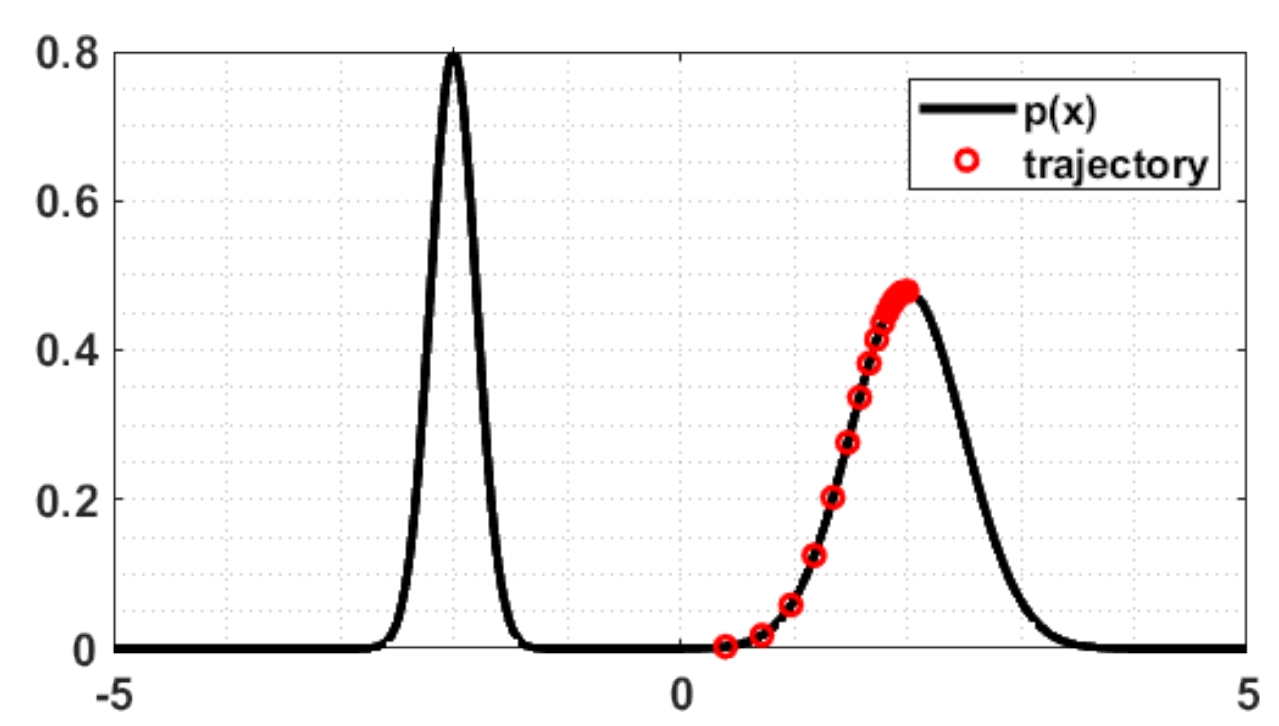
朗之万动力学(Langevin Dynamics)是扩散模型和score matching方法中的采样过程,是文本生成图像中的一个重要步骤。想要洞悉文生图的基本原理,朗之万动力学是绕不开的话题。 朗之万动力学原理简介 本文的主要内容是基于以下教程: Tutorial on Diffusion Models for Imaging and Vision 此教程写的非常好,非常推荐大家学习。教程的语言风格也很亲切,时不时地蹦出诸如“这是地球人能想出来的公式?”这样的话,为你枯燥的学习过程增添些许趣味。 朗之万动力学(Langevin Dynamics)是扩散模型和score matching方法中的采样过程,是文本生成图像中的一个重要步骤。想要洞悉文生图的基本原理,朗之万动力学是绕不开的话题。 给定一个已知的概率分布 \(p(x)\) ,我们的目标是采样出概率密度更大的那些样本。解决这个问题有多种方法,比如生成伪随机均匀分布,然后用概率分布变换的方法;或者用马尔可夫链蒙特卡洛方法(MCMC)。而朗之万动力学给出的方法是这样: 随机选取空间中一个点(这是很简单的,采用高斯生成与 \(x\)...
Large Model
2026-03-09
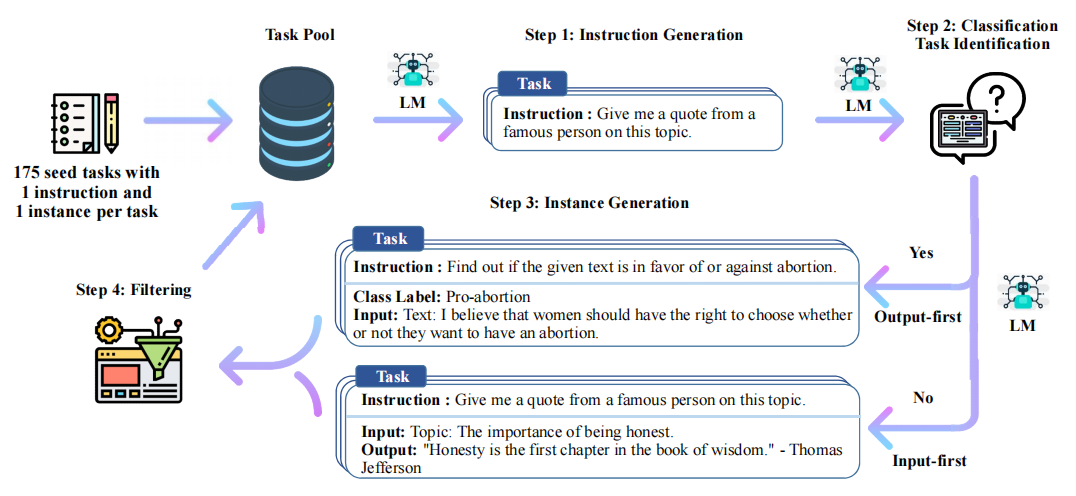
Stanford Alpaca 结合英文语料通过Self Instruct方式微调LLaMA 7B Stanford Alpaca简介 2023年3月中旬,斯坦福的Rohan Taori等人发布Alpaca(中文名:羊驼):号称只花100美元,人人都可微调Meta家70亿参数的LLaMA大模型(即LLaMA 7B), 具体做法是通过52k指令数据,然后在8个80GB A100上训练3个小时,使得Alpaca版的LLaMA 7B在单纯对话上的性能比肩GPT-3.5(text-davinci-003) ,这便是指令调优LLaMA的意义所在 论文《Alpaca: A Strong Open-Source Instruction-Following Model》 GitHub地址: https://github.com/tatsu-lab/stanford_alpaca 数据地址 (即斯坦福团队微调LLaMA 7B所用的52K英文指令数据): raw.githubusercontent.com/tatsu-lab/stanford_alpaca/main/alpaca_data.json...
Large Model
2026-03-06
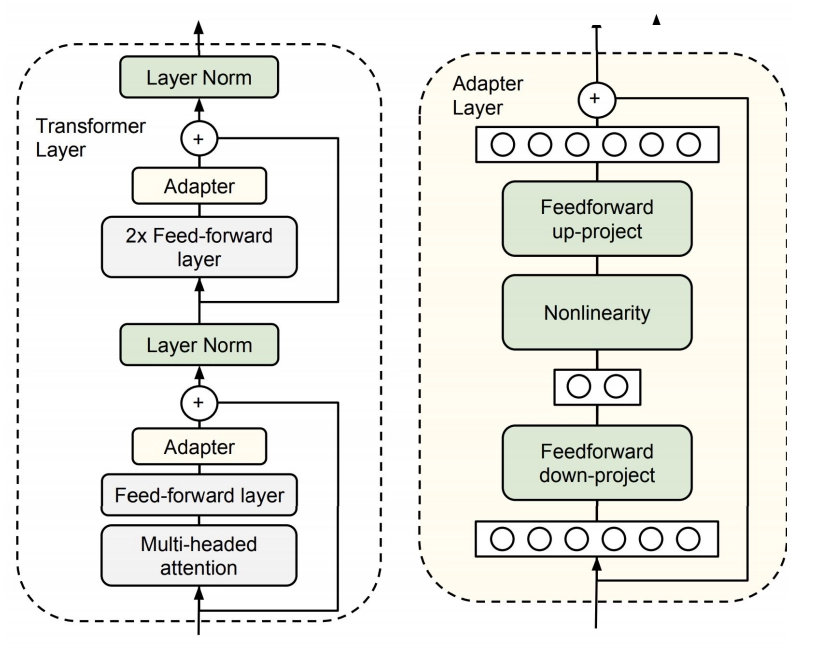
Adapter tuning Adapter Tuning试图在Transformer Layer的Self-Attetion+FFN之后插入一个先降维再升维的MLP(以及一层残差和LayerNormalization)来学习模型微调的知识。 在预训练模型每一层(或某些层)中添加Adapter模块(如上图左侧结构所示),微调时冻结预训练模型主体,由Adapter模块学习特定下游任务的知识。每个Adapter模块由两个前馈子层组成,第一个前馈子层将Transformer块的输出作为输入,将原始输入维度 \(d\) 投影到 \(m\) ,通过控制 \(m\) 的大小来限制Adapter模块的参数量,通常情况下 \(m\ll d\) 。在输出阶段,通过第二个前馈子层还原输入维度,将 \(m\) 重新投影到 \(d\)...
Computer Vision
2026-02-26
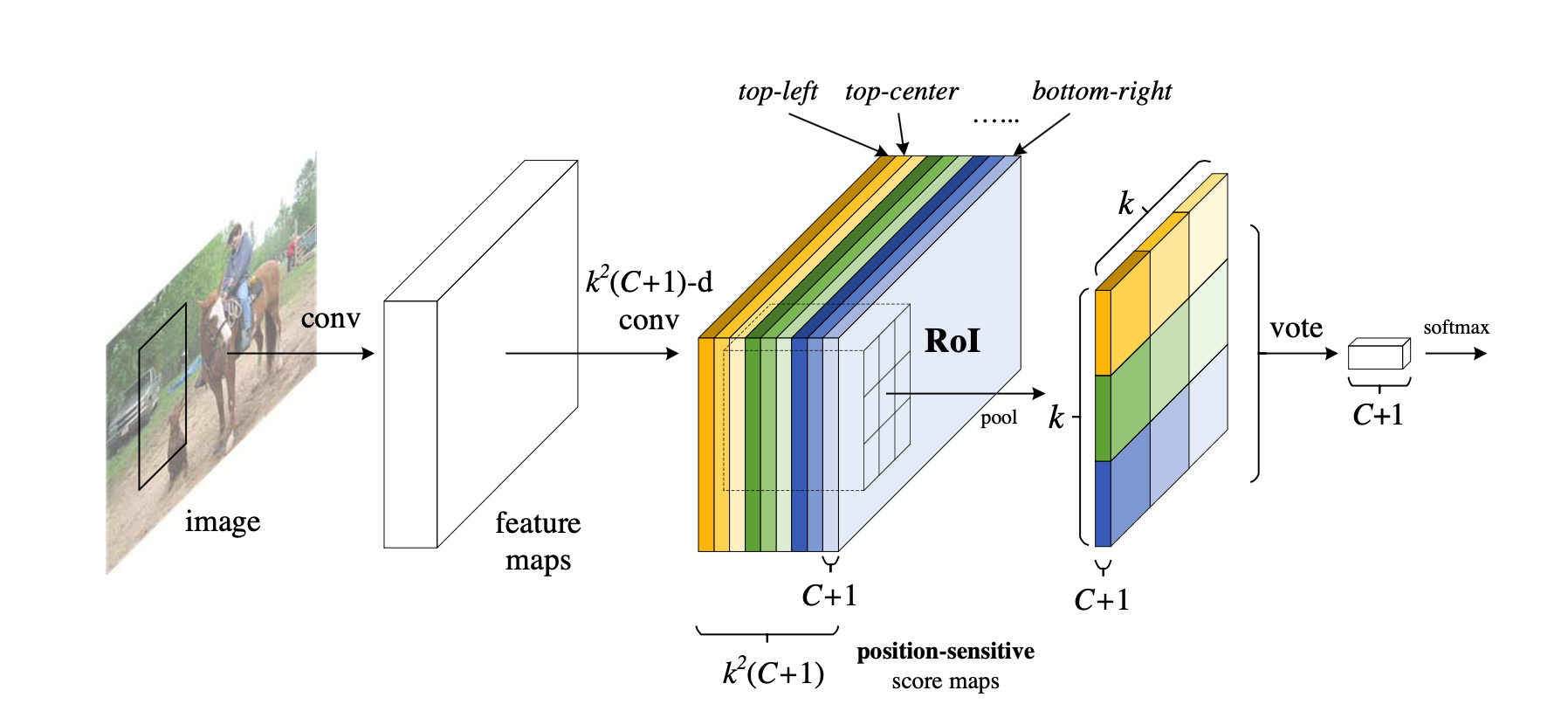
动机 Faster R-CNN是首个利用CNN来完成proposals的预测的,之后的很多目标检测网络都是借助了Faster R-CNN的思想。而Faster R-CNN系列的网络都可以分成2个部分: Fully Convolutional subnetwork before RoI Layer RoI-wise subnetwork 第1部分就是直接用普通分类网络的卷积层,用其来提取共享特征,然后一个RoI Pooling Layer在第1部分的最后一张特征图上进行提取针对各个RoIs的特征向量(或者说是特征图,维度变换一下即可),然后将所有RoIs的特征向量都交由第2部分来处理(分类和回归),而第二部分一般都是一些全连接层,在最后有2个并行的loss函数:softmax和smoothL1,分别用来对每一个RoI进行分类和回归,这样就可以得到每个RoI的真实类别和较为精确的坐标和长宽了。...
Computer Vision
2026-02-26

Deformable Conv v1 这篇文章其实比较老了,是 2017 年 5 月出的 Motivation Task 上的难点 视觉任务中一个难点就是如何 model 物体的几何变换,比如由于物体大小,pose, viewpoint 引起的。一般有两类做法: 在数据集上做文章,让 training dataset 就包含所有可能的集合变换。通过 affine transformation 去做 augmentation 另一种就是设计 transformation-invariant (对那些几何变换不变)的 feature 和算法。比如 SIFT 和 sliding window 的方式。 文章说上述两种方式有问题,几何变换我们是事先知道的,这种不能 generalize 到其它场景和任务中。以及 hand-crafted 的设计适应不了负责场景。 CNN 的缺陷 对于geometric transformation 的问题,目前的 CNN 主要是通过 data augmentation 和一些手工设计,比如 max-pooling 解决的(max-pooling...

Hough Voting 本文的标题是Deep Hough Voting,先来说一下Hough Voting。 用Hough变换检测直线大家想必都听过:对于一条直线,可以使用 \((r,θ)\) 两个参数进行描述,那么对于图像中的一点,过这个点的直线有很多条,可以生成一系列的 \((r,θ)\) ,在参数平面内就是一条曲线,也就是说,一个点对应着参数平面内的一个曲线。那如果有很多个点,则会在参数平面内生成很多曲线。那么,如果这些点是能构成一条直线的,那么这条直线的参数 \((r,θ)\) 就在每条曲线中都存在,所以看起来就像是多条曲线相交在 \((r,θ)\) 。可以用多条曲线投票的方式来看,其他点都是很少的票数,而 \((r,θ)\) 则票数很多,所以直线的参数就是 \((r,θ)\) 。 所以Hough变换的思想就是在于,在参数空间内进行投票,投票得数高的就是要得到的值。 文中提到的Hough Voting如下: A traditional Hough voting 2D detector comprises an offline and an online step....
3D Model
2026-02-12

三维深度学习简介 多视角(multi-view):通过多视角二维图片组合为三维物体,此方法将传统CNN应用于多张二维视角的图片,特征被view pooling procedure聚合起来形成三维物体; 体素(volumetric):通过将物体表现为空间中的体素进行类似于二维的三维卷积(例如,卷积核大小为5x5x5),是规律化的并且易于类比二维的,但同时因为多了一个维度出来,时间和空间复杂度都非常高,目前已经不是主流的方法了; 点云(point clouds):直接将三维点云抛入网络进行训练,数据量小。主要任务有分类、分割以及大场景下语义分割; 非欧式(manifold,graph):在流形或图的结构上进行卷积,三维点云可以表现为mesh结构,可以通过点对之间临接关系表现为图的结构。 点云的特性 无序性...

概括 这篇文章将卷积比较自然地拓展到点云的情形,思路很赞! 文章的主要创新点:“weight function”和“density function”,并能实现translation-invariance和permutation-invariance,可以实现层级化特征提取,而且能自然推广到其deconvolution的情形实现分割,在二维CIFAR-10图像分类任务中精度堪比CNN(表明能够充分近似卷积网络),达到了SOTA的性能。 缺点:每个kernel都需要由“kernel function”生成,而“kernel function”实质上是一个CNN网络,计算量比较大。 思想 察觉到:二维卷积中pixel的相对centroid位置与kernel vector的生成方式有关。 以二维卷积为例说明一下如何将卷积拓展到点云。这里只考虑使用一个kernel在一个location的一次卷积操作。 对于二维图像,我们可以将图像的pixels看作是一个点,那么图像就是整齐排列的点阵。每个point都有维度为 \(C_{in}\)...
Self-Supervised
2026-01-23

如果把 近几年对比学习在视觉领域有代表性的工作做一下总结,那么对比学习的发展历程大概可以分为四个阶段: 百花齐放 这个阶段代表性工作有InstDisc(instance discrimination,)、CPC、CMC等。在这个阶段中,方法、模型、目标函数、代理任务都还没有统一,所以说是一个百花齐放的时代 CV双雄 代表作有MoCo v1、SimCLR v1、MoCo v2、SimCLR v2;CPC、CMC的延伸工作、SwAV等。这个阶段发展非常迅速,有的工作间隔甚至不到一个月,ImageNet上的成绩基本上每个月都在被刷新。 不用负样本 BYOL及其改进工作、SimSiam(CNN在对比学习中的总结性工作) transformer MoCo v3、DINO。这个阶段,无论是对比学习还是最新的掩码学习,都是用Vision Transformer做的。 第一阶段:百花齐放(2018-2019Mid) InstDisc(instance discrimination) 这篇文章提出了个体判别任务(代理任务)以及 memory bank ,非常经典,后人给它的方法起名为InstDisc。...
Self-Supervised
2026-01-23
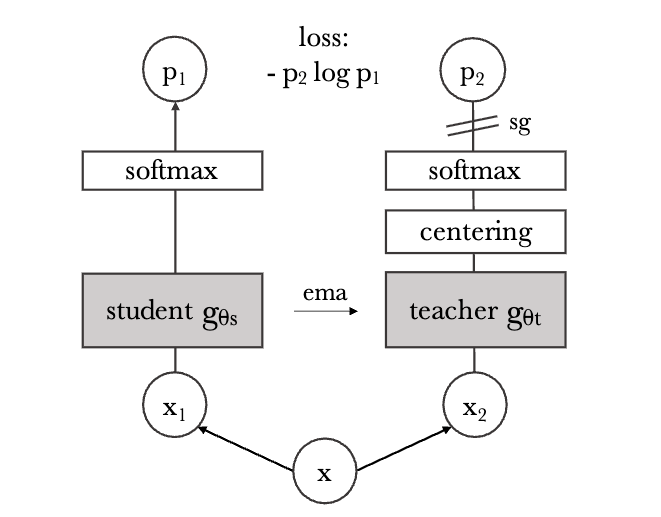
DINO Emerging Properties in Self-Supervised Vision Transformers 论文地址: arxiv.org/pdf/2104.14294 DINO摇摆到了动量式更新,果然【加动量】还是比【只用梯度停止】香。DINO的名字来自于Self- di stillation with no labels中的蒸馏和No标签。 DINO的训练步骤 其实以前的对比学习方案也可以理解为知识蒸馏,DINO里更具体得描述了知识蒸馏的含义。 下图展示了一个样本通过数据增强得到一对views \((x_1,x_2)\) 。注意DINO后面还会使用更复杂的裁剪和对比方案,但这里简单起见先不考虑那些。模型将输入图像的两种不同的随机变换 \(x_1\) 和 \(x_2\) 分别传递给学生和教师网络。 这两个网络具有相同的架构,但参数不同 。教师网络的输出以batch内计算的平均值,进行中心化(减去均值)。每个网络输出一个 \(K\)...
Self-Supervised
2026-01-23
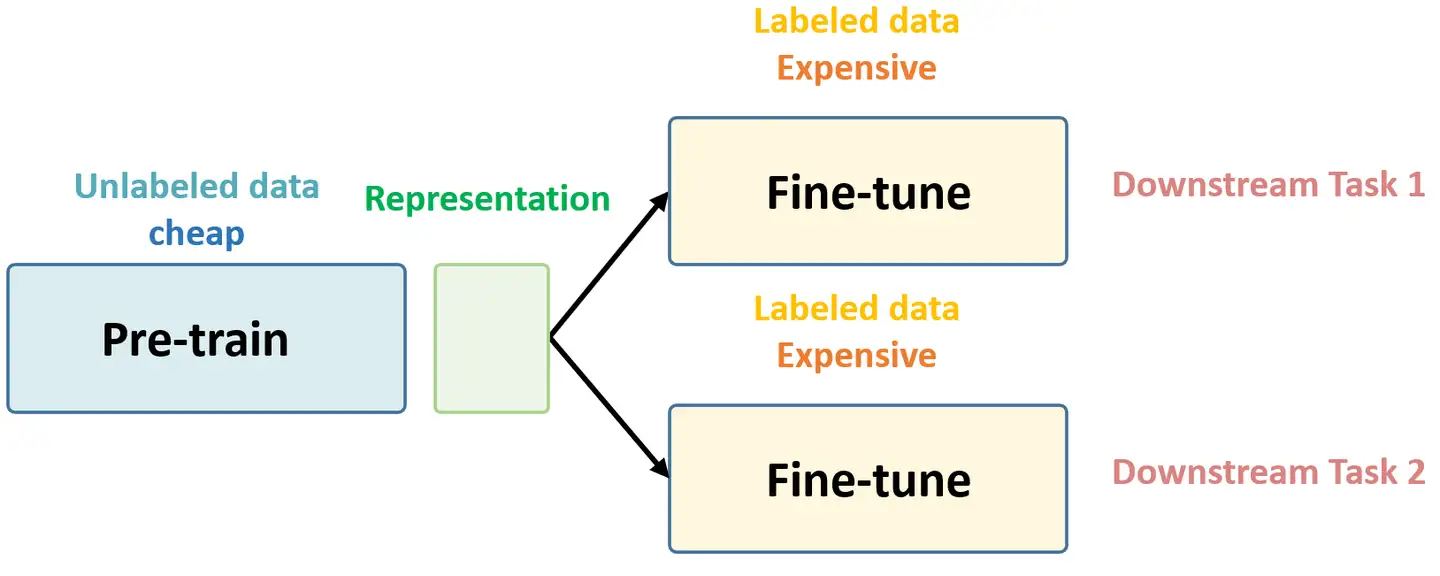
Self-Supervised Learning ,又称为自监督学习,我们知道一般机器学习分为有监督学习,无监督学习和强化学习。 而 Self-Supervised Learning 是无监督学习里面的一种,主要是希望能够学习到一种 通用的特征表达 用于 下游任务 (Downstream Tasks) 。 其主要的方式就是通过自己监督自己。作为代表作的 kaiming 的 MoCo 引发一波热议, Yann Lecun也在 AAAI 上讲 Self-Supervised Learning 是未来的大势所趋。所以在这个系列中,我会系统地解读 Self-Supervised Learning 的经典工作。 总结下 Self-Supervised Learning 的方法,用 4 个英文单词概括一下就是: Unsupervised Pre-train, Supervised Fine-tune. 这段话先放在这里,可能你现在还不一定完全理解,后面还会再次提到它。 在预训练阶段我们使用 无标签的数据集 (unlabeled data) ,因为有标签的数据集 很贵...
Self-Supervised
2026-01-23
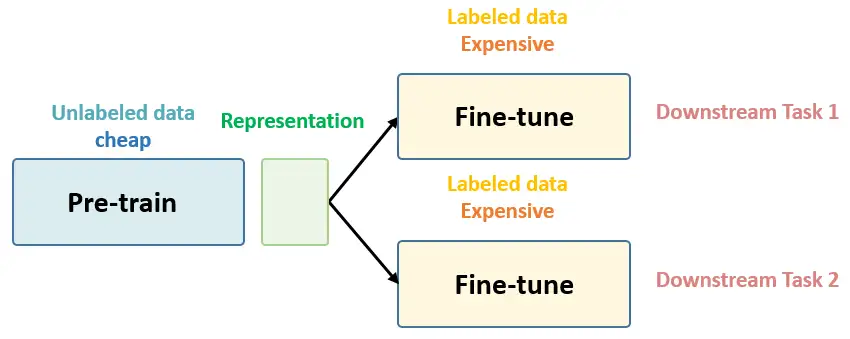
总结下 Self-Supervised Learning 的方法,用 4 个英文单词概括一下就是: Unsupervised Pre-train, Supervised Fine-tune. 在预训练阶段我们使用 无标签的数据集 (unlabeled data) ,因为有标签的数据集 很贵 ,打标签得要多少人工劳力去标注,那成本是相当高的,所以这玩意太贵。相反,无标签的数据集网上随便到处爬,它 便宜 。在训练模型参数的时候,我们不追求把这个参数用带标签数据从 初始化的一张白纸 给一步训练到位,原因就是数据集太贵。于是 Self-Supervised Learning 就想先把参数从 一张白纸 训练到 初步成型 ,再从 初步成型 训练到 完全成型 。注意这是2个阶段。这个 训练到初步成型的东西 ,我们把它叫做 Visual Representation 。预训练模型的时候,就是模型参数从 一张白纸 到 初步成型 的这个过程,还是用无标签数据集。等我把模型参数训练个八九不离十,这时候再根据你 下游任务 (Downstream Tasks) 的不同去用带标签的数据集把参数训练到 完全成型...