
Hough Voting 本文的标题是Deep Hough Voting,先来说一下Hough Voting。 用Hough变换检测直线大家想必都听过:对于一条直线,可以使用 \((r,θ)\) 两个参数进行描述,那么对于图像中的一点,过这个点的直线有很多条,可以生成一系列的 \((r,θ)\) ,在参数平面内就是一条曲线,也就是说,一个点对应着参数平面内的一个曲线。那如果有很多个点,则会在参数平面内生成很多曲线。那么,如果这些点是能构成一条直线的,那么这条直线的参数 \((r,θ)\) 就在每条曲线中都存在,所以看起来就像是多条曲线相交在 \((r,θ)\) 。可以用多条曲线投票的方式来看,其他点都是很少的票数,而 \((r,θ)\) 则票数很多,所以直线的参数就是 \((r,θ)\) 。 所以Hough变换的思想就是在于,在参数空间内进行投票,投票得数高的就是要得到的值。 文中提到的Hough Voting如下: A traditional Hough voting 2D detector comprises an offline and an online step....
泊松分布 日常生活中,大量事件是有固定频率的。 某医院平均每小时出生3个婴儿 某公司平均每10分钟接到1个电话 某超市平均每天销售4包xx牌奶粉 某网站平均每分钟有2次访问 它们的特点就是,我们可以预估这些事件的总数,但是没法知道具体的发生时间。已知平均每小时出生3个婴儿,请问下一个小时,会出生几个? 有可能一下子出生6个,也有可能一个都不出生。这是我们没法知道的。 泊松分布就是描述某段时间内,事件具体的发生概率。 \[P(N(t)=n)=\frac{(\lambda t)^n e^{-\lambda t}}{n!}\] 上面就是泊松分布的公式。等号的左边, \(P\) 表示概率, \(N\) 表示某种函数关系, \(t\) 表示时间, \(n\) 表示数量,1小时内出生3个婴儿的概率,就表示为 \(P(N(1) = 3)\) 。等号的右边,参数λ是单位时间(或单位面积)内随机事件的平均发生率。 接下来两个小时,一个婴儿都不出生的概率是0.25%,基本不可能发生。 \[P(N(2) = 0) = \frac{(3 \times 2)^0 e^{-3 \times 2}}{0!}...
基本概念 方向导数:是一个数;反映的是 \(f(x,y)\) 在 \(P_0\) 点沿方向 \(v\) 的变化率。 偏导数:是多个数(每元有一个);是指多元函数沿坐标轴方向的 方向导数 ,因此二元函数就有两个偏导数。 偏导函数:是一个函数;是一个关于点的偏导数的函数。 梯度:是一个向量;每个元素为函数对一元变量的偏导数;它既有大小(其大小为最大方向导数),也有方向。 方向导数 反映的是 \(f(x,y)\) 在 \(P_0\) 点沿方向 \(v\) 的变化率。 例子如下: 题目 设二元函数 \( f(x, y) = x^2 + y^2\) ,分别计算此函数在点 \((1, 2)\) 沿方向 \(w=\{3, -4\}\) 与方向 \(u=\{1, 0\}\) 的方向导数。 解: 由于 \(w\) 不是单位向量,因此首先应对其进行单位化: \[v = w^0 = \frac{w}{|w|} = \left\{ \frac{3}{5}, -\frac{4}{5} \right\}\] 计算函数增量: \[\begin{aligned}
\therefore f(x_0 + tv_1,...
NLP
2026-04-15

取代RNN——Transformer 在介绍Transformer前我们来回顾一下RNN的结构 对RNN有一定了解的话,一定会知道,RNN有两个很明显的问题 效率问题:需要逐个词进行处理,后一个词要等到前一个词的隐状态输出以后才能开始处理 如果传递距离过长还会有梯度消失、梯度爆炸和遗忘问题 为了缓解传递间的梯度和遗忘问题,设计了各种各样的RNN cell,最著名的两个就是LSTM和GRU了 LSTM (Long Short Term Memory) GRU (Gated Recurrent Unit) 但是,引用网上一个博主的比喻,这么做就像是在给马车换车轮,为什么不直接换成汽车呢? 于是就有了 Transformer 。Transformer 是Google Brain 2017的提出的一篇工作,它针对RNN的弱点进行重新设计,解决了RNN效率问题和传递中的缺陷等,在很多问题上都超过了RNN的表现。Transfromer的基本结构如下图所示,...
Large Model
2026-04-15

梯度检查点(Gradient Checkpointing) 大模型的参数量巨大,即使将batch_size设置为1并使用梯度累积的方式更新,也仍然会OOM。原因是通常在计算梯度时,我们需要将所有前向传播时的激活值保存下来,这消耗大量显存。 还有另外一种延迟计算的思路, 丢掉前向传播时的激活值,在计算梯度时需要哪部分的激活值就重新计算哪部分的激活值,这样做倒是解决了显存不足的问题,但加大了计算量同时也拖慢了训练 。 梯度检查点(Gradient Checkpointing)在上述两种方式之间取了一个平衡,这种方法采用了一种策略 选择了计算图上的一部分激活值保存下来,其余部分丢弃,这样被丢弃的那一部分激活值需要在计算梯度时重新计算 。 下面这个动图展示了一种简单策略:前向传播过程中计算节点的激活值并保存,计算下一个节点完成后丢弃中间节点的激活值,反向传播时如果有保存下来的梯度就直接使用,如果没有就使用保存下来的前一个节点的梯度重新计算当前节点的梯度再使用。 Transformer框架开启梯度检查点非常简单,仅需在TrainingArguments中指定gradient...
问题表示 有很多概率问题,尤其是独立重复实验问题,如果用生成函数的方法来做,会显得特别方便。本文要讲的“随机游走”问题便是其中一例,它又被形象地叫做“醉汉问题”,其本质上是一个二项分布,但是由于取了极限,出现了很多新的性质和应用。我们先考虑如下问题: 考虑实数轴上的一个粒子,在 \(t=0\) 时刻它位于原点,每过一秒,它要不向前移动一格( \(+1\) ),要不就向后移动一格( \(-1\) ),问 \(n\) 秒后它所处位置的概率分布。 不难发现,这个问题跟二项分布是雷同的。如果把这个粒子形象比喻成一个“喝醉酒的人”,那么上面的走法就类似于一个完全不省人事的醉汉走路问题了。(当然,醉汉是在三维空间走路的,这里简单起见,只描述了一维的。)这是一个独立重复实验,每秒的行走可用函数描述为 \(\frac{1}{2}(z+z^{-1})\) ,于是 \(n\) 秒后的运动分布情况可以用 \[\frac{1}{2^n}(z+z^{-1})^n\] 来描述, \(z^i(i=-n,-n+1,\dots,n-1,n)\) 的系数表示粒子位于 \(i\) 的概率。 💡...
Generative Model
2026-04-15

SD模型原理 SD是CompVis、Stability AI和LAION等公司研发的一个文生图模型,它的模型和代码是开源的,而且训练数据LAION-5B也是开源的。SD在开源90天github仓库就收获了 33K的stars ,可见这个模型是多受欢迎。 SD是一个 基于latent的扩散模型 ,它在UNet中引入text condition来实现基于文本生成图像。SD的核心来源于 Latent Diffusion 这个工作,常规的扩散模型是基于pixel的生成模型,而Latent Diffusion是基于latent的生成模型,它先采用一个autoencoder将图像压缩到latent空间,然后用扩散模型来生成图像的latents,最后送入autoencoder的decoder模块就可以得到生成的图像。 基于latent的扩散模型的优势在于计算效率更高效,因为图像的latent空间要比图像pixel空间要小,这也是SD的核心优势...
Math
2026-04-15

引言与背景 随机逼近(Stochastic Approximation)是一类用于求解寻根或优化问题的随机迭代算法,其特点是不需要知道目标函数或其导数的表达式。 随机逼近的核心优势在于: 能够处理带有随机噪声的观测数据 不需要目标函数的解析表达式 可以在线学习,每获得一个新样本就更新估计值 均值估计问题 考虑一个随机变量 \(X\) ,其取值来自有限集合 \(\mathcal{X}\) 。我们的目标是估计 \(E[X]\) 。假设我们有一个独立同分布的样本序列 \(\{x_i\}_{i=1}^n\) ,那么 \(X\) 的期望值可以近似为: \[E[X] \approx \bar{x} = \frac{1}{n}\sum_{i=1}^n x_i\] 非增量方法与增量方法 非增量方法 :先收集所有样本,然后计算平均值。缺点是如果样本数量很大,可能需要等待很长时间。 增量方法 :定义 \[w_{k+1} = \frac{1}{k}\sum_{i=1}^k x_i, k = 1, 2, ...\] 可以推导出递归公式: \[{w}_{k + 1} =...
Large Model
2026-04-15

简介 24年12月,研究团队开发了 DeepSeek-V3,这是一个基于 MoE 架构的大模型,总参数量达到 671B,其中每个 token 会激活 37B 个参数。 基于提升性能和降低成本的双重目标,在架构设计方面,DeepSeek-V3 采用了 MLA 来确保推理效率,并使用 DeepSeekMoE 来实现经济高效的训练。这两种架构在 DeepSeek-V2 中已经得到验证,证实了它们能够在保持模型性能的同时实现高效的训练和推理。 除了延续这些基础架构外,研究团队还引入了两项创新策略来进一步提升模型性能。 首先,DeepSeek-V3 首创了 无辅助损失的负载均衡 策略(auxiliary-loss-free strategy for load balancing),有效降低了负载均衡对模型性能的负面影响。另外,DeepSeek-V3 采用了 多 token 预测训练目标, 这种方法在评估基准测试中展现出了显著的性能提升。 为了提高训练效率,该研究采用了 FP8 混合精度训练技术...
Large Model
2026-04-15
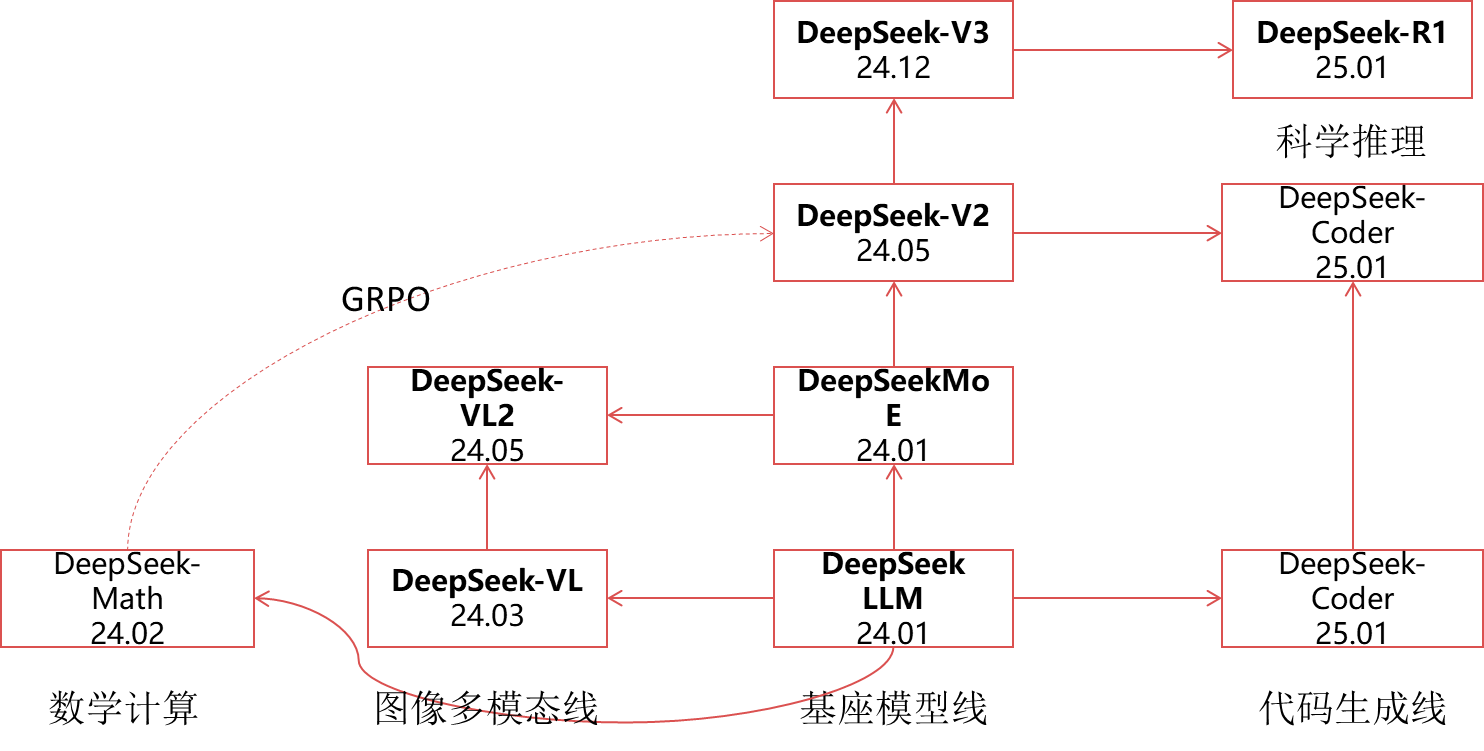
https://www.deepseek.com/ DeepSeek LLM 代码地址: https://github.com/deepseek-ai/DeepSeek-LLM 背景 量化巨头幻方探索AGI(通用人工智能)新组织“深度求索”在成立半年后,发布的第一代大模型,免费商用,完全开源。作为一家隐形的AI巨头,幻方拥有1万枚英伟达A100芯片,有手撸的HAI-LLM训练框架HAI-LLM:高效且轻量的大模型训练工具。 概述 DeepSeek LLMs,这是一系列在2万亿标记的英语和中文大型数据集上从头开始训练的开源模型 在本文中,深入解释了超参数选择、Scaling Laws以及做过的各种微调尝试。校准了先前工作中的Scaling Laws,并提出了新的最优模型/数据扩展-缩放分配策略。此外,还提出了一种方法,使用给定的计算预算来预测近似的batch-size和learning-rate。进一步得出结论,Scaling Laws与数据质量有关,这可能是不同工作中不同扩展行为的原因。在Scaling Laws的指导下,使用最佳超参数进行预训练,并进行全面评估。...
NLP
2026-04-15

Attention 当前最流行的Attention机制当属 Scaled-Dot Attention,形式为 \[Attention(\boldsymbol{Q},\boldsymbol{K},\boldsymbol{V}) = softmax\left(\boldsymbol{Q}\boldsymbol{K}^{\top}\right)\boldsymbol{V}\tag{1}\] 这里的 \(\boldsymbol{Q}\in\mathbb{R}^{n\times d_k}, \boldsymbol{K}\in\mathbb{R}^{m\times d_k}, \boldsymbol{V}\in\mathbb{R}^{m\times d_v}\) ,简单起见我们就没显式地写出Attention的缩放因子了。本文我们主要关心Self Attention场景,所以为了介绍上的方便统一设 \(\boldsymbol{Q}, \boldsymbol{K}, \boldsymbol{V}\in\mathbb{R}^{n\times d}\) ,一般场景下都有 \(n > d\) 甚至...
Attention 当前最流行的Attention机制当属 Scaled-Dot Attention,形式为 \[\begin{equation}Attention(\boldsymbol{Q},\boldsymbol{K},\boldsymbol{V}) = softmax\left(\boldsymbol{Q}\boldsymbol{K}^{\top}\right)\boldsymbol{V}\tag{1}\end{equation}\] 这里的 \(\boldsymbol{Q}\in\mathbb{R}^{n\times d_k}, \boldsymbol{K}\in\mathbb{R}^{m\times d_k}, \boldsymbol{V}\in\mathbb{R}^{m\times d_v}\) ,简单起见我们就没显式地写出Attention的缩放因子了。本文我们主要关心Self Attention场景,所以为了介绍上的方便统一设 \(\boldsymbol{Q}, \boldsymbol{K}, \boldsymbol{V}\in\mathbb{R}^{n\times...