
236. 二叉树的最近公共祖先 给定一个二叉树, 找到该树中两个指定节点的最近公共祖先。 百 度百科中最近公共祖先的定义为:“对于有根树 \(T\) 的两个节点 \(p\) 、 \(q\) ,最近公共祖先表示为一个节点 \(x\) ,满足 \(x\) 是 \(p\) 、 \(q \) 的祖先且 \(x\) 的深度尽可能大( 一个节点也可以是它自己的祖先 )。” 示例 1: 输入:root = [3,5,1,6,2,0,8,null,null,7,4], p = 5, q = 1
输出:3
解释:节点 5 和节点 1 的最近公共祖先是节点 3 。 示例 2: 输入:root = [3,5,1,6,2,0,8,null,null,7,4], p = 5, q = 4
输出:5
解释:节点 5 和节点 4 的最近公共祖先是节点 5 。因为根据定义最近公共祖先节点可以为节点本身。 示例 3: 输入:root = [1,2], p = 1, q = 2
输出:1 提示: 树中节点数目在范围 [2, 10 5 ] 内。 -10 9 <= Node.val <= 10 9 所有 Node.val...
Algorithm
2026-02-25
实现 方式一:使用 heapq 标准库 这是 Python 最快、最节省内存的方式,因为 heapq 底层是用 C 语言实现的。 小顶堆 (Min Heap) Python 的 heapq 默认就是小顶堆。 import heapq
# 初始化
min_heap = []
# 添加元素 O(log N)
heapq.heappush(min_heap, 5)
heapq.heappush(min_heap, 2)
heapq.heappush(min_heap, 8)
# 查看堆顶 O(1)
print(min_heap[0]) # 输出: 2
# 弹出堆顶 O(log N)
pop_val = heapq.heappop(min_heap)
print(pop_val) # 输出: 2
print(min_heap) # 输出: [5, 8] (注意:堆内部不一定有序,但堆顶一定是最小的)
# 将已有的列表转化为堆 O(N)
nums = [5, 7, 1, 3]
heapq.heapify(nums)
print(nums) #...
堆和优先队列的关系 这是一个非常经典且核心的计算机科学概念问题。一言以蔽之: 优先队列(Priority Queue)是逻辑接口(ADT),而堆(Heap)是实现这个接口最高效的物理数据结构。 它们的关系可以类比为 “接口(Interface)” 与 “实现类(Implementation)” 的关系,或者 “汽车(功能)”与 “发动机(核心组件)” 的关系。 优先队列 (Priority Queue) —— 逻辑层 (ADT) 定义 :它是一种 抽象数据类型 (Abstract Data Type, ADT) 。它定义了数据的 行为 ,而不是数据的存储方式。 规则 :普通的队列是“先进先出”(FIFO),而优先队列是 “优先级最高的先出” 。 核心操作 : insert(item, priority) : 插入一个带优先级的元素。 deleteMax() 或 deleteMin() : 取出并删除优先级最高(或最低)的元素。 peek() : 查看优先级最高的元素。 堆 (Heap) —— 物理层 (Data Structure) 定义 :它是一种具体的 数据结构 。通常指 二叉堆...
引入 在具体讲何为「背包 dp」前,先来看如下的例题: 题意概要:有 \( 𝑛\) 个物品和一个容量为 \( 𝑊\) 的背包,每个物品有重量 \(𝑤_𝑖\) 和价值 \(𝑣_𝑖\) 两种属性,要求选若干物品放入背包使背包中物品的总价值最大且背包中物品的总重量不超过背包的容量. 在上述例题中,由于每个物体只有两种可能的状态(取与不取),对应二进制中的 0 和 1,这类问题便被称为「0-1 背包问题」. 0-1背包 解释 例题中已知条件有第 \(𝑖\) 个物品的重量 \(𝑤_𝑖\) ,价值 \(𝑣_𝑖\) ,以及背包的总容量 \(𝑊\) . 设 DP 状态 \(𝑓_{𝑖,𝑗} \) 为在只能放前 \(𝑖\) 个物品的情况下,容量为 \(𝑗\) 的背包所能达到的最大总价值. 考虑转移.假设当前已经处理好了前 \(𝑖 −1 \) 个物品的所有状态,那么对于第 \(𝑖\) 个物品,当其不放入背包时,背包的剩余容量不变,背包中物品的总价值也不变,故这种情况的最大价值为 \(𝑓_{𝑖−1,𝑗}\) ;当其放入背包时,背包的剩余容量会减小 \(𝑤_𝑖\) ,背包中物品的总价值会增大 \(𝑣_𝑖\)...
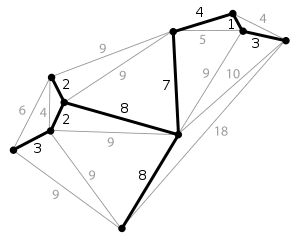
简介 生成树(spanning tree) 在图论中,无向图 \(G=(V,E)\) 的生成树(spanning tree)是具有 \(G\) 的全部顶点,但边数最少的联通子图。假设 \(G\) 中一共有 \(n\) 个顶点,一颗生成树满足下列条件 \(n\) 个顶点; \(n-1\) 条边; \(n\) 个顶点联通; 一个图的生成树可能有多个。 最小生成树(minimum spanning tree, MST)/最小生成森林 :联通加权无向图中边缘权重加和最小的生成树。给定无向图 \(G=(V,E)\) , \((u,v)\) 代表顶点 \(u\) 与顶点 \(v\) 的边, \(w(u,v)\) 代表此边的权重,若存在生成树T使得: \[w(T) = \sum_{(u,v)\in T}w(w,v)\] 最小,则 \(T\) 为 \(G\) 的最小生成树。对于非连通无向图来说,它的每一 连通分量 同样有最小生成树,它们的并被称为 最小生成森林 。最小生成树除了继承生成树的性质之外,还存在下面两个特点: 当图的每一条边的权值都相同时,该图的所有生成树都是最小生成树;...
3D Model
2026-02-12

深度相机 “工欲善其事必先利其器‘’我们先从能够获取RGBD数据的相机开始谈起。首先我们来看一看其分类。 根据其工作原理主要分为三类: 1.双目方案 基于双目立体视觉的深度相机类似人类的双眼,和基于TOF、结构光原理的深度相机不同,它不对外主动投射光源,完全依靠拍摄的两张图片(彩色RGB或者灰度图)来计算深度,因此有时候也被称为被动双目深度相机。比较知名的产品有STEROLABS 推出的 ZED 2K Stereo Camera和Point Grey 公司推出的 BumbleBee。 双目立体视觉是基于视差原理,由多幅图像获取物体三维几何信息的方法。在机器视觉系统中, 双目视觉一般由双摄像机从不同角度同时获取周围景物的两幅数字图像,或有由单摄像机在不同时刻从不同角度获取周围景物的两幅数字图像 ,并基于视差原理即可恢复出物体三维几何信息,重建周围景物的三维形状与位置。 双目视觉有的时候我们也会把它称为体视,是人类利用双眼获取环境三维信息的主要途径。从目前来看,随着机器视觉理论的发展,双目立体视觉在机器视觉研究中发回来看了越来越重要的作用 为什么非得用双目相机才能得到深度?...
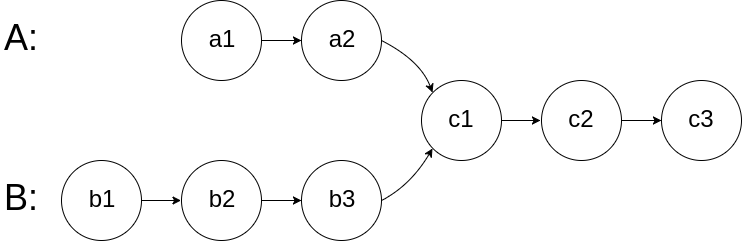
160. 相交链表 题目 给你两个单链表的头节点 headA 和 headB ,请你找出并返回两个单链表相交的起始节点。如果两个链表不存在相交节点,返回 null 。 图示两个链表在节点 c1 开始相交 : 题目数据 保证 整个链式结构中不存在环。 注意 ,函数返回结果后,链表必须 保持其原始结构 。 自定义评测: 评测系统 的输入如下(你设计的程序 不适用 此输入): intersectVal - 相交的起始节点的值。如果不存在相交节点,这一值为 0 listA - 第一个链表 listB - 第二个链表 skipA - 在 listA 中(从头节点开始)跳到交叉节点的节点数 skipB - 在 listB 中(从头节点开始)跳到交叉节点的节点数 评测系统将根据这些输入创建链式数据结构,并将两个头节点 headA 和 headB 传递给你的程序。如果程序能够正确返回相交节点,那么你的解决方案将被 视作正确答案 。 示例 1: 输入:intersectVal = 8, listA = [4,1,8,4,5], listB = [5,6,1,8,4,5], skipA = 2,...
Reinforcement Learning
2026-01-11

引言 DDPG同样使用了ActorCritic的结构,Deterministic的确定性策略是和随机策略相对而言的,对于某一些动作集合来说,它可能是连续值,或者非常高维的离散值,这样动作的空间维度极大。如果我们使用随机策略,即像DQN一样研究它所有的可能动作的概率,并计算各个可能的动作的价值的话,那需要的样本量是非常大才可行的。于是有人就想出使用确定性策略来简化这个问题。 作为随机策略,在相同的策略,在同一个状态 s 处,采用的动作 [Math] 是基于一个概率分布的,即是不确定的。而确定性策略则决定简单点,虽然在同一个状态处,采用的动作概率不同,但是最大概率只有一个,如果我们只取最大概率的动作,去掉这个概率分布,那么就简单多了。即作为确定性策略,相同的策略,在同一个状态处,动作是唯一确定的...
Reinforcement Learning
2026-01-11

概述与理论背景 ActorCritic方法是强化学习中的一类重要算法,它巧妙地结合了基于策略(policybased)和基于价值(valuebased)的方法。在这种结构中,"Actor"指策略更新步骤,负责根据策略执行动作;而"Critic"指价值更新步骤,负责评估Actor的表现。从另一个角度看,ActorCritic方法本质上仍是策略梯度算法,可以通过扩展策略梯度算法获得。 ActorCritic方法在强化学习中的位置非常重要,它既保留了策略梯度方法直接优化策略的优势,又利用了值函数方法的效率。这种结合使得ActorCritic方法成为解决复杂强化学习问题的强大工具。 最简单的ActorCritic算法(QAC) QAC算法通过扩展策略梯度方法得到。策略梯度方法的核心思想是通过最大化标...
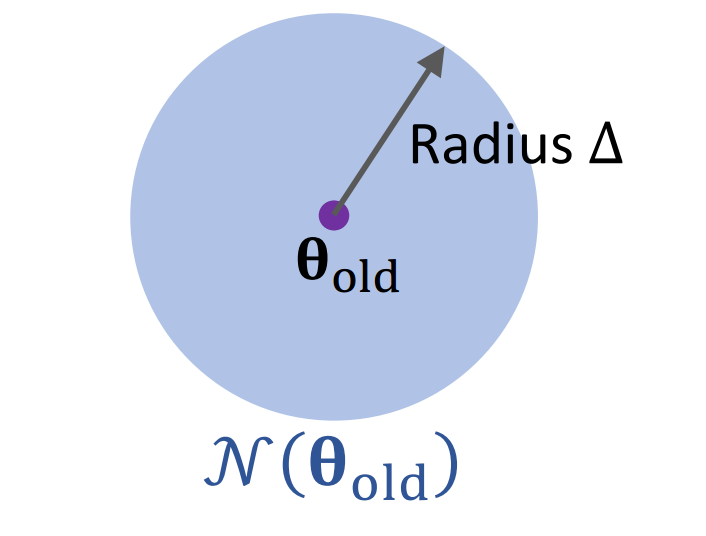
💡 引言 Trust Region Policy Optimization (TRPO) 是2015年的ICML会议上提出的一种强大的基于策略的强化学习算法。TRPO 解决了传统策略梯度方法中的一些关键问题,特别是训练不稳定和步长选择困难的问题。与传统策略梯度算法相比,TRPO 具有更高的稳健性和样本效率,能够在复杂环境中取得更好的性能。 优化基础 在深入了解 TRPO 之前,我们需要先简单回顾一些优化方法的基础知识。 梯度上升法 梯度上升法是一种迭代优化算法,用于寻找函数的局部最大值。 目标:找到使目标函数 [Math] 最大化的参数 [Math] : [公式] 梯度上升迭代过程: 1. 在当前参数 [Math] 处计算梯度: [Math] 1. 更新参数: 梯度上升法的主要问题是学习率的...
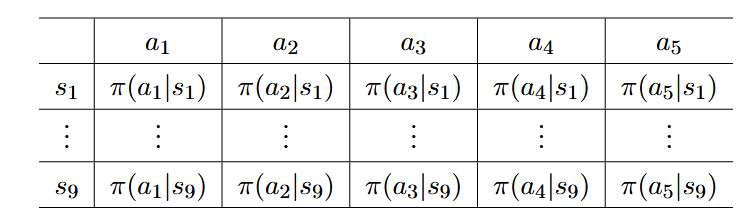
引言与背景 策略梯度方法是强化学习中的一种重要方法,它标志着从基于价值的方法向基于策略的方法的重要转变。之前我们主要讨论了基于价值的方法(valuebased),而策略梯度方法则直接优化策略函数(policybased),这是一个重要的进步。 当策略用函数表示时,策略梯度方法的核心思想是通过优化某些标量指标来获得最优策略。与传统的表格表示策略不同,策略梯度方法使用参数化函数 [Math] 来表示策略,其中 [Math] 是参数向量。这种表示方法也可以写成其他形式,如 [Math] 、 [Math] 或 [Math] 。 策略梯度方法具有多种优势: 更高效地处理大型状态/动作空间 具有更强的泛化能力 样本使用效率更高 策略表示:从表格到函数 当策略的表示从表格转变为函数时,存在以下几个关键区别...
Reinforcement Learning
2026-01-11
引言 大语言模型(LLMs)在近年来取得了显著进展,展现出上下文学习、指令跟随和逐步推理等突出特性。然而,由于这些模型是在包含高质量和低质量数据的预训练语料库上训练的,它们可能会表现出编造事实、生成有偏见或有毒文本等意外行为。因此,将LLMs与人类价值观对齐变得至关重要,特别是在帮助性、诚实性和无害性(3H)方面。 基于人类反馈的强化学习(RLHF)已被验证为有效的对齐方法,但训练过程复杂且不稳定。本文深入分析了RLHF框架,特别是PPO算法的内部工作原理,并提出了PPOmax算法,以提高策略模型训练的稳定性和效果。 RLHF的基本框架 RLHF训练过程包括三个主要阶段: 1. 监督微调(SFT):模型通过模仿人类标注的对话示例来学习一般的人类对话方式, 优化模型的指令跟随能力 1. 奖励模...