
11. 盛最多水的容器 题目 给定一个长度为 n 的整数数组 height 。有 n 条垂线,第 i 条线的两个端点是 (i, 0) 和 (i, height[i]) 。 找出其中的两条线,使得它们与 x 轴共同构成的容器可以容纳最多的水。 返回容器可以储存的最大水量。 说明: 你不能倾斜容器。 示例 1: 输入:[1,8,6,2,5,4,8,3,7]
输出:49
解释:图中垂直线代表输入数组 [1,8,6,2,5,4,8,3,7]。在此情况下,容器能够容纳水(表示为蓝色部分)的最大值为 49。 示例 2: 输入:height = [1,1]
输出:1 提示: n == height.length 2 <= n <= 10 5 0 <= height[i] <= 10 4 题解 在初始时,左右指针分别指向数组的左右两端,它们可以容纳的水量为 \(min(1,7)∗8=8\) 。 此时我们需要移动一个指针。移动哪一个呢?直觉告诉我们,应该移动对应数字较小的那个指针(即此时的左指针)。这是因为,由于容纳的水量是由 两个指针指向的数字中较小值∗指针之间的距离...
Large Model
2026-01-23
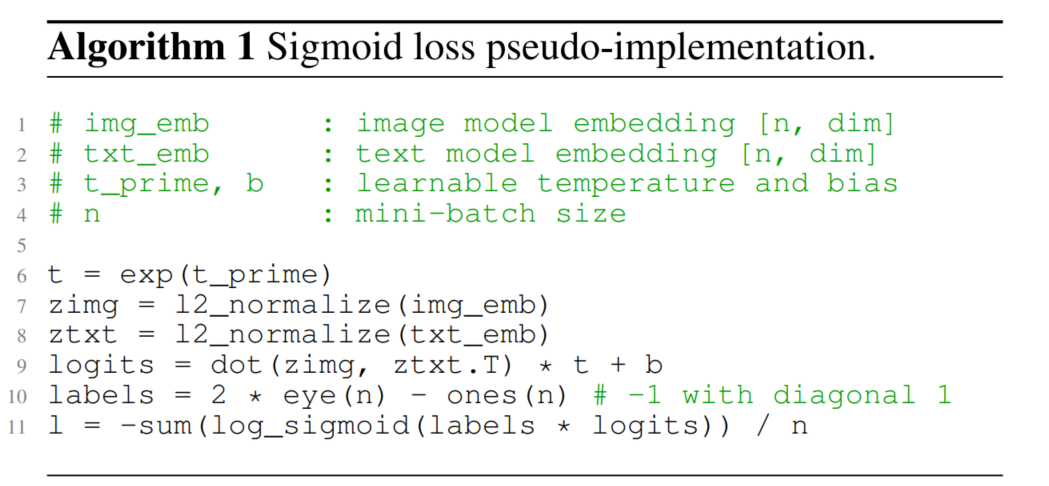
SigLIP 概述 CLIP自提出以来在zero-shot分类、跨模态搜索、多模态对齐等多个领域得到广泛应用。得益于其令人惊叹的能力,激起了研究者广泛的关注和优化。 目前对CLIP的优化主要可以分为两大类: 其一是如何降低CLIP的训练成本; 其二是如何提升CLIP的performance。 对于第一类优化任务的常见思路有3种。 优化训练架构,如 LiT 通过freezen image encoder,单独训练text encoder来进行text 和image的对齐来加速训练; 减少训练token,如 FLIP 通过引入视觉mask,通过只计算非mask区域的视觉表征来实现加速(MAE中的思路) 优化目标函数,如 CatLIP 将caption转为class label,用分类任务来代替对比学习任务来实现加速。 对于第二类提升CLIP的performance最常用和有效的手段就是数据治理,即构建高质量、大规模、高多样性的图文数据,典型的工作如:DFN。 SigLIP这篇paper 提出用sigmoid...
Large Model
2026-01-22
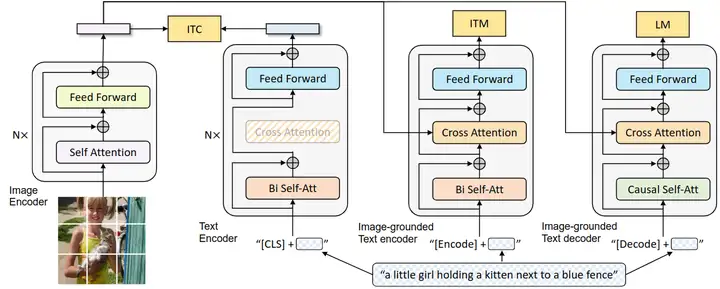
BLIP 论文名称 :BLIP: Bootstrapping Language-Image Pre-training for Unified Vision-Language Understanding and Generation (ICML 2022) 论文地址: https://arxiv.org/pdf/2201.12086.pdf 代码地址: https://github.com/salesforce/BLIP 官方解读博客: https://blog.salesforceairesearch.com/blip-bootstrapping-language-image-pretraining/ 背景和动机 视觉语言训练 (Vision-Language Pre-training, VLP) 最近在各种多模态下游任务上取得了巨大的成功。然而,现有方法有两个主要限制: 模型层面: 大多数现有的预训练模型仅在基于理解的任务或者基于生成的任务方面表现出色,很少有可以兼顾的模型。比如,基于编码器的模型,像 CLIP,ALBEF 不能直接转移到文本生成任务...
Large Model
2026-01-22

CLIP算法原理 CLIP 不预先定义图像和文本标签类别,直接利用从互联网爬取的 400 million 个image-text pair 进行图文匹配任务的训练,并将其成功迁移应用于30个现存的计算机视觉分类。简单的说,CLIP 无需利用 ImageNet 的数据和标签进行训练,就可以达到 ResNet50 在 ImageNet数据集上有监督训练的结果,所以叫做 Zero-shot。 CLIP(contrastive language-image pre-training)主要的贡献就是 利用无监督的文本信息,作为监督信号来学习视觉特征 。 CLIP 作者先是回顾了并总结了和上述相关的两条表征学习路线: 构建image和text的联系,比如利用已有的image-text pair数据集,从text中学习image的表征; 获取更多的数据(不要求高质量,也不要求full...
Deep Learning
2026-01-11
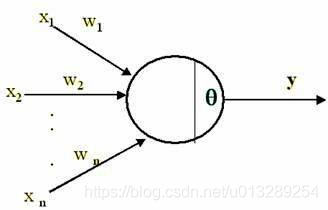
1.深度学习偏置的作用? 我们在学深度学习的时候,最早接触到的神经网络应该属于感知器(感知器本身就是一个很简单的神经网络,也许有人认为它不属于神经网络,当然认为它和神经网络长得像也行) 要想激活这个感知器,使得 y=1 ,就必须使 x_1w_1 + x_2w_2 +....+x_nw_n T ( T 为一个阈值),而 T 越大,想激活这个感知器的难度越大,人工选择一个阈值并不是一个好的方法,因为样本那么多,我不可能手动选择一个阈值,使得模型整体表现最佳,那么我们可以使得T变成可学习的,这样一来, T 会自动学习到一个数,使得模型的整体表现最佳。当把T移动到左边,它就成了偏置, x_1w_1 + x_2w_2 +....+x_nw_n T 0 xw +b 0 ,总之,偏置的大小控制着激活这个感...
Computer Vision
2026-01-11

在正式介绍之前,先简单回顾一下现有的两大类方法。第一大类,也是从非Deep时代,乃至CV初期就被就被广泛使用的方法叫做image pyramid。在image pyramid中,我们直接对图像进行不同尺度的缩放,然后将这些图像直接输入到detector中去进行检测。虽然这样的方法十分简单,但其效果仍然是最佳,也后续启发了SNIP这一系列的工作。单论性能而言,multiscale training/testing仍然是一个不可缺少的组件。然而其缺点也是很明显的,测试时间大幅度提高,对于实际使用并不友好。 另外一大类方法,也是Deep方法所独有的,也就是feature pyramid。最具代表性的工作便是经典的FPN了。这一类方法的思想是直接在feature层面上来近似image pyramid...
Computer Vision
2026-01-11
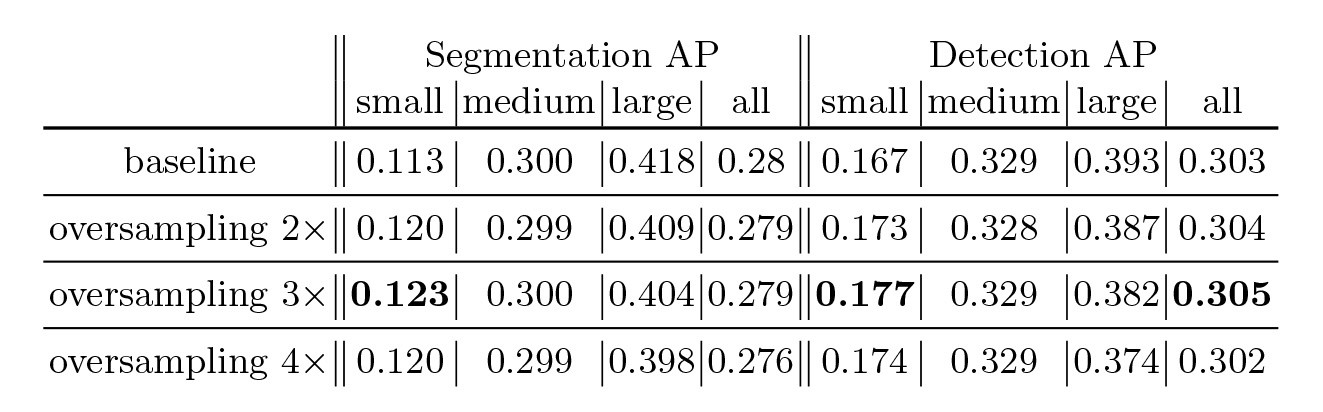
在深度学习目标检测中,特别是人脸检测中,由于分辨率低、图像模糊、信息少、噪声多,小目标和小人脸的检测一直是一个实用和常见的难点问题。然而,在过去几年的发展中,也出现了一些提高小目标检测性能的解决方案。本文将对这些方法进行分析、整理和总结。 图像金字塔和多尺度滑动窗口检测 一开始,在深学习方法成为流行之前,对于不同尺度的目标,通常是从原始图像开始,使用不同的分辨率构建图像金字塔,然后使用分类器对金字塔的每一层进行滑动窗口的目标检测。 在著名的人脸检测器MTCNN中,使用图像金字塔法检测不同分辨率的人脸目标。然而,这种方法通常是缓慢的,虽然构建图像金字塔可以使用卷积核分离加速或简单粗暴地缩放,但仍需要做多个特征提取,后来有人借其想法想出一个特征金字塔网络FPN,在不同层融合特征,只需要一次正向计...
Computer Vision
2026-01-11

简介 "Anchorfree"(无锚点)是一种目标检测方法,与传统的使用锚框(anchor boxes)的方法(例如Faster RCNN)不同。在传统方法中,锚框是预先定义的、具有不同尺寸和长宽比的矩形区域,用于捕捉不同尺寸和形状的目标。而在"anchorfree"方法中,不再使用锚框,而是直接预测目标的位置和形状,通常使用网络输出的热图和偏移信息。 以下是对"anchorfree"方法的一些关键理解点: 无需预定义锚框: 在传统目标检测方法中,需要事先定义和生成一组锚框,这可能需要大量的人工工作。而在"anchorfree"方法中,不再需要锚框,模型可以自动学习目标的位置和形状。 直接位置和形状回归: "anchorfree"方法通过输出的热图来表示目标的存在概率,并使用偏移信息来定位目...
Computer Vision
2026-01-11

YOLO的核心思想就是利用整张图作为网络的输入,直接在输出层回归bounding box的位置和bounding box所属的类别。 faster RCNN中也直接用整张图作为输入,但是fasterRCNN整体还是采用了RCNN那种 proposal+classifier的思想,只不过是将提取proposal的步骤放在CNN中实现了,而YOLO则采用直接回归的思路。 YOLO v1 将一幅图像分成SxS个网格(grid cell),如果某个object的中心 落在这个网格中,则这个网格就负责预测这个object。 每个网格要预测B个bounding box,每个bounding box除了要回归自身的位置之外,还要附带预测一个confidence值。 这个confidence代表了所预测的b...
Deep Learning
2026-01-11
如何计算RF 公式一:这个算法从top往下层层迭代直到追溯回input image,从而计算出RF。 [公式] 其中,RF是感受野。RF和RF有点像,N代表 neighbour,指的是第n层的 a feature在n1层的RF,记住N_RF只是一个中间变量,不要和RF混淆。 stride是步长,ksize是卷积核大小。
Computer Vision
2026-01-11

SPP (spatial pyramid pooling layer) SPP applies a slightly different strategy in detecting objects of different scales. It replaces the last pooling layer (after the last convolutional layer) with a spatial pyramid pooling layer. The feature maps are spatially divided into m×m bins with m, say, equals 1, 2, and 4 respectively. Then a maximum pool i...
Deep Learning
2026-01-11

通过卷积和池化等技术可以将图像进行降维,因此,一些研究人员也想办法恢复原分辨率大小的图像,特别是在语义分割领域应用很成熟。 1、Upsampling(上采样)[没有学习过程] 在FCN、Unet等网络结构中,涉及到了上采样。上采样概念:上采样指的是任何可以让图像变成更高分辨率的技术。最简单的方式是重采样和插值:将输入图片进行rescale到一个想要的尺寸,而且计算每个点的像素点,使用如双线性插值等插值方法对其余点进行插值来完成上采样过程。 在PyTorch中,上采样的层被封装在torch.nn中的Vision Layers里面,一共有4种: PixelShuffle Upsample UpsamplingNearest2d UpsamplingBilinear2d 0)PixelShuffl...