Computer Vision
2026-01-21
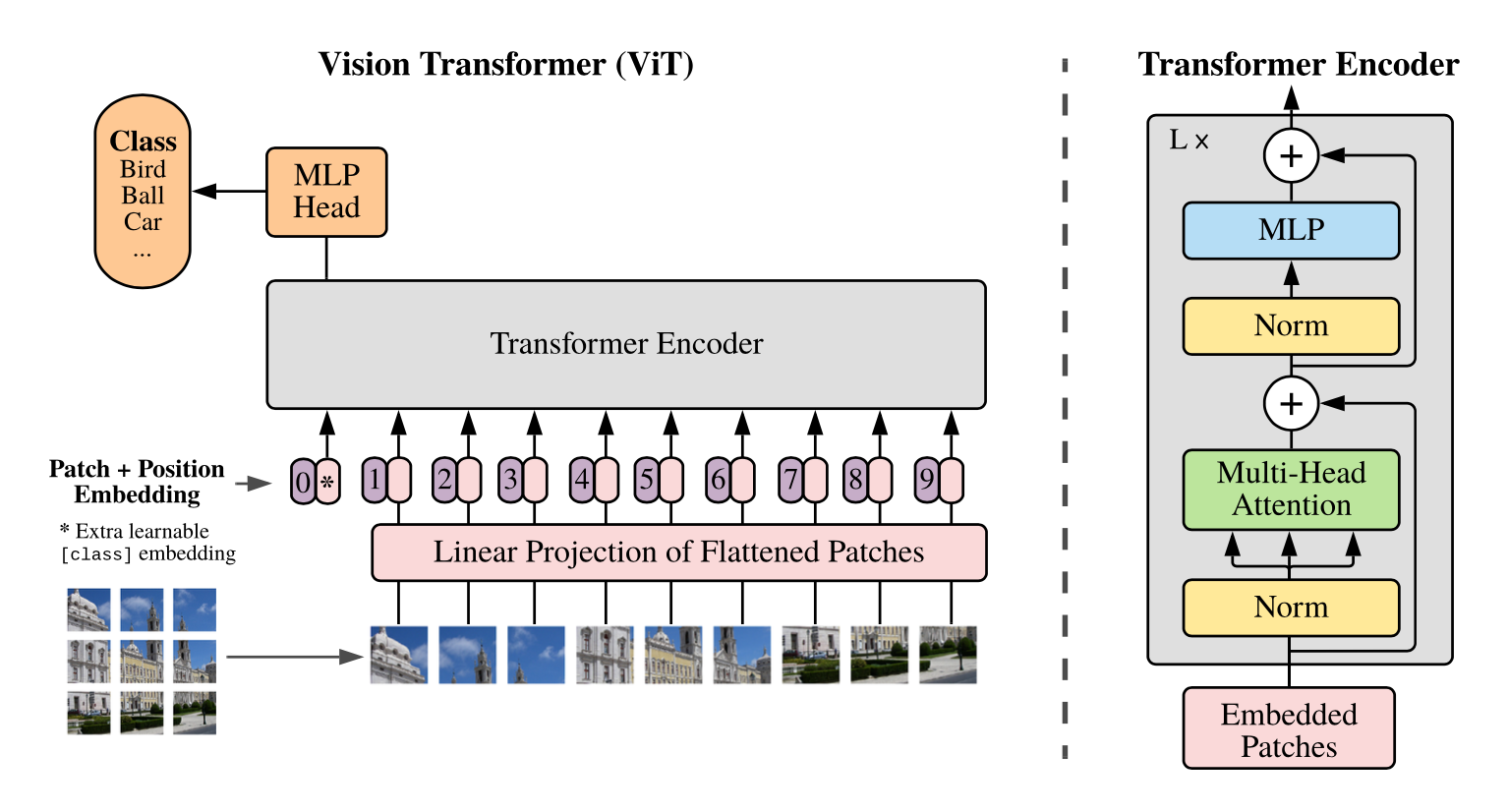
ViT(vision transformer)是Google在2020年提出的直接将transformer应用在图像分类的模型,后面很多的工作都是基于ViT进行改进的。ViT的思路很简单:直接把图像分成固定大小的patchs,然后通过线性变换得到patch embedding,这就类比NLP的words和word embedding,由于transformer的输入就是a sequence of token embeddings,所以将图像的patch embeddings送入transformer后就能够进行特征提取从而分类了。ViT模型原理如下图所示,其实ViT模型只是用了transformer的Encoder来提取特征(原始的transformer还有decoder部分,用于实现sequence to sequence,比如机器翻译)。下面将分别对各个部分做详细的介绍。 Patch Embedding 对于ViT来说,首先要将原始的2-D图像转换成一系列1-D的patch embeddings,这就好似NLP中的word embedding。输入的2-D图像记为 \(x\in...