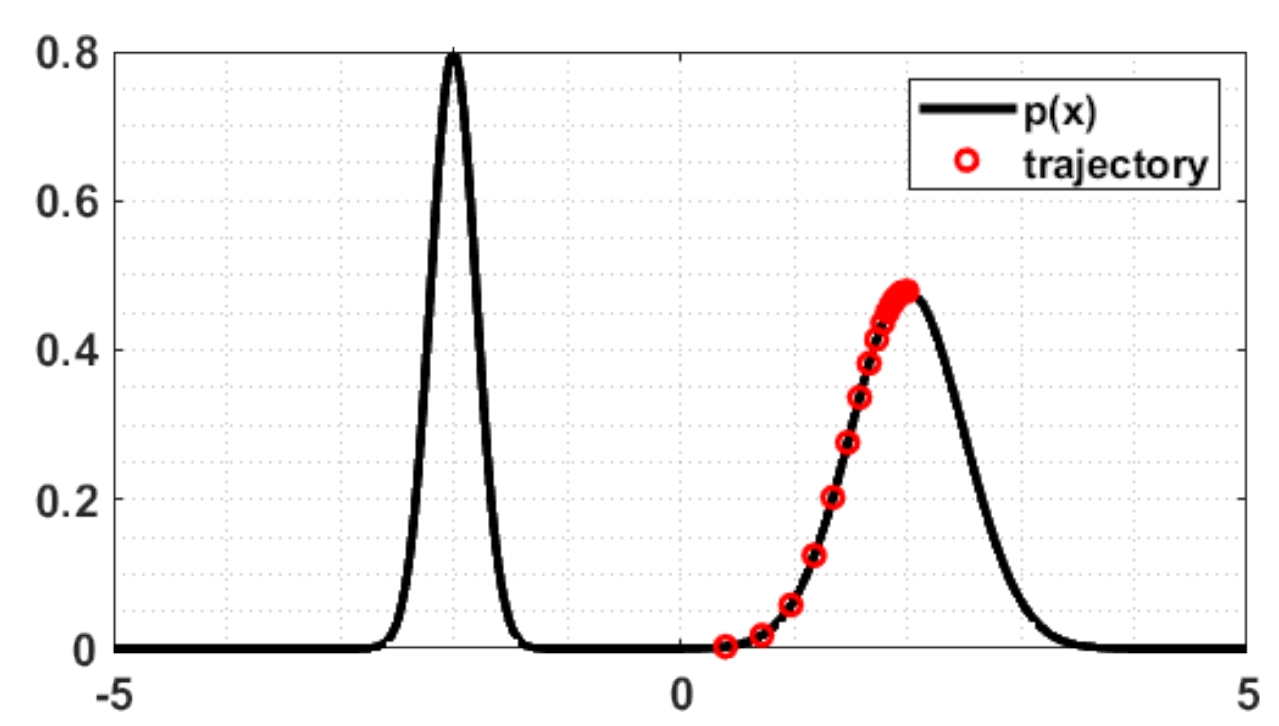
朗之万动力学(Langevin Dynamics)是扩散模型和score matching方法中的采样过程,是文本生成图像中的一个重要步骤。想要洞悉文生图的基本原理,朗之万动力学是绕不开的话题。 朗之万动力学原理简介 本文的主要内容是基于以下教程: Tutorial on Diffusion Models for Imaging and Vision 此教程写的非常好,非常推荐大家学习。教程的语言风格也很亲切,时不时地蹦出诸如“这是地球人能想出来的公式?”这样的话,为你枯燥的学习过程增添些许趣味。 朗之万动力学(Langevin Dynamics)是扩散模型和score matching方法中的采样过程,是文本生成图像中的一个重要步骤。想要洞悉文生图的基本原理,朗之万动力学是绕不开的话题。 给定一个已知的概率分布 \(p(x)\) ,我们的目标是采样出概率密度更大的那些样本。解决这个问题有多种方法,比如生成伪随机均匀分布,然后用概率分布变换的方法;或者用马尔可夫链蒙特卡洛方法(MCMC)。而朗之万动力学给出的方法是这样: 随机选取空间中一个点(这是很简单的,采用高斯生成与 \(x\)...
Deep Learning
2026-03-02

通过卷积和池化等技术可以将图像进行降维,因此,一些研究人员也想办法恢复原分辨率大小的图像,特别是在语义分割领域应用很成熟。 Upsampling(上采样)[没有学习过程] 在FCN、U-net等网络结构中,涉及到了上采样。上采样概念: 上采样指的是任何可以让图像变成更高分辨率的技术 。最简单的方式是 重采样和插值 :将输入图片进行rescale到一个想要的尺寸,而且计算每个点的像素点,使用如双线性插值等插值方法对其余点进行插值来完成上采样过程。 在PyTorch中,上采样的层被封装在 torch.nn 中的 Vision Layers 里面,一共有4种: PixelShuffle Upsample UpsamplingNearest2d UpsamplingBilinear2d PixelShuffle 当stride = (1/r) < 1时,可以让卷积后的feature map变大——即分辨率变大,这个新的操作叫做sub-pixel convolution,具体原理可以看 “PixelShuffle:Real-Time Single Image and Video...
Deep Learning
2026-02-28
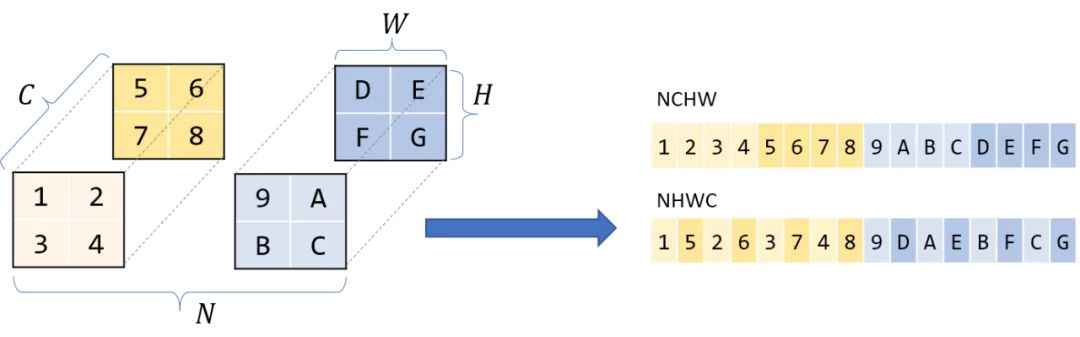
现代深度学习库对大多数操作都具有生产级的、高度优化的实现,这并不奇怪。但这些库究竟是什么魔法?他们如何能够将性能提高100倍?究竟怎样才能“优化”或加速神经网络的运行呢?在讨论高性能/高效DNNs时,我经常会问(也经常被问到)这些问题。 在这篇文章中,我将尝试带你了解在DNN库中卷积层是如何实现的。它不仅是在模型中最常见的和最重的操作,我还发现卷积高性能实现的技巧特别具有代表性——一点点算法的小聪明,非常多的仔细的调优和低层架构的开发。 我在这里介绍的很多内容都来自Goto等人的开创性论文:Anatomy of a high-performance matrix multiplication,该论文为OpenBLAS等线性代数库中使用的算法奠定了基础。 最原始的卷积实现 “过早的优化是万恶之源”——Donald Knuth 在进行优化之前,我们先了解一下基线和瓶颈。这是一个朴素的numpy/for循环卷积: '''
Convolve `input` with `kernel` to generate `output`
input.shape =...

Hough Voting 本文的标题是Deep Hough Voting,先来说一下Hough Voting。 用Hough变换检测直线大家想必都听过:对于一条直线,可以使用 \((r,θ)\) 两个参数进行描述,那么对于图像中的一点,过这个点的直线有很多条,可以生成一系列的 \((r,θ)\) ,在参数平面内就是一条曲线,也就是说,一个点对应着参数平面内的一个曲线。那如果有很多个点,则会在参数平面内生成很多曲线。那么,如果这些点是能构成一条直线的,那么这条直线的参数 \((r,θ)\) 就在每条曲线中都存在,所以看起来就像是多条曲线相交在 \((r,θ)\) 。可以用多条曲线投票的方式来看,其他点都是很少的票数,而 \((r,θ)\) 则票数很多,所以直线的参数就是 \((r,θ)\) 。 所以Hough变换的思想就是在于,在参数空间内进行投票,投票得数高的就是要得到的值。 文中提到的Hough Voting如下: A traditional Hough voting 2D detector comprises an offline and an online step....
3D Model
2026-02-12

三维深度学习简介 多视角(multi-view):通过多视角二维图片组合为三维物体,此方法将传统CNN应用于多张二维视角的图片,特征被view pooling procedure聚合起来形成三维物体; 体素(volumetric):通过将物体表现为空间中的体素进行类似于二维的三维卷积(例如,卷积核大小为5x5x5),是规律化的并且易于类比二维的,但同时因为多了一个维度出来,时间和空间复杂度都非常高,目前已经不是主流的方法了; 点云(point clouds):直接将三维点云抛入网络进行训练,数据量小。主要任务有分类、分割以及大场景下语义分割; 非欧式(manifold,graph):在流形或图的结构上进行卷积,三维点云可以表现为mesh结构,可以通过点对之间临接关系表现为图的结构。 点云的特性 无序性...

概括 这篇文章将卷积比较自然地拓展到点云的情形,思路很赞! 文章的主要创新点:“weight function”和“density function”,并能实现translation-invariance和permutation-invariance,可以实现层级化特征提取,而且能自然推广到其deconvolution的情形实现分割,在二维CIFAR-10图像分类任务中精度堪比CNN(表明能够充分近似卷积网络),达到了SOTA的性能。 缺点:每个kernel都需要由“kernel function”生成,而“kernel function”实质上是一个CNN网络,计算量比较大。 思想 察觉到:二维卷积中pixel的相对centroid位置与kernel vector的生成方式有关。 以二维卷积为例说明一下如何将卷积拓展到点云。这里只考虑使用一个kernel在一个location的一次卷积操作。 对于二维图像,我们可以将图像的pixels看作是一个点,那么图像就是整齐排列的点阵。每个point都有维度为 \(C_{in}\)...
杂七杂八
2026-01-11
大数据本身是个很宽泛的概念,Hadoop生态圈(或者泛生态圈)基本上都是为了处理超过单机尺度的数据处理而诞生的。你可以把它比作一个厨房所以需要的各种工具。锅碗瓢盆,各有各的用处,互相之间又有重合。你可以用汤锅直接当碗吃饭喝汤,你可以用小刀或者刨子去皮。但是每个工具有自己的特性,虽然奇怪的组合也能工作,但是未必是最佳选择。 大数据,首先你要能存的下大数据 传统的文件系统是单机的,不能横跨不同的机器。HDFS(Hadoop Distributed FileSystem)的设计本质上是为了大量的数据能横跨成百上千台机器,但是你看到的是一个文件系统而不是很多文件系统。比如你说我要获取/hdfs/tmp/file1的数据,你引用的是一个文件路径,但是实际的数据存放在很多不同的机器上。你作为用户,不需要...
杂七杂八
2026-01-11
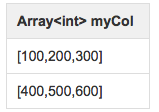
1. explode hive wiki对于expolde的解释如下: explode() takes in an array (or a map) as an input and outputs the elements of the array (map) as separate rows. UDTFs can be used in the SELECT expression list and as a part of LATERAL VIEW. As an example of using explode() in the SELECT expression list, consider a table named myTable that has a single column (m...
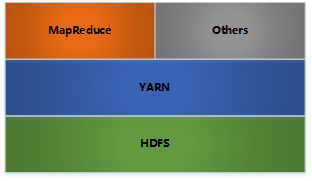
Apache Hadoop 是一款支持数据密集型分布式应用程序并以Apache 2.0许可协议发布的开源软件框架。它支持在商用硬件构建的大型集群上运行的应用程序。Hadoop是根据谷歌公司发表的MapReduce 和Google文件系统的论文自行实现而成。所有的Hadoop模块都有一个基本假设,即硬件故障是常见情况,应该由框架自动处理。具体参考官方教程。 Hadoop架构 HDFS: 分布式文件存储 YARN: 分布式资源管理 MapReduce: 分布式计算 Others: 利用YARN的资源管理功能实现其他的数据处理方式 内部各个节点基本都是采用MasterWoker架构 Hadoop HDFS 架构 Block数据块; NameNode Secondary NameNode DataN...