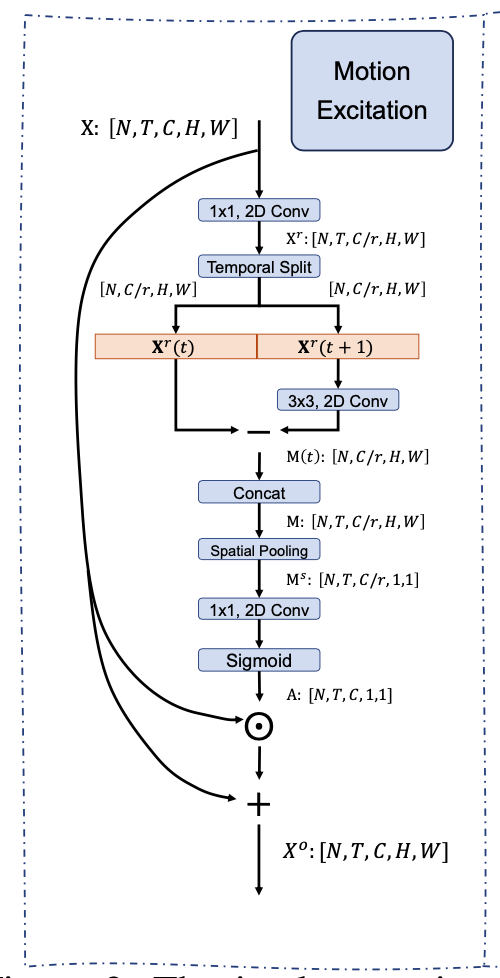
Motivation Motion feature 学习过程中存在的问题: 利用 optical flow 存储和计算的开销太大 现阶段的网络设计,spatiotemporal 建模 和Motion feature 建模分离 比如STM 直接 Add spatio temporal feature 和 motion encoding feature TEA 的 ME 则利用了 Motion feature 做 channeI attention 过去的建模都 focus 在 framelevel motion,更好的建模方式 featurelevel motion 长时建模存在的问题: 单帧过backbone,最后的feature 进行 temporal max/average poolin...
3D Model
2026-01-11

研究动机 目前 3Dbased 的方法在大规模的 scenebased 的数据集(如kinetics)上相对于2D的方法取得了更好的效果,但是3Dbased也存在一些明显的问题: 3Dbased 的网络参数量大,计算开销大,训练的 scheduler 更长,inference latency 明显慢于 2Dbased 的方法。 3D卷积其实并不能很好得学到时序上信息的变化,而且3D卷积学出来的时序Kernel的weight的分布基本一致,更多的还是对时序上的信息做一种 smooth aggregation。这一点在之前的工作TANet 中有比较详细的讨论。也基于此,3Dbased 的网络在SomethingSomething这种对时序信息比较敏感的video数据集上并不能取得很好的效果( 得...
3D Model
2026-01-11

Classification,Detection Classification:给定预先裁剪好的视频片段,预测其所属的行为类别 Detection:视频是未经过裁剪的,需要先进行人的检测where和行为定位(分析行为的始末时间)when,再进行行为的分类what。 通常所说的行为识别更偏向于对时域预先分割好的序列进行行为动作的分类,即 Trimmed Video Action Classification。 TwoStream Twostream convolutional networks 简介 TwoStream CNN网络顾名思义分为两个部分, 1. 空间流处理RGB图像,得到形状信息; 1. 时间流/光流处理光流图像,得到运动信息。 两个流最后经过softmax后,做分类分数的融合,...
Large Model
2026-01-11

梯度检查点(Gradient Checkpointing) 大模型的参数量巨大,即使将batch_size设置为1并使用梯度累积的方式更新,也仍然会OOM。原因是通常在计算梯度时,我们需要将所有前向传播时的激活值保存下来,这消耗大量显存。 还有另外一种延迟计算的思路,丢掉前向传播时的激活值,在计算梯度时需要哪部分的激活值就重新计算哪部分的激活值,这样做倒是解决了显存不足的问题,但加大了计算量同时也拖慢了训练。 梯度检查点(Gradient Checkpointing)在上述两种方式之间取了一个平衡,这种方法采用了一种策略选择了计算图上的一部分激活值保存下来,其余部分丢弃,这样被丢弃的那一部分激活值需要在计算梯度时重新计算。 下面这个动图展示了一种简单策略:前向传播过程中计算节点的激活值并保存...
Large Model
2026-01-11
简介 基于lmmsengine中的训练时对数据packing操作以及use_rmpad消除了所有padding计算的逻辑 Packing 总体逻辑基于packing_length 将不同的数据填充到一个sequence中,具体来说 在Datsset中, 如下代码所示,将不同的数据append到buffer列表中 [代码] 在 Collator 组合成batch的形式传入到模型的输入, 这里还是将数据padding [代码] rmpad 项目中,是以 monkey patch的形式(也就是打热补丁) 替换rmpad操作的,如下代码所示,主要就是替换模型中的forward操作 [代码] Qwen3VLModel.forward 显式调用了 _unpad_input。它计算了非 padding 元...
Python
2026-01-11
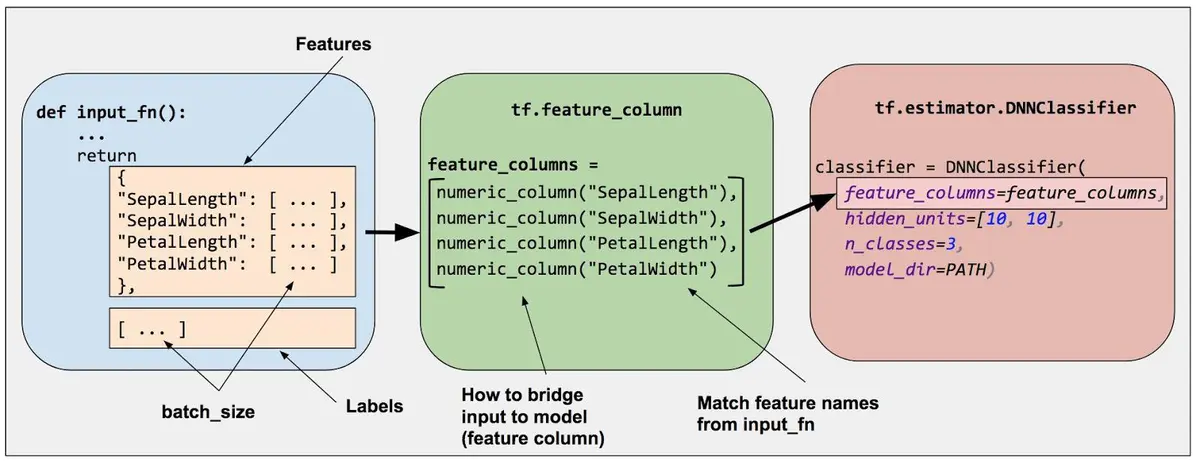
Overview 特征工程是机器学习流程中重要的一个环节,即使是通常用来做端到端学习的深度学习模型在训练之前也免不了要做一些特征工程相关的工作。Tensorflow平台提供的FeatureColumn API为特征工程提供了强大的支持。 Feature cloumns是原始数据和Estimator模型之间的桥梁,它们被用来把各种形式的原始数据转换为模型能够使用的格式。深度神经网络只能处理数值数据,网络中的每个神经元节点执行一些针对输入数据和网络权重的乘法和加法运算。然而,现实中的有很多非数值的类别数据,比如产品的品牌、类目等,这些数据如果不加转换,神经网络是无法处理的。另一方面,即使是数值数据,在仍给网络进行训练之前有时也需要做一些处理,比如标准化、离散化等。 在Tensorflow中,通过...
Python
2026-01-11
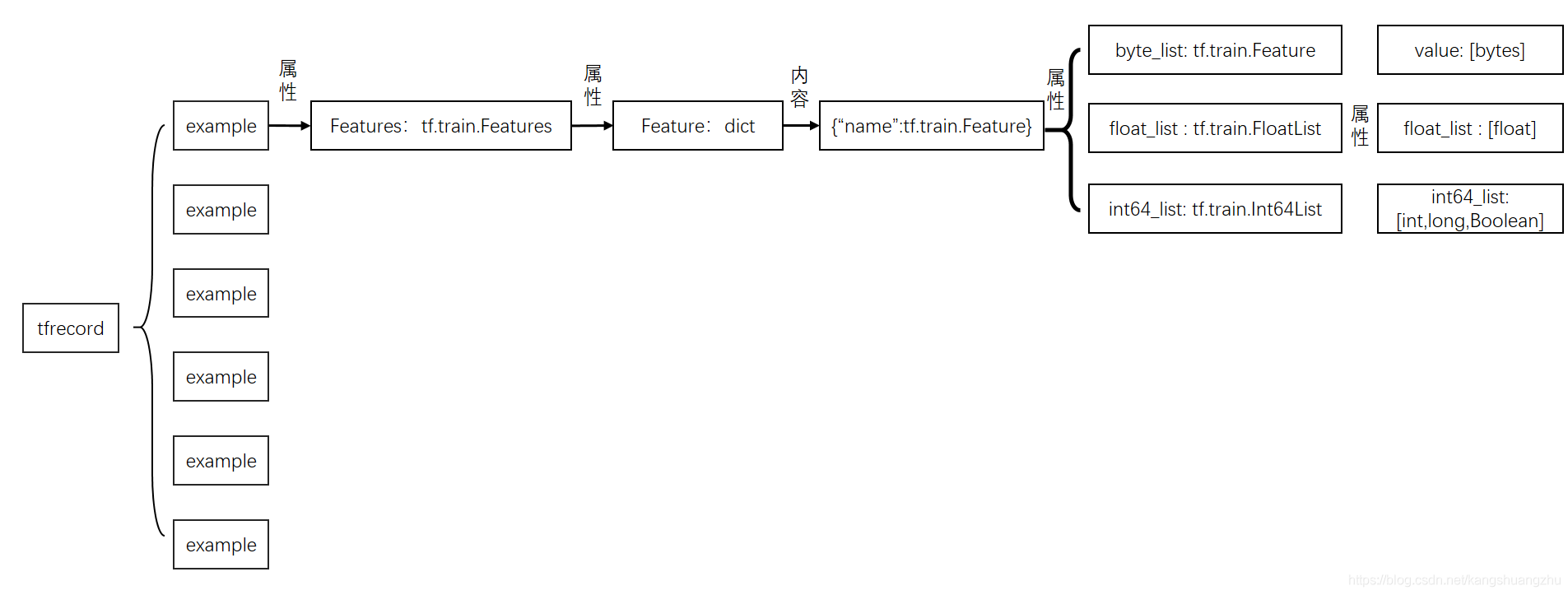
TFRecord TFRecord 是谷歌推荐的一种二进制文件格式,理论上它可以保存任何格式的信息。 tf.Example是一个Protobuffer定义的message,表达了一组string到bytes value的映射。TFRecord文件里面其实就是存储的序列化的tf.Example。关于Protobuffer参考Protobuf 终极教程。 example 我们可以具体到相关代码去详细地看下tf.Example的构成。作为一个Protobuffer message,它被定义在文件core/example/example.proto中: [代码] 只是包了一层Features的message。我们还需要进一步去查找Features的message定义: [代码] 到这里,我们可以看出...
Large Model
2026-01-11

引言与背景 FlashAttention的关键创新在于使用类似于在线Softmax的思想来对自注意力计算进行分块(tiling),从而能够融合整个多头注意力层的计算,而无需访问GPU全局内存来存储中间的logits和注意力分数 在深度学习中,Transformer模型的自注意力机制是计算密集型操作。传统实现需要在GPU全局内存中存储大量中间结果,这导致: 内存瓶颈:中间矩阵占用大量显存 I/O开销:频繁的全局内存访问降低效率 扩展性限制:难以处理超长序列 FlashAttention通过算法创新解决了这些问题。 SelfAtention 自注意力机制的计算可以总结为(为简化说明,忽略头数和批次维度,也省略注意力掩码和缩放因子 [Math] ): [公式] 其中: Q, K, V, O 都是形...
Large Model
2026-01-11

模型概述 KimiVL 是一个高效的开源混合专家视觉语言模型(VLM),它提供先进的多模态推理、长上下文理解和强大的代理能力,同时在语言解码器中仅激活 2.8B 参数(KimiVLA3B)。该模型在多种挑战性任务中表现出色,包括一般用途的视觉语言理解、多轮代理任务、大学水平的图像和视频理解、OCR、数学推理和多图像理解等. 模型架构 KimiVL 的架构由三个主要部分组成: MoE语言模型 Moonlight MoE language model with only 2.8B activated (16B total) parameters 视觉模型 400M nativeresolution MoonViT vision encoder. MLP Projector MoonViT: 原生...
Large Model
2026-01-11
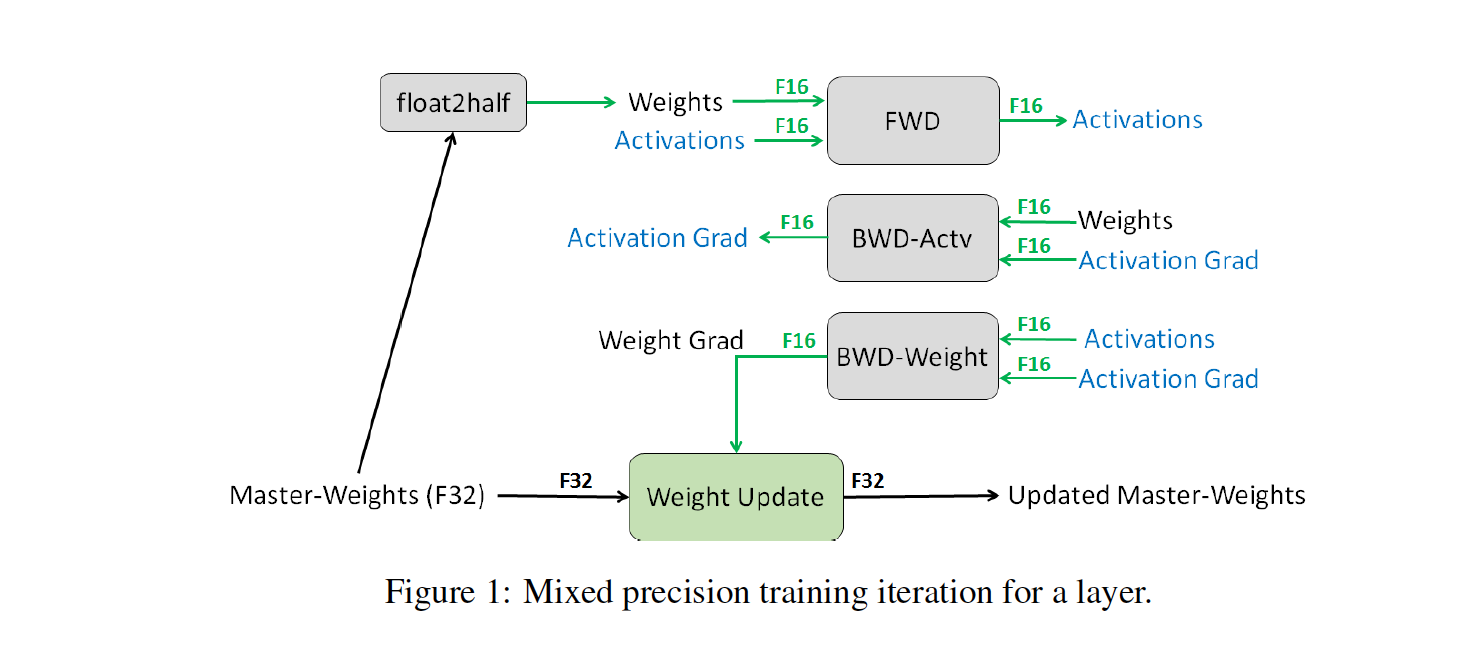
背景:大模型 vs. GPU Memory 大模型最大的特点是模型参数多,训练时需要很大的GPU显存。举个例子,帮助大家的理解:对于一个常见的7B规模参数的大模型(如LLaMA-2 7B),基于16-bit混合精度训练时,在仅考虑模型参数、梯度、优化器情况下,显存占用就有112GB,显然目前A100、H100这样主流的显卡单张是放不下的,更别提国内中小厂喜欢用的A6000/5000、甚至消费级显卡。 上面的例子中,参数占GPU 显存近 14GB(每个参数2字节)。再考虑到训练时 梯度的存储占14GB(每个参数对应一个梯度,也是2字节)、优化器Optimizer假设是用目前主流的AdamW则是8...
Large Model
2026-01-11
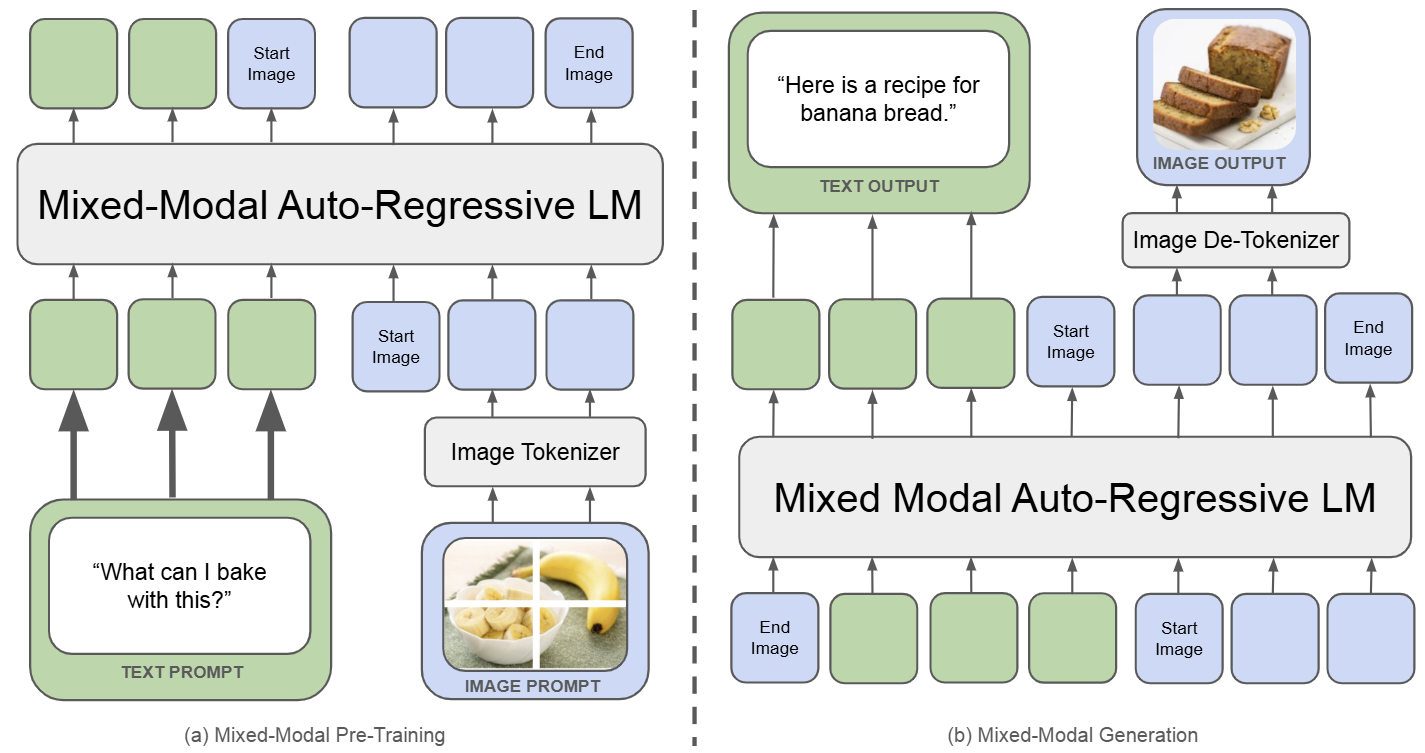
Chameleon:生成理解统一模型的开山之作 🔖 https://arxiv.org/pdf/2405.09818 Chameleon 是一个既能做图像理解,又可以做图像或者文本生成任务的,从头训练的 Transformer 模型。完整记录了为实现 mixedmodal 模型的架构设计,稳定训练方法,对齐的配方。并在一系列全面的任务上进行评估:有纯文本任务,也有图像文本任务 (视觉问答、图像字幕),也有图像生成任务,还有混合模态的生产任务。 如下图所示,Chameleon 将所有模态数据 (图像、文本和代码) 都表示为离散 token,并使用统一的 Transformer 架构。训练数据是交错混合模态数据 ∼10T token,以端到端的方式从头开始训练。文本 token 用绿色表示,图像...
Large Model
2026-01-11
🔖 https://docs.dify.ai/zhhans/gettingstarted/installselfhosted Docker 按照官方文档说明配置即可 https://docs.dify.ai/zhhans/gettingstarted/installselfhosted/dockercompose 源码安装 参考官方步骤, 需要补充一些内容 https://docs.dify.ai/zhhans/gettingstarted/installselfhosted/localsourcecode 在启动API 服务之前需要安装PostgreSQL数据库和Redis Postgres安装配置(非Root) 下载二进制编译好的安装包, 下载地址在这里 解压并创建data目录 初始化d...