
11. 盛最多水的容器 题目 给定一个长度为 n 的整数数组 height 。有 n 条垂线,第 i 条线的两个端点是 (i, 0) 和 (i, height[i]) 。 找出其中的两条线,使得它们与 x 轴共同构成的容器可以容纳最多的水。 返回容器可以储存的最大水量。 说明: 你不能倾斜容器。 示例 1: 输入:[1,8,6,2,5,4,8,3,7]
输出:49
解释:图中垂直线代表输入数组 [1,8,6,2,5,4,8,3,7]。在此情况下,容器能够容纳水(表示为蓝色部分)的最大值为 49。 示例 2: 输入:height = [1,1]
输出:1 提示: n == height.length 2 <= n <= 10 5 0 <= height[i] <= 10 4 题解 在初始时,左右指针分别指向数组的左右两端,它们可以容纳的水量为 \(min(1,7)∗8=8\) 。 此时我们需要移动一个指针。移动哪一个呢?直觉告诉我们,应该移动对应数字较小的那个指针(即此时的左指针)。这是因为,由于容纳的水量是由 两个指针指向的数字中较小值∗指针之间的距离...
Large Model
2026-01-23
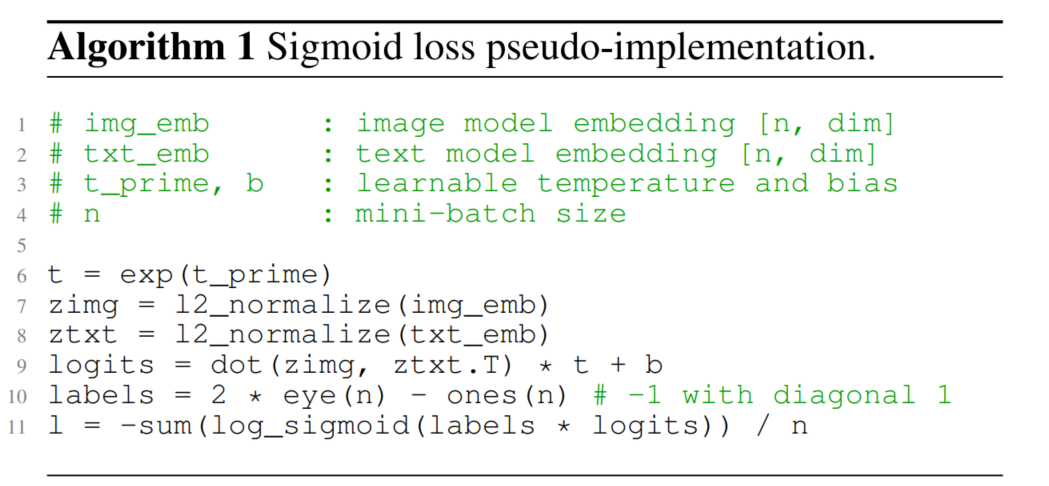
SigLIP 概述 CLIP自提出以来在zero-shot分类、跨模态搜索、多模态对齐等多个领域得到广泛应用。得益于其令人惊叹的能力,激起了研究者广泛的关注和优化。 目前对CLIP的优化主要可以分为两大类: 其一是如何降低CLIP的训练成本; 其二是如何提升CLIP的performance。 对于第一类优化任务的常见思路有3种。 优化训练架构,如 LiT 通过freezen image encoder,单独训练text encoder来进行text 和image的对齐来加速训练; 减少训练token,如 FLIP 通过引入视觉mask,通过只计算非mask区域的视觉表征来实现加速(MAE中的思路) 优化目标函数,如 CatLIP 将caption转为class label,用分类任务来代替对比学习任务来实现加速。 对于第二类提升CLIP的performance最常用和有效的手段就是数据治理,即构建高质量、大规模、高多样性的图文数据,典型的工作如:DFN。 SigLIP这篇paper 提出用sigmoid...
Large Model
2026-01-22
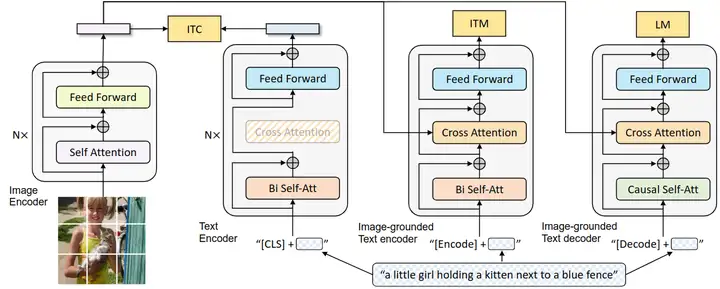
BLIP 论文名称 :BLIP: Bootstrapping Language-Image Pre-training for Unified Vision-Language Understanding and Generation (ICML 2022) 论文地址: https://arxiv.org/pdf/2201.12086.pdf 代码地址: https://github.com/salesforce/BLIP 官方解读博客: https://blog.salesforceairesearch.com/blip-bootstrapping-language-image-pretraining/ 背景和动机 视觉语言训练 (Vision-Language Pre-training, VLP) 最近在各种多模态下游任务上取得了巨大的成功。然而,现有方法有两个主要限制: 模型层面: 大多数现有的预训练模型仅在基于理解的任务或者基于生成的任务方面表现出色,很少有可以兼顾的模型。比如,基于编码器的模型,像 CLIP,ALBEF 不能直接转移到文本生成任务...
Large Model
2026-01-22

CLIP算法原理 CLIP 不预先定义图像和文本标签类别,直接利用从互联网爬取的 400 million 个image-text pair 进行图文匹配任务的训练,并将其成功迁移应用于30个现存的计算机视觉分类。简单的说,CLIP 无需利用 ImageNet 的数据和标签进行训练,就可以达到 ResNet50 在 ImageNet数据集上有监督训练的结果,所以叫做 Zero-shot。 CLIP(contrastive language-image pre-training)主要的贡献就是 利用无监督的文本信息,作为监督信号来学习视觉特征 。 CLIP 作者先是回顾了并总结了和上述相关的两条表征学习路线: 构建image和text的联系,比如利用已有的image-text pair数据集,从text中学习image的表征; 获取更多的数据(不要求高质量,也不要求full...
Deep Learning
2026-01-22

文章从连续情形出发开始介绍重参数,主要的例子是正态分布的重参数;然后引入离散分布的重参数,这就涉及到了Gumbel Softmax,包括Gumbel Softmax的一些证明和讨论;最后再讲讲重参数背后的一些故事,这主要跟梯度估计有关。 基本概念 重参数(Reparameterization) 实际上是处理如下期望形式的目标函数的一种技巧: \[L_{\theta}=\mathbb{E}_{z\sim p_{\theta}(z)}[f(z)]\tag{1}\] 这样的目标在VAE中会出现,在文本GAN也会出现,在强化学习中也会出现( \(f(z)\) 对应于奖励函数),所以深究下去,我们会经常碰到这样的目标函数。取决于 \(z\) 的连续性,它对应不同的形式: \[\int p_{\theta}(z) f(z)dz\,\,\,\text{(连续情形)}\qquad\qquad \sum_{z} p_{\theta}(z) f(z)\,\,\,\text{(离散情形)}\tag{2}\] 当然,离散情况下我们更喜欢将记号 \(z\) 换成 \(y\) 或者 \(c\) 。 为了最小化...
Deep Learning
2026-01-11
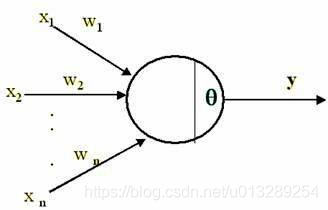
1.深度学习偏置的作用? 我们在学深度学习的时候,最早接触到的神经网络应该属于感知器(感知器本身就是一个很简单的神经网络,也许有人认为它不属于神经网络,当然认为它和神经网络长得像也行) 要想激活这个感知器,使得 y=1 ,就必须使 x_1w_1 + x_2w_2 +....+x_nw_n T ( T 为一个阈值),而 T 越大,想激活这个感知器的难度越大,人工选择一个阈值并不是一个好的方法,因为样本那么多,我不可能手动选择一个阈值,使得模型整体表现最佳,那么我们可以使得T变成可学习的,这样一来, T 会自动学习到一个数,使得模型的整体表现最佳。当把T移动到左边,它就成了偏置, x_1w_1 + x_2w_2 +....+x_nw_n T 0 xw +b 0 ,总之,偏置的大小控制着激活这个感...
Deep Learning
2026-01-11
一般来说,神经网络处理的东西都是连续的浮点数,标准的输出也是连续型的数字。但实际问题中,我们很多时候都需要一个离散的结果,比如分类问题中我们希望输出正确的类别,“类别”是离散的,“类别的概率”才是连续的;又比如我们很多任务的评测指标实际上都是离散的,比如分类问题的正确率和F1、机器翻译中的BLEU,等等。 还是以分类问题为例,常见的评测指标是正确率,而常见的损失函数是交叉熵。交叉熵的降低与正确率的提升确实会有一定的关联,但它们不是绝对的单调相关关系。换句话说,交叉熵下降了,正确率不一定上升。显然,如果能用正确率的相反数做损失函数,那是最理想的,但正确率是不可导的(涉及到 [Math] 等操作),所以没法直接用。 这时候一般有两种解决方案;一是动用强化学习,将正确率设为奖励函数,这是“用牛刀杀...
Deep Learning
2026-01-11
如何计算RF 公式一:这个算法从top往下层层迭代直到追溯回input image,从而计算出RF。 [公式] 其中,RF是感受野。RF和RF有点像,N代表 neighbour,指的是第n层的 a feature在n1层的RF,记住N_RF只是一个中间变量,不要和RF混淆。 stride是步长,ksize是卷积核大小。
Computer Vision
2026-01-11
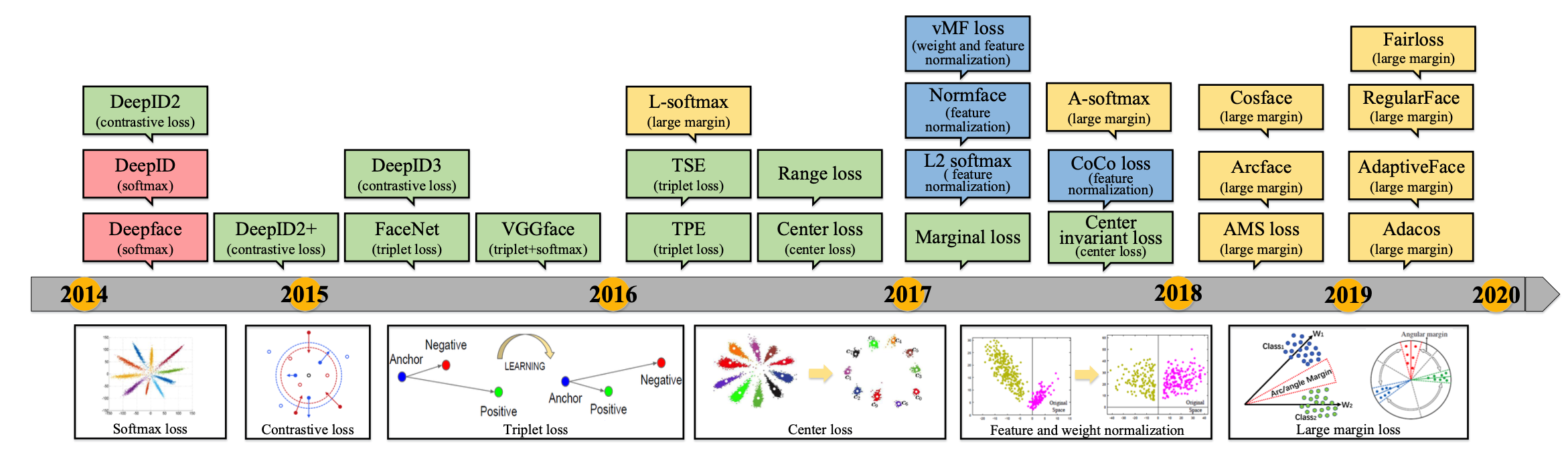
超多分类的Softmax 2014年CVPR两篇超多分类的人脸识别论文:DeepFace和DeepID DeepFace Taigman Y, Yang M, Ranzato M A, et al. Deepface: Closing the gap to humanlevel performance in face verification [C]// CVPR, 2014. 4.4M训练集,训练6层CNN + 4096特征映射 + 4030类Softmax,综合如3D Aligement, model ensembel等技术,在LFW上达到97.35%。 DeepID Sun Y, Wang X, Tang X. Deep learning face representation fro...
Computer Vision
2026-01-11
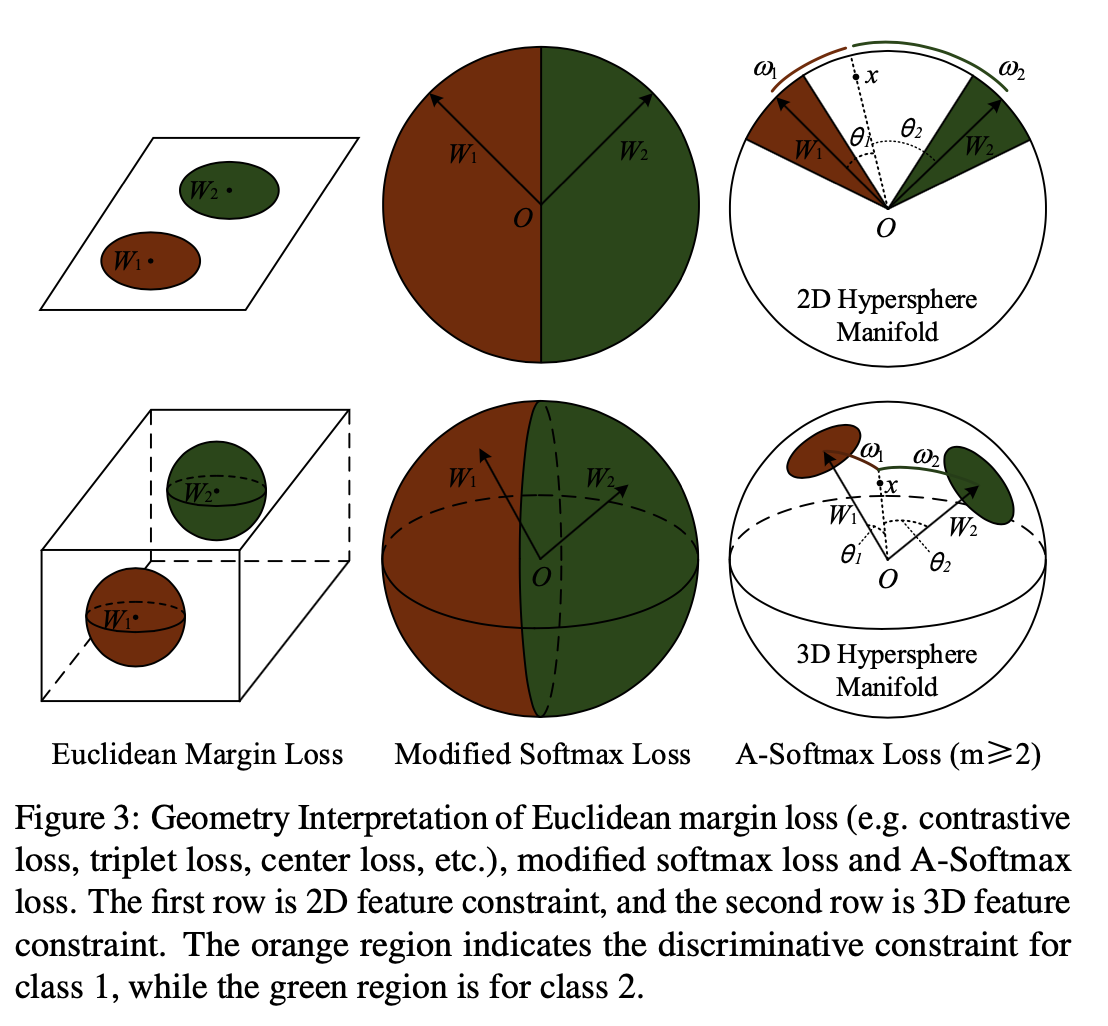
推导 回顾一下二分类下的Softmax后验概率,即: [公式] 显然决策的分界在当 𝑝_1=𝑝_2 时,所以决策界面是 (𝑊_1−𝑊_2)𝑥+𝑏_1−𝑏_2=0 。我们可以将 𝑊^𝑇_𝑖𝑥+𝑏_𝑖 写成 ‖W_i^T‖⋅‖x‖cos(θ_i)+b_i ,其中 θ_i 是 W_i 与 x 的夹角,如对 W_i 归一化且设偏置 b_i 为零( ‖W_i‖=1 , b_i=0 ),那么当 p_1=p_2 时,我们有 cos(θ_1)−cos(θ_2)=0 。从这里可以看到,如里一个输入的数据特征 x_i 属于 𝑦_𝑖 类,那么 θ_{y_i} 应该比其它所有类的角度都要小,也就是说在向量空间中 W_{y_i} 要更靠近 x_i 。 我们用的是Softmax Loss,对于输入 x_i ,So...
Deep Learning
2026-01-11
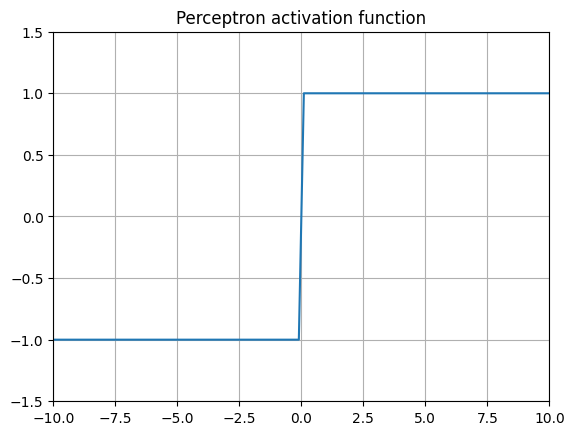
最近,似乎现在每个大型语言模型(LLM)和新闻中提到的复杂神经网络架构都使用略有不同的激活函数,而就在几年前,最常见的做法只是在神经网络的内部层中使用 ReLU。 曾经优秀的 ReLUs 怎么了,以及是什么促使最新的大型语言模型(LLMs)的创造者们开始使用不同的(更高级的)激活函数? Threshold activation (Perceptron) 1957 年,罗森布拉特建造了“感知机” 最古老的激活函数是基本感知器。它由芝加哥大学精神病学系的爱德华·麦克洛奇和沃尔特·皮茨构思,后来由弗兰克·罗森布拉特在 1957 年于康奈尔航空实验室为美国海军在硬件上更著名地实现了。该算法非常简单,其基本规则是:如果某个值超过某个阈值,则返回 1,否则返回 0。有些变体会返回 1 或1。 由于其二元...
Deep Learning
2026-01-11

引言与背景 随机逼近(Stochastic Approximation)是一类用于求解寻根或优化问题的随机迭代算法,其特点是不需要知道目标函数或其导数的表达式。 随机逼近的核心优势在于: 能够处理带有随机噪声的观测数据 不需要目标函数的解析表达式 可以在线学习,每获得一个新样本就更新估计值 均值估计问题 考虑一个随机变量 X ,其取值来自有限集合 [Math] 。我们的目标是估计 E[X] 。假设我们有一个独立同分布的样本序列 \{x_i\}_{i=1}^n ,那么 X 的期望值可以近似为: [公式] 非增量方法与增量方法 非增量方法:先收集所有样本,然后计算平均值。缺点是如果样本数量很大,可能需要等待很长时间。 增量方法:定义 [公式] 可以推导出递归公式: [公式] 这个算法可以增量式地...