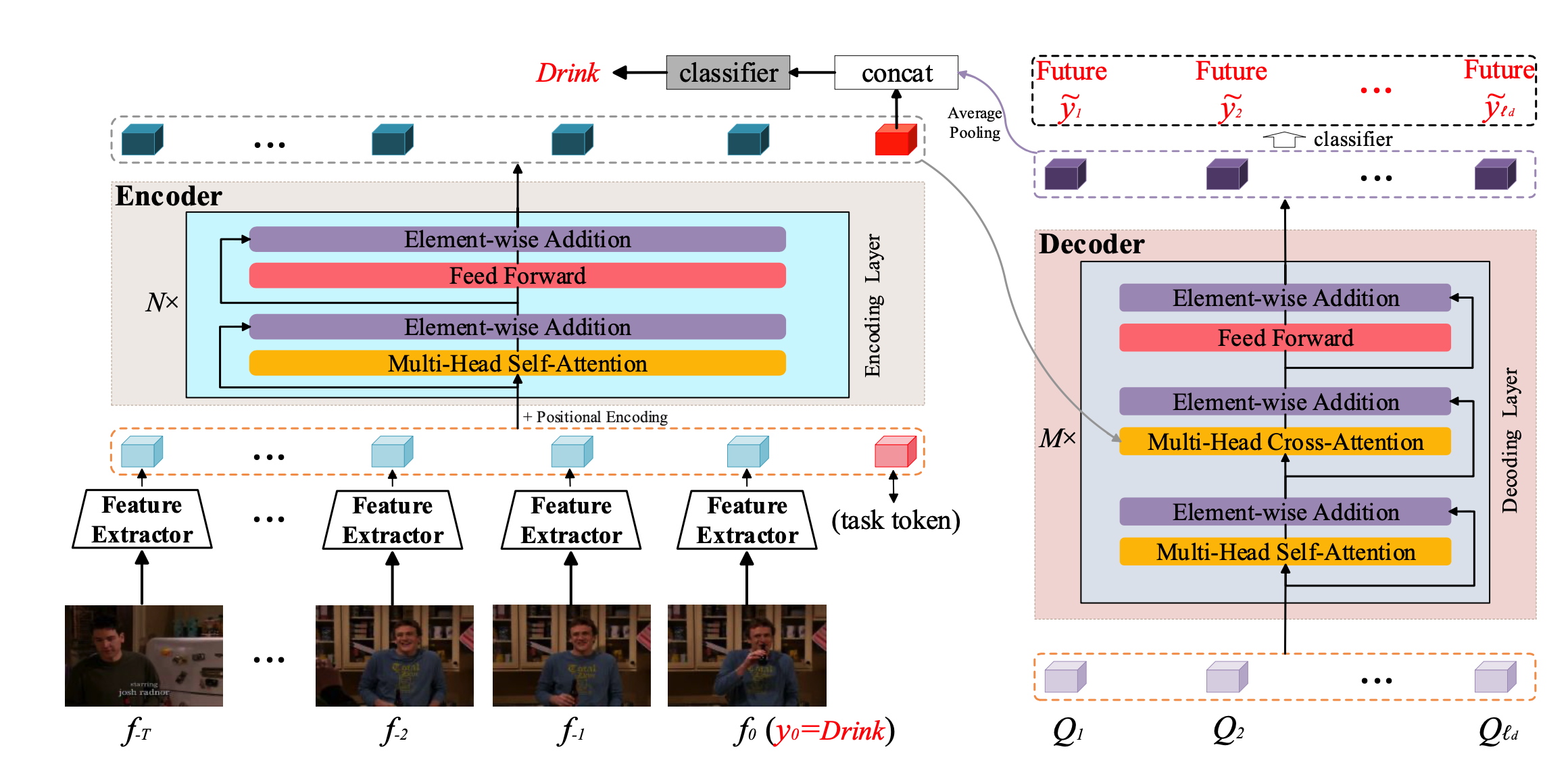
简介 之前的很多方法都是用RNN的结构去构建时序上的依赖关系,但是RNN的结构的缺点是不能并行操作,且存在梯度消失的现象。所以本文就是将之前的RNN的结构改为Transfomer的形式。延续了之前TRN的整个网络的框架,也是结合了对未来帧的预测与历史帧的表示相结合来对当前的动作进行预测。 方法 整个网络框架如上图所示, Encoder就是利用transfomer对longrange的历史和目前帧进行特征表示,其中要说明的一个点就是,这里的特征空间包含T个历史特征,当前窗口的特征以及一个task token,这个task token的作用可以从下图看出来 这幅图对比的是输入进classifier的特征与网络输入的特征的相似性,可以看出w/o task token 对应的是当前t=0时刻的特征,...
Large Model
2026-01-11

梯度检查点(Gradient Checkpointing) 大模型的参数量巨大,即使将batch_size设置为1并使用梯度累积的方式更新,也仍然会OOM。原因是通常在计算梯度时,我们需要将所有前向传播时的激活值保存下来,这消耗大量显存。 还有另外一种延迟计算的思路,丢掉前向传播时的激活值,在计算梯度时需要哪部分的激活值就重新计算哪部分的激活值,这样做倒是解决了显存不足的问题,但加大了计算量同时也拖慢了训练。 梯度检查点(Gradient Checkpointing)在上述两种方式之间取了一个平衡,这种方法采用了一种策略选择了计算图上的一部分激活值保存下来,其余部分丢弃,这样被丢弃的那一部分激活值需要在计算梯度时重新计算。 下面这个动图展示了一种简单策略:前向传播过程中计算节点的激活值并保存...
NLP
2026-01-11

取代RNN——Transformer 在介绍Transformer前我们来回顾一下RNN的结构 对RNN有一定了解的话,一定会知道,RNN有两个很明显的问题 效率问题:需要逐个词进行处理,后一个词要等到前一个词的隐状态输出以后才能开始处理 如果传递距离过长还会有梯度消失、梯度爆炸和遗忘问题 为了缓解传递间的梯度和遗忘问题,设计了各种各样的RNN cell,最著名的两个就是LSTM和GRU了 LSTM (Long Short Term Memory) GRU (Gated Recurrent Unit) 但是,引用网上一个博主的比喻,这么做就像是在给马车换车轮,为什么不直接换成汽车呢? 于是就有了Transformer。Transformer 是Google Brain 2017的提出的一篇工...
Generative Model
2026-01-11

SD模型原理 SD是CompVis、Stability AI和LAION等公司研发的一个文生图模型,它的模型和代码是开源的,而且训练数据LAION5B也是开源的。SD在开源90天github仓库就收获了33K的stars,可见这个模型是多受欢迎。 SD是一个基于latent的扩散模型,它在UNet中引入text condition来实现基于文本生成图像。SD的核心来源于Latent Diffusion这个工作,常规的扩散模型是基于pixel的生成模型,而Latent Diffusion是基于latent的生成模型,它先采用一个autoencoder将图像压缩到latent空间,然后用扩散模型来生成图像的latents,最后送入autoencoder的decoder模块就可以得到生成的图像。 ...
Large Model
2026-01-11

引言与背景 FlashAttention的关键创新在于使用类似于在线Softmax的思想来对自注意力计算进行分块(tiling),从而能够融合整个多头注意力层的计算,而无需访问GPU全局内存来存储中间的logits和注意力分数 在深度学习中,Transformer模型的自注意力机制是计算密集型操作。传统实现需要在GPU全局内存中存储大量中间结果,这导致: 内存瓶颈:中间矩阵占用大量显存 I/O开销:频繁的全局内存访问降低效率 扩展性限制:难以处理超长序列 FlashAttention通过算法创新解决了这些问题。 SelfAtention 自注意力机制的计算可以总结为(为简化说明,忽略头数和批次维度,也省略注意力掩码和缩放因子 [Math] ): [公式] 其中: Q, K, V, O 都是形...
Computer Vision
2026-01-11

原理分析 网络架构: 本文的任务是Object detection,用到的工具是Transformers,特点是Endtoend。 目标检测的任务是要去预测一系列的Bounding Box的坐标以及Label, 现代大多数检测器通过定义一些proposal,anchor或者windows,把问题构建成为一个分类和回归问题来间接地完成这个任务。文章所做的工作,就是将transformers运用到了object detection领域,取代了现在的模型需要手工设计的工作,并且取得了不错的结果。在object detection上DETR准确率和运行时间上和Faster RCNN相当;将模型 generalize 到 panoptic segmentation 任务上,DETR表现甚至还超过了其他...
NLP
2026-01-11

摘掉Softmax 制约Attention性能的关键因素,其实是定义里边的Softmax!事实上,简单地推导一下就可以得到这个结论。 [Math] 这一步我们得到一个 [Math] 的矩阵,就是这一步决定了Attention的复杂度是 [Math] ;如果没有Softmax,那么就是三个矩阵连乘 [Math] ,而矩阵乘法是满足结合率的,所以我们可以先算 [Math] ,得到一个 [Math] 的矩阵,然后再用 [Math] 左乘它,由于 [Math] ,所以这样算大致的复杂度只是 [Math] (就是 [Math] 左乘那一步占主导)。 也就是说,去掉Softmax的Attention的复杂度可以降到最理想的线性级别 [Math] !这显然就是我们的终极追求:Linear Attentio...
NLP
2026-01-11

概述 本文介绍一个比较有意思的高效Transformer工作——来自Google的《Transformer Quality in Linear Time》,经过细读之后,笔者认为论文里边真算得上是“惊喜满满”了~ 什么样的结果值得我们用“惊喜”来形容?有没有言过其实?我们不妨先来看看论文做到了什么: 1. 提出了一种新的Transformer变体,它依然具有二次的复杂度,但是相比标准的Transformer,它有着更快的速度、更低的显存占用以及更好的效果; 1. 提出一种新的线性化Transformer方案,它不但提升了原有线性Attention的效果,还保持了做Decoder的可能性,并且做Decoder时还能保持高效的训练并行性。 说实话,笔者觉得做到以上任意一点都是非常难得的,而这篇论...
Reinforcement Learning
2026-01-11

引言 DDPG同样使用了ActorCritic的结构,Deterministic的确定性策略是和随机策略相对而言的,对于某一些动作集合来说,它可能是连续值,或者非常高维的离散值,这样动作的空间维度极大。如果我们使用随机策略,即像DQN一样研究它所有的可能动作的概率,并计算各个可能的动作的价值的话,那需要的样本量是非常大才可行的。于是有人就想出使用确定性策略来简化这个问题。 作为随机策略,在相同的策略,在同一个状态 s 处,采用的动作 [Math] 是基于一个概率分布的,即是不确定的。而确定性策略则决定简单点,虽然在同一个状态处,采用的动作概率不同,但是最大概率只有一个,如果我们只取最大概率的动作,去掉这个概率分布,那么就简单多了。即作为确定性策略,相同的策略,在同一个状态处,动作是唯一确定的...
NLP
2026-01-11

概述 SSM的概念由来已久,但这里我们特指深度学习中的SSM,一般认为其开篇之作是2021年的 S4,不算太老,而SSM最新最火的变体大概是Mamba。当然,当我们谈到SSM时,也可能泛指一切线性RNN模型,这样RWKV、RetNet还有此前LRU都可以归入此类。不少SSM变体致力于成为Transformer的竞争者,尽管笔者并不认为有完全替代的可能性,但SSM本身优雅的数学性质也值得学习一番。 尽管我们说SSM起源于S4,但在S4之前,SSM有一篇非常强大的奠基之作《HiPPO: Recurrent Memory with Optimal Polynomial Projections》(简称HiPPO),所以本文从HiPPO开始说起。 另外值得一提的是,SSM代表作HiPPO、S4、Mam...
Large Model
2026-01-11
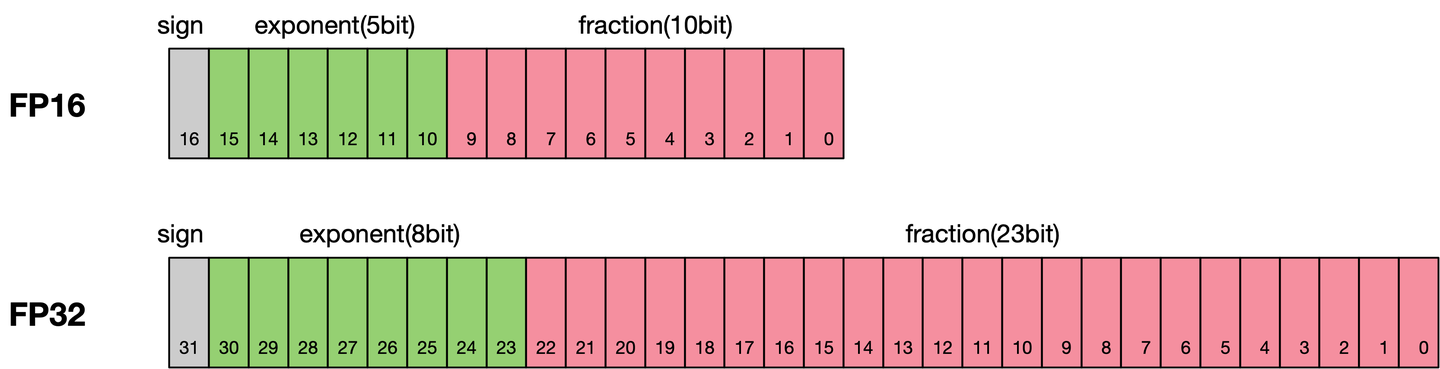
通常我们训练神经网络模型的时候默认使用的数据类型为单精度FP32。近年来,为了加快训练时间、减少网络训练时候所占用的内存,并且保存训练出来的模型精度持平的条件下,业界提出越来越多的混合精度训练的方法。这里的混合精度训练是指在训练的过程中,同时使用单精度(FP32)和半精度(FP16)。 浮点数据类型 浮点数据类型主要分为双精度(FP64)、单精度(FP32)、半精度(FP16)。在神经网络模型的训练过程中,一般默认采用单精度(FP32)浮点数据类型,来表示网络模型权重和其他参数。在了解混合精度训练之前,这里简单了解浮点数据类型。 根据IEEE二进制浮点数算术标准(IEEE 754)的定义,浮点数据类型分为双精度(FP64)、单精度(FP32)、半精度(FP16)三种,其中每一种都有三个不同的...