Generative Model
2026-01-18
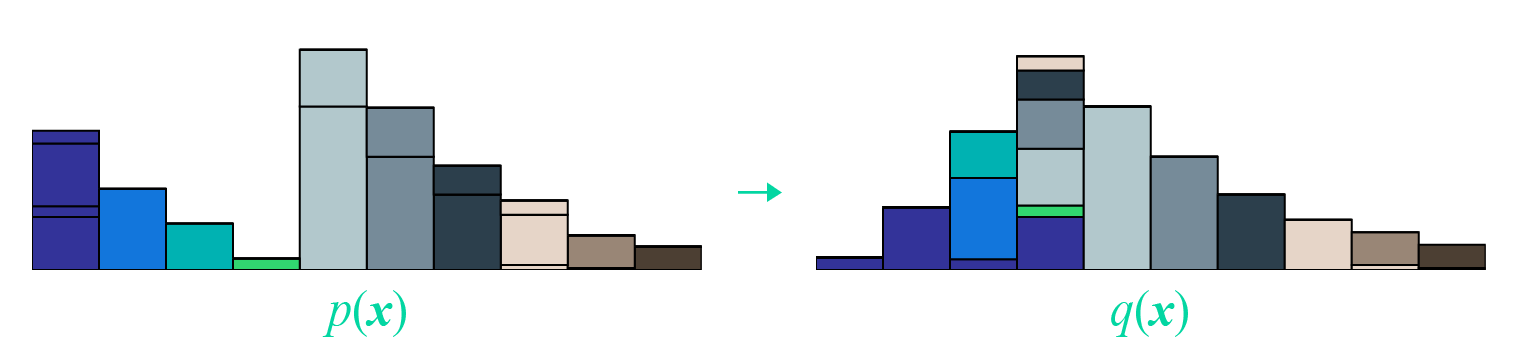
本文受启发于著名的国外博文 《Wasserstein GAN and the Kantorovich-Rubinstein Duality》 ,内容跟它大体上相同,但是删除了一些冗余的部分,对不够充分或者含糊不清的地方作了补充。 Wasserstein距离 显然,整篇文章必然围绕着Wasserstein距离( \(\mathcal{W}\) 距离)来展开。假设我们有了两个概率分布 \(p(x),q(x)\) ,那么Wasserstein距离的定义为 \[\mathcal{W}[p,q]=\inf_{\gamma\in \Pi[p,q]} \iint \gamma(\boldsymbol{x},\boldsymbol{y}) d(\boldsymbol{x},\boldsymbol{y}) d\boldsymbol{x}d\boldsymbol{y}\] 事实上,这也算是最优传输理论中最核心的定义了。 成本函数 首先 \(d(x,y)\) ,它不一定是距离,其准确含义应该是一个成本函数,代表着从 \(x\) 运输到 \(y\) 的成本。常用的 \(d\) 是基于 \(l\)...