Generative Model
2026-01-18
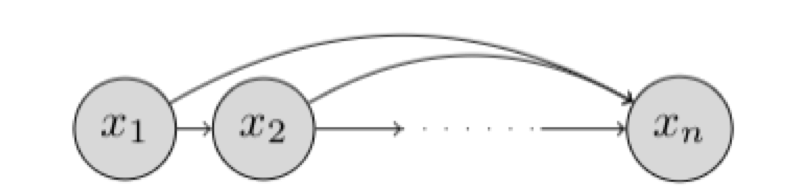
研究对象与基本设定 我们希望学习一个能够“生成数据”的概率模型。假设我们有一个数据集 \(D\) ,每个样本是 \(n\) 维二值向量: \(x \in \{0,1\}^n\) 我们的目标是用一个参数化分布 \(p_\theta(x)\) 去逼近真实数据分布 \(p_{\text{data}}(x)\) ,并最终能够: 密度估计 :给定 \(x\) 计算 \(p_\theta(x)\) 或 \(\log p_\theta(x)\) 采样生成 :从 \(p_\theta(x)\) 采样得到新的 \(x\) 表示:链式法则与自回归分解 链式法则分解联合分布 任意联合分布都可用概率链式法则分解为条件概率的乘积: \[p(x) = \prod_{i=1}^{n} p(x_i \mid x_1, x_2, \dots, x_{i-1}) = \prod_{i=1}^{n} p(x_i \mid x_{<i})\] 其中: \(x_{<i} = [x_1, x_2, \dots, x_{i-1}]\) ,这意味着:只要我们能为每个维度 \(i\) 学好一个条件分布 \(p(x_i \mid...