问题表示 有很多概率问题,尤其是独立重复实验问题,如果用生成函数的方法来做,会显得特别方便。本文要讲的“随机游走”问题便是其中一例,它又被形象地叫做“醉汉问题”,其本质上是一个二项分布,但是由于取了极限,出现了很多新的性质和应用。我们先考虑如下问题: 考虑实数轴上的一个粒子,在 \(t=0\) 时刻它位于原点,每过一秒,它要不向前移动一格( \(+1\) ),要不就向后移动一格( \(-1\) ),问 \(n\) 秒后它所处位置的概率分布。 不难发现,这个问题跟二项分布是雷同的。如果把这个粒子形象比喻成一个“喝醉酒的人”,那么上面的走法就类似于一个完全不省人事的醉汉走路问题了。(当然,醉汉是在三维空间走路的,这里简单起见,只描述了一维的。)这是一个独立重复实验,每秒的行走可用函数描述为 \(\frac{1}{2}(z+z^{-1})\) ,于是 \(n\) 秒后的运动分布情况可以用 \[\frac{1}{2^n}(z+z^{-1})^n\] 来描述, \(z^i(i=-n,-n+1,\dots,n-1,n)\) 的系数表示粒子位于 \(i\) 的概率。 💡...
Math
2026-04-15

引言与背景 随机逼近(Stochastic Approximation)是一类用于求解寻根或优化问题的随机迭代算法,其特点是不需要知道目标函数或其导数的表达式。 随机逼近的核心优势在于: 能够处理带有随机噪声的观测数据 不需要目标函数的解析表达式 可以在线学习,每获得一个新样本就更新估计值 均值估计问题 考虑一个随机变量 \(X\) ,其取值来自有限集合 \(\mathcal{X}\) 。我们的目标是估计 \(E[X]\) 。假设我们有一个独立同分布的样本序列 \(\{x_i\}_{i=1}^n\) ,那么 \(X\) 的期望值可以近似为: \[E[X] \approx \bar{x} = \frac{1}{n}\sum_{i=1}^n x_i\] 非增量方法与增量方法 非增量方法 :先收集所有样本,然后计算平均值。缺点是如果样本数量很大,可能需要等待很长时间。 增量方法 :定义 \[w_{k+1} = \frac{1}{k}\sum_{i=1}^k x_i, k = 1, 2, ...\] 可以推导出递归公式: \[{w}_{k + 1} =...
Large Model
2026-04-15

简介 24年12月,研究团队开发了 DeepSeek-V3,这是一个基于 MoE 架构的大模型,总参数量达到 671B,其中每个 token 会激活 37B 个参数。 基于提升性能和降低成本的双重目标,在架构设计方面,DeepSeek-V3 采用了 MLA 来确保推理效率,并使用 DeepSeekMoE 来实现经济高效的训练。这两种架构在 DeepSeek-V2 中已经得到验证,证实了它们能够在保持模型性能的同时实现高效的训练和推理。 除了延续这些基础架构外,研究团队还引入了两项创新策略来进一步提升模型性能。 首先,DeepSeek-V3 首创了 无辅助损失的负载均衡 策略(auxiliary-loss-free strategy for load balancing),有效降低了负载均衡对模型性能的负面影响。另外,DeepSeek-V3 采用了 多 token 预测训练目标, 这种方法在评估基准测试中展现出了显著的性能提升。 为了提高训练效率,该研究采用了 FP8 混合精度训练技术...
Large Model
2026-04-15

CLIP算法原理 CLIP 不预先定义图像和文本标签类别,直接利用从互联网爬取的 400 million 个image-text pair 进行图文匹配任务的训练,并将其成功迁移应用于30个现存的计算机视觉分类。简单的说,CLIP 无需利用 ImageNet 的数据和标签进行训练,就可以达到 ResNet50 在 ImageNet数据集上有监督训练的结果,所以叫做 Zero-shot。 CLIP(contrastive language-image pre-training)主要的贡献就是 利用无监督的文本信息,作为监督信号来学习视觉特征 。 CLIP 作者先是回顾了并总结了和上述相关的两条表征学习路线: 构建image和text的联系,比如利用已有的image-text pair数据集,从text中学习image的表征; 获取更多的数据(不要求高质量,也不要求full...
Large Model
2026-04-15
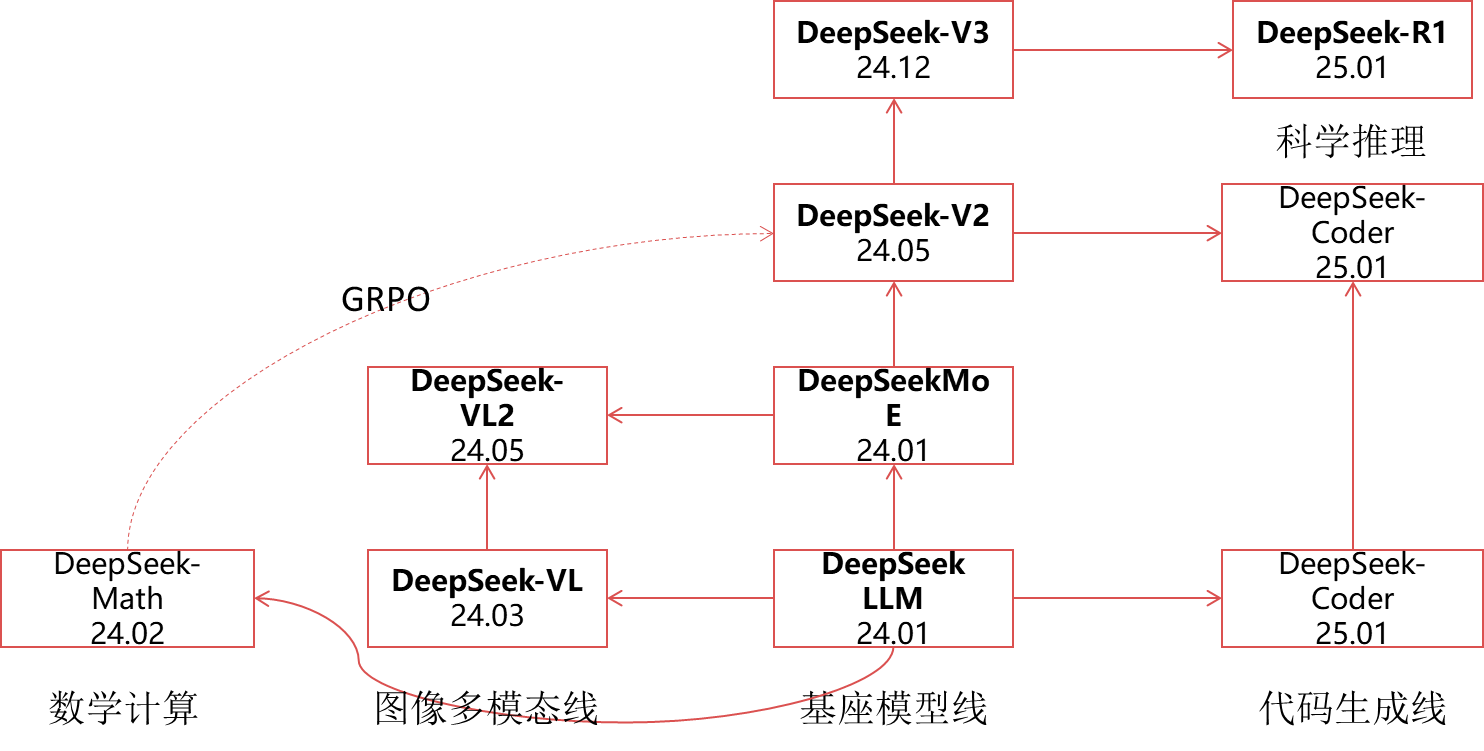
https://www.deepseek.com/ DeepSeek LLM 代码地址: https://github.com/deepseek-ai/DeepSeek-LLM 背景 量化巨头幻方探索AGI(通用人工智能)新组织“深度求索”在成立半年后,发布的第一代大模型,免费商用,完全开源。作为一家隐形的AI巨头,幻方拥有1万枚英伟达A100芯片,有手撸的HAI-LLM训练框架HAI-LLM:高效且轻量的大模型训练工具。 概述 DeepSeek LLMs,这是一系列在2万亿标记的英语和中文大型数据集上从头开始训练的开源模型 在本文中,深入解释了超参数选择、Scaling Laws以及做过的各种微调尝试。校准了先前工作中的Scaling Laws,并提出了新的最优模型/数据扩展-缩放分配策略。此外,还提出了一种方法,使用给定的计算预算来预测近似的batch-size和learning-rate。进一步得出结论,Scaling Laws与数据质量有关,这可能是不同工作中不同扩展行为的原因。在Scaling Laws的指导下,使用最佳超参数进行预训练,并进行全面评估。...
Large Model
2026-04-15

k1.5—CoT强化训练 概述 Kimi k1.5采用了一种简化而有效的强化学习框架,其核心在于长上下文扩展和改进的策略优化方法,而不依赖于更复杂的技术如蒙特卡洛树搜索、价值函数和过程奖励模型。 问题设定 给定训练数据集 \(D = \{(x_i, y^*_i)\}_{i=1}^n\) ,其中包含问题 \(x_i\) 和对应的真实答案 \(y^*_i\) ,目标是训练一个策略模型 \(\pi_\theta\) 来准确解决测试问题。在复杂推理场景中,思维链(CoT)方法提出使用一系列中间步骤 \(z = (z_1, z_2, ..., z_m)\) 来连接问题 \(x\) 和答案 \(y\) ,每个 \(z_i\) 是解决问题的重要中间步骤。 当解决问题 \(x\) 时,思维 \(z_t \sim \pi_\theta(\cdot|x, z_1, ..., z_{t-1})\) 被自回归采样,最终答案 \(y \sim \pi_\theta(\cdot|x, z_1, ..., z_m)\) 。 强化学习目标 基于真实答案 \(y^*\) ,分配一个值 \(r(x, y, y^*)...
Large Model
2026-04-15
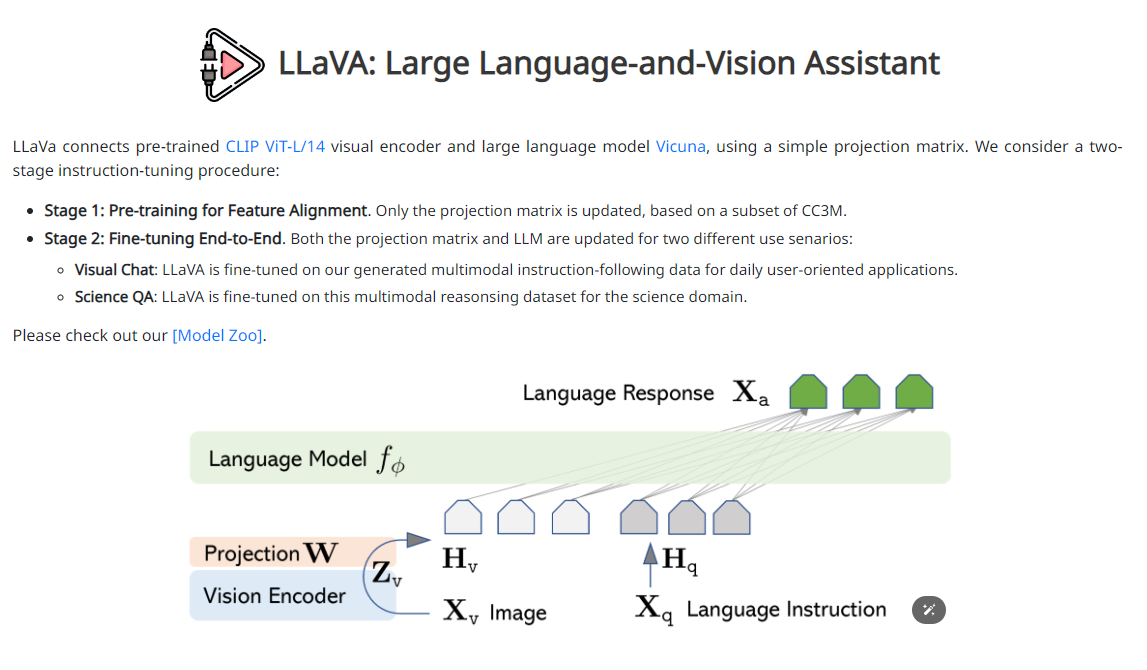
项目: https://llava-vl.github.io/ github: https://github.com/haotian-liu/LLaVA 一句话 优点 : 极大简化了VLM的训练方式:Pre-training + Instruction Tuning 训练量得到简化:1M量级数据+ 8卡A100 → 一天完成训练 LLaVA LLaVA是2023的连续工作,包含了LLaVA 1.0, 1.5, 1.6几个版本(后续会有更多),也是2023年多模态领域妥妥的顶流。发表9个月620的stars,GitHub超过12K的stars。 LLaVA它的网络结构简单、微调成本比较低,任何研究组、企业甚至个人都可以基于它构建自己的领域的多模态模型。 非常建议对多模态大模型感兴趣的朋友关注LLaVA这篇工作。 简介...
NLP
2026-04-15
概述 HiPPO(High-order Polynomial Projection Operators)是目前大热的structured state space model (S4)及其后续工作的backbone. State space mode主要是控制学科里的内容,最近被引入深度学习领域来解决长距离依赖问题。长距离依赖建模的核心问题是如何通过有限的memory来尽可能记住之前所有的历史信息。当前的主流序列建模模型(即Transformer和RNN) 存在着普遍的遗忘问题 fixed-size context windows: Transformer的window size通常是有限的,一般来说quadratic的attention最多建模到大约10k的token就到计算极限了 vanishing gradient: RNN通过hidden state来存储历史信息,理论上能记住之前所有内容,但实际上的effective memory大概是<1k个token的level,可能的原因是gradient vanishing HiPPO 通过数学方法分析来得到closed-form...
Large Model
2026-04-15

问题背景 首先简化一下问题,本文所讨论的多模态,主要指图文混合的双模态,即输入和输出都可以是图文。可能有不少读者的第一感觉是:多模态模型难道不也是烧钱堆显卡,Transformer“一把梭”,最终“大力出奇迹”吗? 其实没那么简单。先看文本生成,事实上文本生成自始至终都只有一条主流路线,那就是语言模型,即建模条件概率 \(p(x_t|x_1,\cdots,x_{t-1})\) ,不论是最初的 n-gram语言模型,还是后来的Seq2Seq、GPT,都是这个条件概率的近似。也就是说,一直以来,人们对“实现文本生成需要往哪个方向走”是很明确的,只是背后所用的模型有所不同,比如LSTM、CNN、Attention乃至最近复兴的线性RNN等。所以, 文本生成确实可以All in Transformer来大力出奇迹,因为方向是标准的、清晰的。 然而,对于图像生成,并没有这样的“标准方向”。就本站所讨论过的图像生成模型,就有 VAE 、 GAN 、 Flow 、 Diffusion ,还有小众的 EBM...
Large Model
2026-04-15
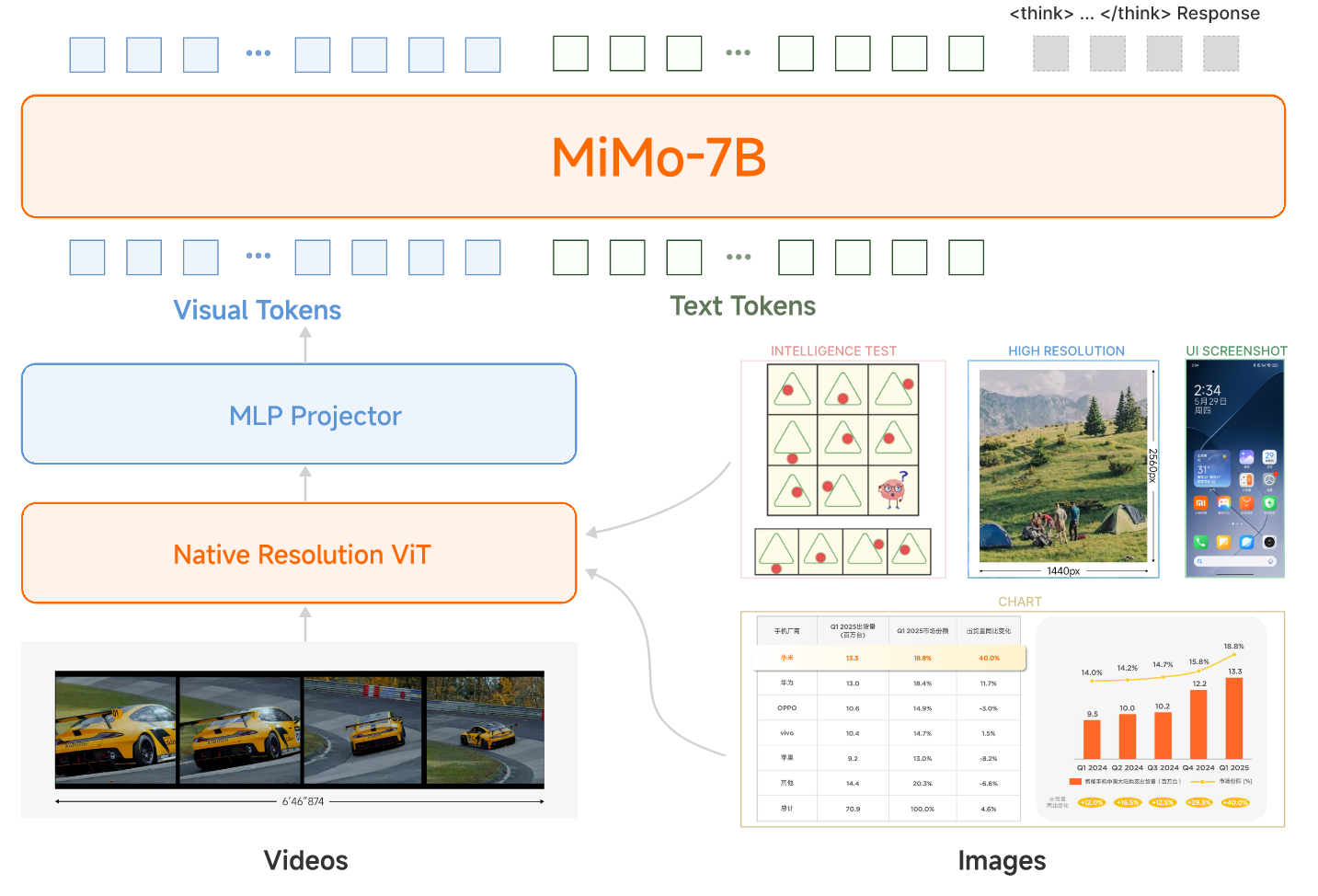
概述 小米团队近日发布了MIMO-VL-7B-SFT和MIMO-VL-7B-RL,这是两个强大的视觉语言模型,MIMO-VL-7B-RL在40个评估任务中的35个上优于QWEN2.5-VL-7B,对于GUI Grounding任务,它在OSWorld-G上设置了一个新标准,甚至超过了UI-TARS等专业模型。模型通过四个阶段的预训练(2.4T Token)与Mixed On-policy 强化(MORL)整合了多样化的奖励信号。 在文章中,作者提到了两个重要的发现: 从Pre-Traing 训练阶段中加入高质量且覆盖广的推理数据对于强化模型性能至关重要。 Mixed On-policy 强化学习进一步增强了模型的性能,同时实现了稳定的同时改进仍然在性能方面具有挑战性。 Pre-Training 模型结构 整个模型还是采用了VIT-MLP-LLM的结构,具体来说,视觉模型采用了Qwen2.5-VL中的视觉encoder,LLM采用了自家的语言模型MiMo-7B-Base。 整个Pretraining采用了四个阶段的训练,每个阶段采用的数据,模型训练参数和模型参数如下面两表所示...
Large Model
2026-04-15
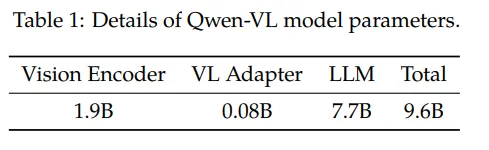
Qwen-VL系列 Qwen-VL 阿里巴巴的Qwen-VL是另一个比较经典的模型,十分值得作为案例介绍多模态大模型的训练要点。Qwen-VL使用Qwen-7B LLM作为语言模型基座,Openclip预训练的ViT-bigG作为视觉特征Encoder,随机初始化的单层Cross-Attention模块作为视觉和自然语言的的Adapter,总参数大小约9.6B。 如下图,Qwen-VL的训练过程分为三个阶段: Stage1 为预训练,目标是使用大量的图文Pair对数据对齐视觉模块和LLM的特征,这个阶段冻结LLM模块的参数; Stage2 为多任务预训练,使用更高质量的图文多任务数据(主要来源自开源VL任务,部分自建数据集),更高的图片像素输入,全参数训练; Stage3 为指令微调阶段,这个阶段冻结视觉Encoder模块,使用的数据主要来自大模型Self-Instruction方式自动生成,目标是提升模型的指令遵循和多轮对话能力。...