Reinforcement Learning
2026-03-27
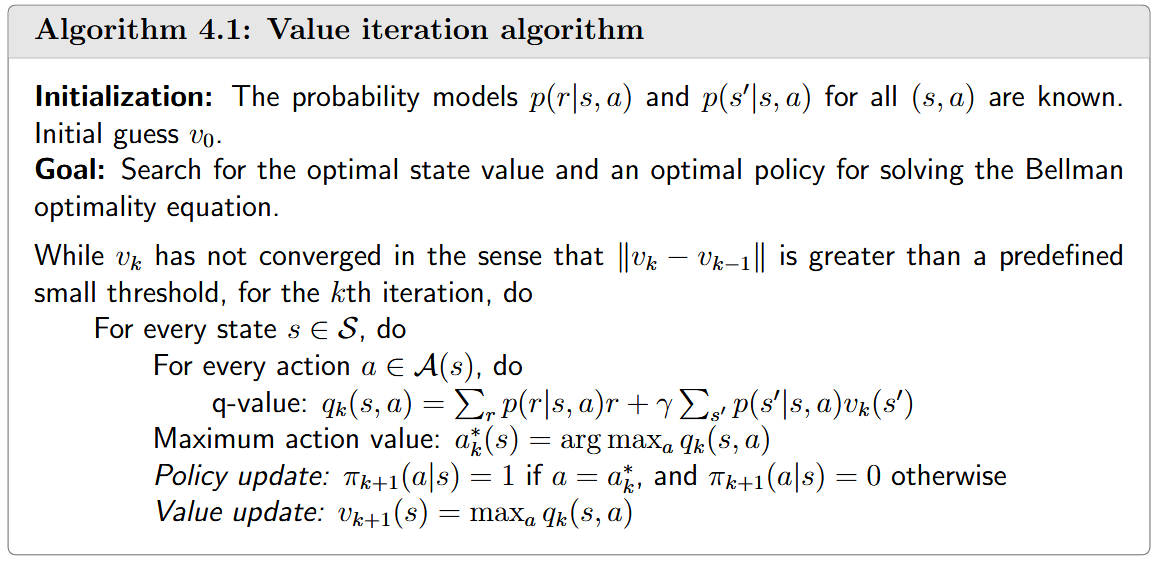
引言 强化学习中,找到最优策略是核心目标。本文详细介绍三种能够找到最优策略的基础算法: 价值迭代、策略迭代和截断策略迭代 。这些算法属于动态规划范畴,需要系统模型,是后续无模型强化学习算法的重要基础。 在强化学习的发展路线中,这些算法处于"基础工具"到"算法/方法"的过渡阶段,是从"有模型"到"无模型"学习的重要桥梁。 价值迭代(Value iteration) 价值迭代算法 基于收缩映射定理求解贝尔曼最优方程 。其核心迭代公式为: \[\begin{equation}v_{k+1} = \max_{\pi \in \Pi} (r_\pi + \gamma P_\pi v_k), k = 0, 1, 2, ...\tag{1}\end{equation}\] 根据收缩映射定理,当 \(k \to \infty\) 时, \(v_k\) 和 \(\pi_k\) 分别收敛到最优状态值和最优策略。 每次迭代包含两个步骤: 策略更新步骤 (policy update step) :找到能解决以下优化问题的策略 \[\pi_{k+1} = \arg\max_\pi (r_\pi +...