背包问题
Algorithm
2026-01-11
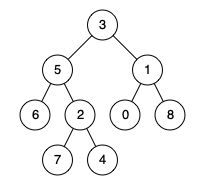
题目 给定一个二叉树, 找到该树中两个指定节点的最近公共祖先。 百度百科中最近公共祖先的定义为:“对于有根树 T 的两个节点 p、q,最近公共祖先表示为一个节点 x,满足 x 是 p、q 的祖先且 x 的深度尽可能大(一个节点也可以是它自己的祖先)。” 示例 1: 输入:root = [3,5,1,6,2,0,8,null,null,7,4], p = 5, q = 1 输出:3 解释:节点 5 和节点 1 的最近公共祖先是节点 3 。 示例 2: 输入:root = [3,5,1,6,2,0,8,null,null,7,4], p = 5, q = 4 输出:5 解释:节点 5 和节点 4 的最近公共祖先是节点 5 。因为根据定义最近公共祖先节点可以为节点本身。 示例 3: 输入:root...
Algorithm
2026-01-11
题目 Given two sorted integer arrays nums1 and nums2, merge nums2 into nums1 as one sorted array. Note: The number of elements initialized in nums1 and nums2 are m and n respectively. You may assume that nums1 has enough space (size that is equal to m + n) to hold additional elements from nums2. Example: [代码] Constraints: 10^9 <= nums1[i], nums2[i] <...
Large Model
2026-01-11

梯度检查点(Gradient Checkpointing) 大模型的参数量巨大,即使将batch_size设置为1并使用梯度累积的方式更新,也仍然会OOM。原因是通常在计算梯度时,我们需要将所有前向传播时的激活值保存下来,这消耗大量显存。 还有另外一种延迟计算的思路,丢掉前向传播时的激活值,在计算梯度时需要哪部分的激活值就重新计算哪部分的激活值,这样做倒是解决了显存不足的问题,但加大了计算量同时也拖慢了训练。 梯度检查点(Gradient Checkpointing)在上述两种方式之间取了一个平衡,这种方法采用了一种策略选择了计算图上的一部分激活值保存下来,其余部分丢弃,这样被丢弃的那一部分激活值需要在计算梯度时重新计算。 下面这个动图展示了一种简单策略:前向传播过程中计算节点的激活值并保存...
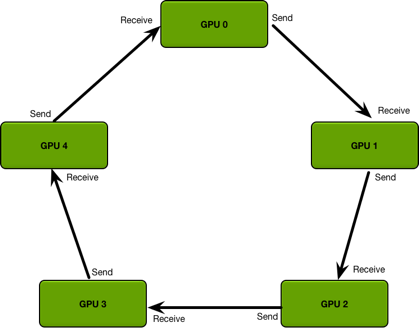
Quick Start 一个最简单的DDP Pytorch例子! 环境准备 PyTorch(gpu)=1.5,python=3.6 推荐使用官方打好的PyTorch docker,避免乱七八糟的环境问题影响心情。 [代码] 代码 单GPU代码 [代码] 加入DDP的代码 [代码] DDP的基本原理 大白话原理 假如我们有N张显卡, 1. (缓解GIL限制)在DDP模式下,会有N个进程被启动,每个进程在一张卡上加载一个模型,这些模型的参数在数值上是相同的。 1. (RingReduce加速)在模型训练时,各个进程通过一种叫RingReduce的方法与其他进程通讯,交换各自的梯度,从而获得所有进程的梯度; 1. (实际上就是Data Parallelism)各个进程用平均后的梯度更新自己的参数,...
DFS
Python
2026-01-11
@tf_export为函数取了个名字! Tensorflow经常看到定义的函数前面加了@tf_export。例如,tensorflow/python/platform/app.py中有: [代码] 首先,@tf_export是一个修饰符。修饰符的本质是一个函数 tf_export的实现在tensorflow/python/util/tf_export.py中: [代码] 等号的右边的理解分两步: 1. functools.partial 1. api_export functools.partial是偏函数,它的本质简而言之是为函数固定某些参数。如:functools.partial(FuncA, p1)的作用是把函数FuncA的第一个参数固定为p1;又如functools.partial(...
NLP
2026-01-11

取代RNN——Transformer 在介绍Transformer前我们来回顾一下RNN的结构 对RNN有一定了解的话,一定会知道,RNN有两个很明显的问题 效率问题:需要逐个词进行处理,后一个词要等到前一个词的隐状态输出以后才能开始处理 如果传递距离过长还会有梯度消失、梯度爆炸和遗忘问题 为了缓解传递间的梯度和遗忘问题,设计了各种各样的RNN cell,最著名的两个就是LSTM和GRU了 LSTM (Long Short Term Memory) GRU (Gated Recurrent Unit) 但是,引用网上一个博主的比喻,这么做就像是在给马车换车轮,为什么不直接换成汽车呢? 于是就有了Transformer。Transformer 是Google Brain 2017的提出的一篇工...
Reinforcement Learning
2026-01-11

引言与背景 蒙特卡洛方法是强化学习中的重要算法类别,它标志着从基于模型到无模型算法的转变。这类算法不依赖环境模型,而是通过与环境的直接交互获取经验数据来学习最优策略。 蒙特卡洛方法在强化学习算法谱系中处于"无模型"方法的起始位置,是从基于模型的方法(如值迭代和策略迭代)向无模型方法过渡的第一步。 无模型强化学习的核心理念可以简述为:如果没有模型,我们必须有数据;如果没有数据,我们必须有模型;如果两者都没有,我们就无法找到最优策略。在强化学习中,"数据"通常指智能体与环境交互的经验。 均值估计问题 在介绍蒙特卡洛强化学习算法之前,我们首先需要理解均值估计问题,这是理解从数据而非模型中学习的基础。 考虑一个可以取有限实数集合 X 中值的随机变量 X ,我们的任务是计算 X 的均值或期望值: E[...
PyTorch中,所有神经网络的核心是 autograd 包。 autograd 包为张量上的所有操作提供了自动求导机制。它是一个在运行时定义(definebyrun)的框架,这意味着反向传播是根据代码如何运行来决定的,并且每次迭代可以是不同的. 让我们用一些简单的例子来看看吧。 张量 torch.Tensor 是这个包的核心类。如果设置它的属性 .requires_grad 为 True,那么它将会追踪对于该张量的所有操作。当完成计算后可以通过调用 .backward(),来自动计算所有的梯度。这个张量的所有梯度将会自动累加到.grad属性. 要阻止一个张量被跟踪历史,可以调用 .detach() 方法将其与计算历史分离,并阻止它未来的计算记录被跟踪。 为了防止跟踪历史记录(和使用内存),...
计算几何(Computational Geometry),是一系列使用计算机解决几何问题的算法。与解析几何相比,计算几何更适合计算机运算,精度较高,运算速度较快,并且易于编写。 浮点误差 程序设计中,考虑到浮点数 double 有精度误差,在比较时,通常允许一定的误差,即对于两个数 a 、 b ,如果 [Math] ,则认为 a=b 。一般根据题目要求, d (代码中命名为 EPS)取一个较小值,如 10^{8} 。 [代码] 向量 向量(vector)是一个有大小和方向的量,在几何中,它被表示为带箭头的线段。向量可以用起点和终点的坐标来表示 —— 从点 A到点B 的向量表示为 [Math] 。 向量的书写,两个大写字母上加一个箭头(表示方向) [Math] 向量没有位置,即向量可以在平面内...