Machine Learning
2026-01-11
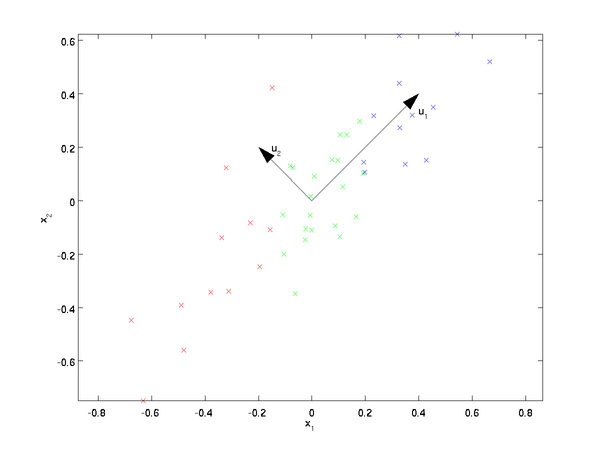
PCA原理总结 PCA的思想 PCA顾名思义,就是找出数据里最主要的方面,用数据里最主要的方面来代替原始数据。具体的,假如我们的数据集是n维的,共有m个数据 (𝑥(1),𝑥(2),...,𝑥(𝑚)) 。我们希望将这m个数据的维度从n维降到n'维,希望这m个n'维的数据集尽可能的代表原始数据集。我们知道数据从n维降到n'维肯定会有损失,但是我们希望损失尽可能的小。那么如何让这n'维的数据尽可能表示原来的数据呢? 我们先看看最简单的情况,也就是n=2,n'=1,也就是将数据从二维降维到一维。数据如下图。我们希望找到某一个维度方向,它可以代表这两个维度的数据。图中列了两个向量方向, u_1 和 𝑢_2 ,那么哪个向量可以更好的代表原始数据集呢?从直观上也可以看出, 𝑢_1 比 𝑢_2 好。 为什么...