Self-Supervised
2026-04-02
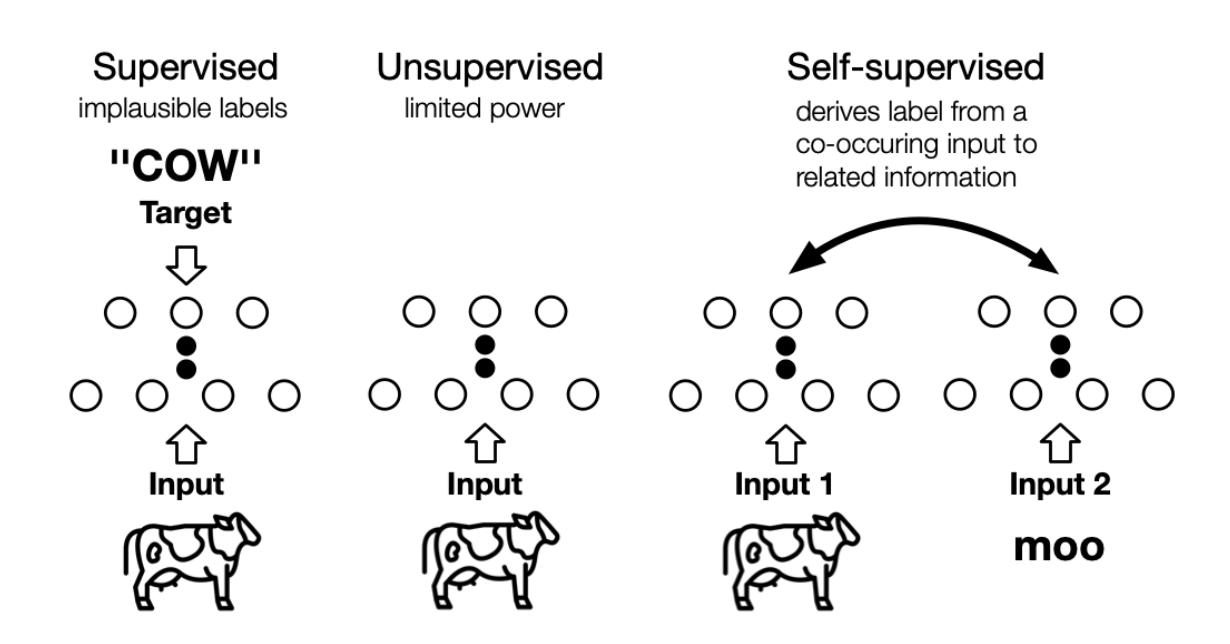
the machine predicts any parts of its input for any observed part 这是LeCun在AAAI 2020上对自监督学习的定义,再结合传统的自监督学习定义,可以总结如下两点特征: 通过“半自动”过程从数据本身获取“标签”; 从“其他部分”预测部分数据。 个人理解, 其实任意挖掘对象之间联系、探索不同对象共同本质的方法,都或多或少算是自监督学习的思想 。 自监督学习与无监督学习的区别主要在于,无监督学习专注于检测特定的数据模式,如聚类、社区发现或异常检测,而自监督学习的目标是恢复(recovering),仍处于监督学习的范式中。上图展示了三者之间的区别, 自监督中的“related information” 可以来自其他模态、输入的其他部分以及输入的不同形式。 Self-Supervised...