二叉树结构 class TreeNode:
def __init__(self, x):
self.val = x
self.left = None
self.right = None 递归 时间复杂度: \(O(n)\) , \(n\) 为节点数,访问每个节点恰好一次。 空间复杂度:空间复杂度: \(O(h)\) , \(h\) 为树的高度。最坏情况下需要空间 \(O(n)\) ,平均情况为 \(O(logn)\) 递归1: 二叉树遍历最易理解和实现版本 class Solution:
def preorderTraversal(self, root: TreeNode) -> List[int]:
if not root:
return []
# 前序递归
return [root.val] + self.preorderTraversal(root.left) + self.preorderTraversal(root.right)
...

236. 二叉树的最近公共祖先 给定一个二叉树, 找到该树中两个指定节点的最近公共祖先。 百 度百科中最近公共祖先的定义为:“对于有根树 \(T\) 的两个节点 \(p\) 、 \(q\) ,最近公共祖先表示为一个节点 \(x\) ,满足 \(x\) 是 \(p\) 、 \(q \) 的祖先且 \(x\) 的深度尽可能大( 一个节点也可以是它自己的祖先 )。” 示例 1: 输入:root = [3,5,1,6,2,0,8,null,null,7,4], p = 5, q = 1
输出:3
解释:节点 5 和节点 1 的最近公共祖先是节点 3 。 示例 2: 输入:root = [3,5,1,6,2,0,8,null,null,7,4], p = 5, q = 4
输出:5
解释:节点 5 和节点 4 的最近公共祖先是节点 5 。因为根据定义最近公共祖先节点可以为节点本身。 示例 3: 输入:root = [1,2], p = 1, q = 2
输出:1 提示: 树中节点数目在范围 [2, 10 5 ] 内。 -10 9 <= Node.val <= 10 9 所有 Node.val...
Algorithm
2026-02-25
实现 方式一:使用 heapq 标准库 这是 Python 最快、最节省内存的方式,因为 heapq 底层是用 C 语言实现的。 小顶堆 (Min Heap) Python 的 heapq 默认就是小顶堆。 import heapq
# 初始化
min_heap = []
# 添加元素 O(log N)
heapq.heappush(min_heap, 5)
heapq.heappush(min_heap, 2)
heapq.heappush(min_heap, 8)
# 查看堆顶 O(1)
print(min_heap[0]) # 输出: 2
# 弹出堆顶 O(log N)
pop_val = heapq.heappop(min_heap)
print(pop_val) # 输出: 2
print(min_heap) # 输出: [5, 8] (注意:堆内部不一定有序,但堆顶一定是最小的)
# 将已有的列表转化为堆 O(N)
nums = [5, 7, 1, 3]
heapq.heapify(nums)
print(nums) #...
堆和优先队列的关系 这是一个非常经典且核心的计算机科学概念问题。一言以蔽之: 优先队列(Priority Queue)是逻辑接口(ADT),而堆(Heap)是实现这个接口最高效的物理数据结构。 它们的关系可以类比为 “接口(Interface)” 与 “实现类(Implementation)” 的关系,或者 “汽车(功能)”与 “发动机(核心组件)” 的关系。 优先队列 (Priority Queue) —— 逻辑层 (ADT) 定义 :它是一种 抽象数据类型 (Abstract Data Type, ADT) 。它定义了数据的 行为 ,而不是数据的存储方式。 规则 :普通的队列是“先进先出”(FIFO),而优先队列是 “优先级最高的先出” 。 核心操作 : insert(item, priority) : 插入一个带优先级的元素。 deleteMax() 或 deleteMin() : 取出并删除优先级最高(或最低)的元素。 peek() : 查看优先级最高的元素。 堆 (Heap) —— 物理层 (Data Structure) 定义 :它是一种具体的 数据结构 。通常指 二叉堆...
引入 在具体讲何为「背包 dp」前,先来看如下的例题: 题意概要:有 \( 𝑛\) 个物品和一个容量为 \( 𝑊\) 的背包,每个物品有重量 \(𝑤_𝑖\) 和价值 \(𝑣_𝑖\) 两种属性,要求选若干物品放入背包使背包中物品的总价值最大且背包中物品的总重量不超过背包的容量. 在上述例题中,由于每个物体只有两种可能的状态(取与不取),对应二进制中的 0 和 1,这类问题便被称为「0-1 背包问题」. 0-1背包 解释 例题中已知条件有第 \(𝑖\) 个物品的重量 \(𝑤_𝑖\) ,价值 \(𝑣_𝑖\) ,以及背包的总容量 \(𝑊\) . 设 DP 状态 \(𝑓_{𝑖,𝑗} \) 为在只能放前 \(𝑖\) 个物品的情况下,容量为 \(𝑗\) 的背包所能达到的最大总价值. 考虑转移.假设当前已经处理好了前 \(𝑖 −1 \) 个物品的所有状态,那么对于第 \(𝑖\) 个物品,当其不放入背包时,背包的剩余容量不变,背包中物品的总价值也不变,故这种情况的最大价值为 \(𝑓_{𝑖−1,𝑗}\) ;当其放入背包时,背包的剩余容量会减小 \(𝑤_𝑖\) ,背包中物品的总价值会增大 \(𝑣_𝑖\)...
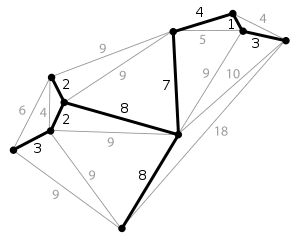
简介 生成树(spanning tree) 在图论中,无向图 \(G=(V,E)\) 的生成树(spanning tree)是具有 \(G\) 的全部顶点,但边数最少的联通子图。假设 \(G\) 中一共有 \(n\) 个顶点,一颗生成树满足下列条件 \(n\) 个顶点; \(n-1\) 条边; \(n\) 个顶点联通; 一个图的生成树可能有多个。 最小生成树(minimum spanning tree, MST)/最小生成森林 :联通加权无向图中边缘权重加和最小的生成树。给定无向图 \(G=(V,E)\) , \((u,v)\) 代表顶点 \(u\) 与顶点 \(v\) 的边, \(w(u,v)\) 代表此边的权重,若存在生成树T使得: \[w(T) = \sum_{(u,v)\in T}w(w,v)\] 最小,则 \(T\) 为 \(G\) 的最小生成树。对于非连通无向图来说,它的每一 连通分量 同样有最小生成树,它们的并被称为 最小生成森林 。最小生成树除了继承生成树的性质之外,还存在下面两个特点: 当图的每一条边的权值都相同时,该图的所有生成树都是最小生成树;...
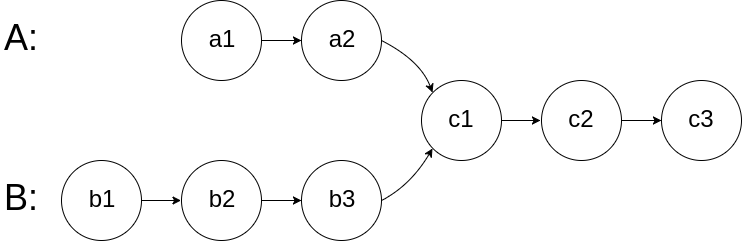
160. 相交链表 题目 给你两个单链表的头节点 headA 和 headB ,请你找出并返回两个单链表相交的起始节点。如果两个链表不存在相交节点,返回 null 。 图示两个链表在节点 c1 开始相交 : 题目数据 保证 整个链式结构中不存在环。 注意 ,函数返回结果后,链表必须 保持其原始结构 。 自定义评测: 评测系统 的输入如下(你设计的程序 不适用 此输入): intersectVal - 相交的起始节点的值。如果不存在相交节点,这一值为 0 listA - 第一个链表 listB - 第二个链表 skipA - 在 listA 中(从头节点开始)跳到交叉节点的节点数 skipB - 在 listB 中(从头节点开始)跳到交叉节点的节点数 评测系统将根据这些输入创建链式数据结构,并将两个头节点 headA 和 headB 传递给你的程序。如果程序能够正确返回相交节点,那么你的解决方案将被 视作正确答案 。 示例 1: 输入:intersectVal = 8, listA = [4,1,8,4,5], listB = [5,6,1,8,4,5], skipA = 2,...