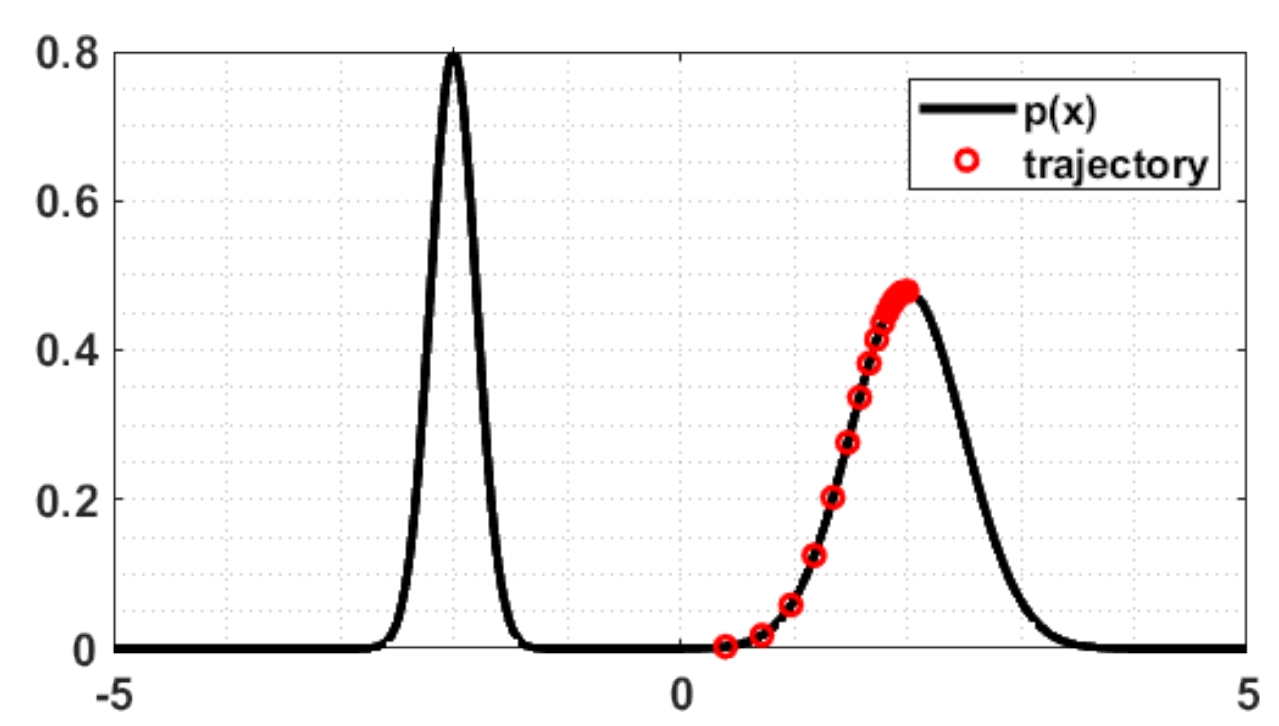
朗之万动力学(Langevin Dynamics)是扩散模型和score matching方法中的采样过程,是文本生成图像中的一个重要步骤。想要洞悉文生图的基本原理,朗之万动力学是绕不开的话题。 朗之万动力学原理简介 本文的主要内容是基于以下教程: Tutorial on Diffusion Models for Imaging and Vision 此教程写的非常好,非常推荐大家学习。教程的语言风格也很亲切,时不时地蹦出诸如“这是地球人能想出来的公式?”这样的话,为你枯燥的学习过程增添些许趣味。 朗之万动力学(Langevin Dynamics)是扩散模型和score matching方法中的采样过程,是文本生成图像中的一个重要步骤。想要洞悉文生图的基本原理,朗之万动力学是绕不开的话题。 给定一个已知的概率分布 \(p(x)\) ,我们的目标是采样出概率密度更大的那些样本。解决这个问题有多种方法,比如生成伪随机均匀分布,然后用概率分布变换的方法;或者用马尔可夫链蒙特卡洛方法(MCMC)。而朗之万动力学给出的方法是这样: 随机选取空间中一个点(这是很简单的,采用高斯生成与 \(x\)...
Machine Learning
2026-03-18

集成学习主要分为以下几类:Bagging,Boosting以及Stacking。 传统机器学习算法 (例如:决策树,人工神经网络,支持向量机,朴素贝叶斯等) 的目标都是寻找一个最优分类器尽可能的将训练数据分开。集成学习 (Ensemble Learning) 算法的基本思想就是将多个分类器组合,从而实现一个预测效果更好的集成分类器。集成算法可以说从一方面验证了中国的一句老话:三个臭皮匠,赛过诸葛亮。 Thomas G. Dietterich 指出了集成算法在统计,计算和表示上的有效原因: 统计上的原因 一个学习算法可以理解为在一个假设空间 H 中选找到一个最好的假设。但是,当训练样本的数据量小到不够用来精确的学习到目标假设时,学习算法可以找到很多满足训练样本的分类器。所以,学习算法选择任何一个分类器都会面临一定错误分类的风险,因此将多个假设集成起来可以降低选择错误分类器的风险。 计算上的原因 很多学习算法在进行最优化搜索时很有可能陷入局部最优的错误中,因此对于学习算法而言很难得到一个全局最优的假设。事实上人工神经网络和决策树已经被证实为是一 个NP...
Machine Learning
2026-03-18

从GBDT到XGBoost 作为GBDT的高效实现,XGBoost是一个上限特别高的算法,因此在算法竞赛中比较受欢迎。简单来说,对比原算法GBDT,XGBoost主要从下面三个方面做了优化: 一是算法本身的优化:在算法的弱学习器模型选择上,对比GBDT只支持决策树,还可以选择很多其他的弱学习器。在算法的损失函数上,除了本身的损失,还加上了正则化部分。在算法的优化方式上,GBDT的损失函数只对误差部分做负梯度(一阶泰勒)展开,而XGBoost损失函数对误差部分做二阶泰勒展开,更加准确。算法本身的优化是我们后面讨论的重点。 二是算法运行效率的优化:对每个弱学习器,比如决策树建立的过程做并行选择,找到合适的子树分裂特征和特征值。在并行选择之前,先对所有的特征的值进行排序分组,方便前面说的并行选择。对分组的特征,选择合适的分组大小,使用CPU缓存进行读取加速。将各个分组保存到多个硬盘以提高IO速度。 三是算法健壮性的优化:对于缺失值的特征,通过枚举所有缺失值在当前节点是进入左子树还是右子树来决定缺失值的处理方式。算法本身加入了L1和L2正则化项,可以防止过拟合,泛化能力更强。...
Machine Learning
2026-03-18
GBDT (Gradient Boosting Decision Tree) 是另一种基于 Boosting 思想的集成算法,除此之外 GBDT 还有很多其他的叫法,例如:GBM (Gradient Boosting Machine),GBRT (Gradient Boosting Regression Tree),MART (Multiple Additive Regression Tree) 等等。GBDT 算法由 3 个主要概念构成:Gradient Boosting (GB),Regression Decision Tree (DT 或 RT) 和 Shrinkage。 Decision Tree:CART回归树 首先,GBDT使用的决策树是CART回归树,无论是处理回归问题还是二分类以及多分类,GBDT使用的决策树通通都是都是CART回归树。为什么不用CART分类树呢?因为GBDT每次迭代要拟合的是 梯度值...
Machine Learning
2026-03-18
分类问题 Adaboost 是 Boosting 算法中有代表性的一个。原始的 Adaboost 算法用于解决二分类问题,因此对于一个训练集 \[T = \{\left(x_1, y_1\right), \left(x_2, y_2\right), ..., \left(x_n, y_n\right)\}\] 其中 \(x_i \in \mathcal{X} \subseteq \mathbb{R}^n, y_i \in \mathcal{Y} = \{-1, +1\}\) ,,首先初始化训练集的权重 \[\begin{aligned}
D_1 =& \left(w_{11}, w_{12}, ..., w_{1n}\right) \\
w_{1i} =& \dfrac{1}{n}, i = 1, 2, ..., n
\end{aligned}\] 根据每一轮训练集的权重 \(D_m\) ,对训练集数据进行抽样得到 \(T_m\) ,再根据 \(T_m\) 训练得到每一轮的基学习器 \(h_m\) 。通过计算可以得出基学习器 \(h_m\) 的误差为 \(e_m\) \[e_m =...
Computer Vision
2026-02-26

上图是Yolo v4中,对各种detector部件的总结:包含Input、backbone、neck、head、... Backbone 轻量级网络系列 Neck 例如:SPP 、 ASPP 、 RFB、 SAM 用来增加感受野 特征融合,主要是指不同输出层直接的特征融合,主要包括FPN、PAN、SFAM、ASFF和BiFPN。 结构 Path Aggregation Blcok Deformable Convolution系列 One stage Yolo系列 Focal Loss & RetinaNet Two-Stage Faster R-CNN R-FCN Anchor Free Anchor-Free Transformer DETR Problems 目标检测中的多尺度问题 NMS及其改进 IoU loss系列 目标检测中mAP计算
Computer Vision
2026-02-26
mAP定义及相关概念 mAP: mean Average Precision, 即各类别AP的平均值 AP: PR曲线下面积,后文会详细讲解 PR曲线: Precision-Recall曲线 Precision: TP / (TP + FP) Recall: TP / (TP + FN) TP: IoU>0.5的检测框数量(同一Ground Truth只计算一次) FP: IoU<=0.5的检测框,或者是检测到同一个GT的多余检测框的数量 FN: 没有检测到的GT的数量 mAP的具体计算 由前面定义,我们可以知道,要计算mAP必须先绘出各类别PR曲线,计算出AP。而如何采样PR曲线,VOC采用过两种不同方法。 在VOC2010以前,只需要选取当Recall >= 0, 0.1, 0.2, ..., 1共11个点时的Precision最大值,然后AP就是这11个Precision的平均值。 在VOC2010及以后,需要针对每一个不同的Recall值(包括0和1),选取其大于等于这些Recall值时的Precision最大值,然后计算PR曲线下面积作为AP值。 mAP计算示例 假设,对于...
Computer Vision
2026-02-26

简介 "Anchor-free"(无锚点)是一种目标检测方法,与传统的使用锚框(anchor boxes)的方法(例如Faster R-CNN)不同。在传统方法中,锚框是预先定义的、具有不同尺寸和长宽比的矩形区域,用于捕捉不同尺寸和形状的目标。而在"anchor-free"方法中,不再使用锚框,而是直接预测目标的位置和形状,通常使用网络输出的热图和偏移信息。 以下是对"anchor-free"方法的一些关键理解点: 无需预定义锚框: 在传统目标检测方法中,需要事先定义和生成一组锚框,这可能需要大量的人工工作。而在"anchor-free"方法中,不再需要锚框,模型可以自动学习目标的位置和形状。 直接位置和形状回归: "anchor-free"方法通过输出的热图来表示目标的存在概率,并使用偏移信息来定位目标的中心和形状。这些热图和偏移信息通常通过卷积神经网络预测。 适用于不规则目标: 传统的锚框在捕捉不规则形状的目标时可能会有困难,而"anchor-free"方法可以更好地适应不规则目标的检测。 减少计算复杂性:...
Computer Vision
2026-02-26
IOU(Intersection over Union) 特性(优点) IoU就是我们所说的 交并比 ,是目标检测中最常用的指标,在anchor-based的方法中,他的作用不仅用来确定正样本和负样本,还可以用来评价输出框(predict box)和ground-truth的距离。 \[IoU = \frac{|A \cap B|}{|A \cup B|}
\] 可以说 它可以反映预测检测框与真实检测框的检测效果。 还有一个很好的特性就是 尺度不变性 ,也就是对尺度不敏感(scale invariant), 在regression任务中,判断predict box和gt的距离最直接的指标就是IoU。 (满足非负性;同一性;对称性;三角不等性) import numpy as np
def Iou(box1, box2, wh=False):
if wh == False:
xmin1, ymin1, xmax1, ymax1 = box1
xmin2, ymin2, xmax2, ymax2 = box2
else:
xmin1, ymin1 =...
Computer Vision
2026-02-26
过程: 根据分类概率从小到大排序ABCDEF 从最大概率F开始,F与A~E的IOU是否大于阈值 大于的扔掉,从剩下的当中继续重复2~3 import numpy as np
def nms(bbox, scores, Nt):
if len(bbox) == 0:
return []
bboxes = np.array(bbox)
x1 = bboxes[:, 0]
y1 = bboxes[:, 1]
x2 = bboxes[:, 2]
y2 = bboxes[:, 3]
area = (x2 - x1 + 1) * (y2 - y1 + 1)
order = np.argsort(scores)
res = []
while order.size > 0:
index = order[-1]
res.append(bboxes[index])
x11 = np.maximum(x1[index], x1[order[:-1]])
...
Computer Vision
2026-02-26
传统的图像金字塔 最开始在深度学习方法流行之前,对于不同尺度的目标,大家普遍使用将原图构建出不同分辨率的图像金字塔,再对每层金字塔用固定输入分辨率的分类器在该层滑动来检测目标,以求在金字塔底部检测出小目标;或者只用一个原图,在原图上, 用不同分辨率的分类器来检测目标,以求在比较小的窗口分类器中检测到小目标。 经典的 基于简单矩形特征(Haar)+级联Adaboost与Hog特征+SVM的DPM目标识别框架,均使用图像金字塔的方式处理多尺度目标 ,早期的CNN目标识别框架同样采用该方式,但对图像金字塔中的每一层分别进行CNN提取特征,耗时与内存消耗均无法满足需求。但 该方式毫无疑问仍然是最优的。 值得一提的是,其实目前大多数深度学习算法提交结果进行排名的时候,大多使用 多尺度测试 。同时类似于SNIP使用多尺度训练,均是图像金字塔的多尺度处理。 SNIP 图像分类算法,比如ResNeXt-101 32 × 48d网络结构,在Imagenet数据集上的Top5准确率已经98%左右,Top1为85%。对于图像检测算法,最好的模型在coco数据集上的效果 \(AP_{50}\)...
Computer Vision
2026-02-26

原理分析 网络架构: 本文的任务是Object detection,用到的工具是Transformers,特点是End-to-end。 目标检测的任务是要去预测一系列的Bounding Box的坐标以及Label, 现代大多数检测器通过定义一些proposal,anchor或者windows,把问题构建成为一个分类和回归问题来间接地完成这个任务。 文章所做的工作,就是将transformers运用到了object detection领域,取代了现在的模型需要手工设计的工作,并且取得了不错的结果。 在object detection上DETR准确率和运行时间上和Faster RCNN相当;将模型 generalize 到 panoptic segmentation 任务上,DETR表现甚至还超过了其他的baseline。DETR第一个使用End to End的方式解决检测问题,解决的方法是把检测问题视作是一个set prediction problem,如下图所示。...