3D Model
2026-02-13
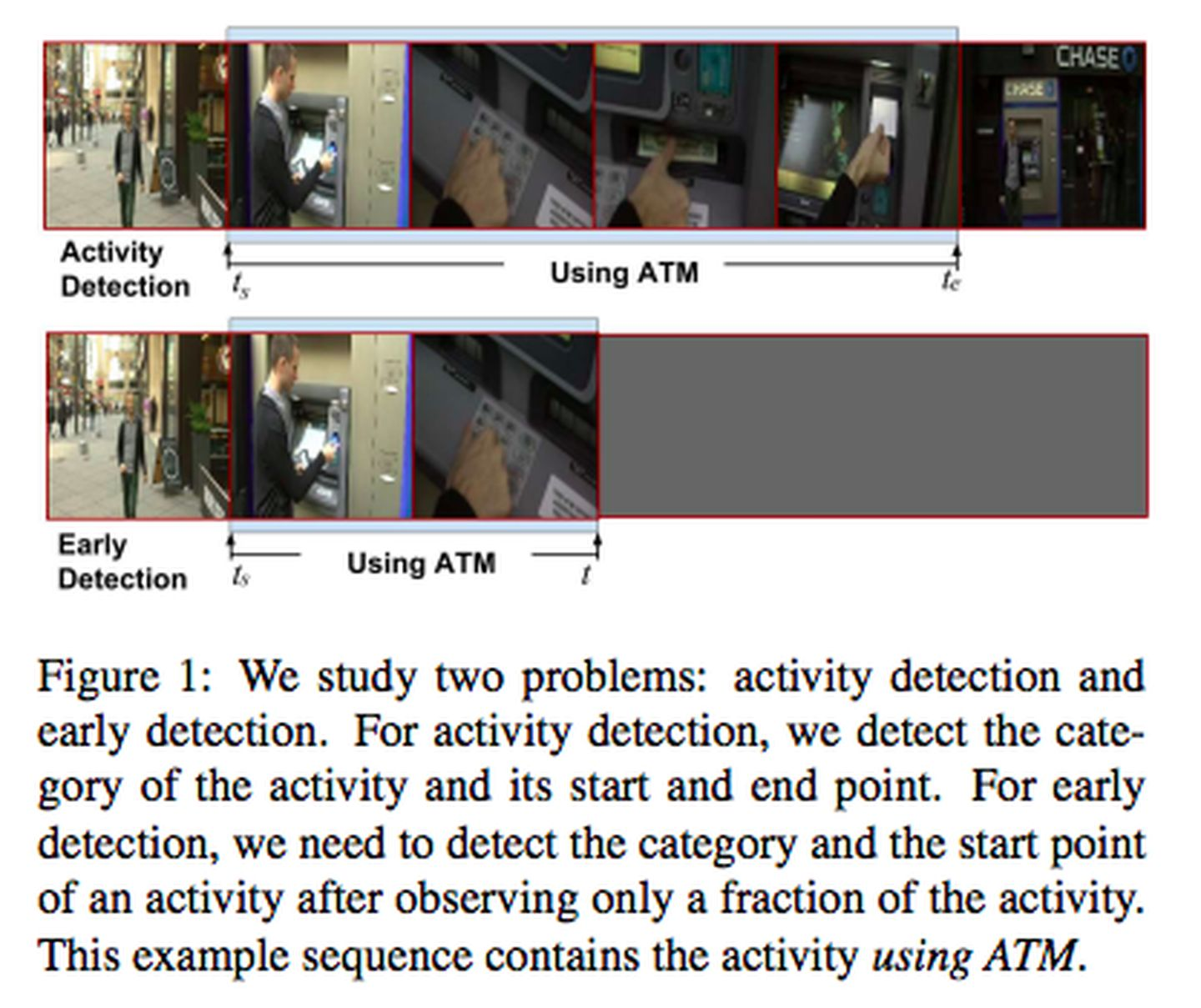
Temporal action detection可以分为两种setting, 一是offline的,在检测时视频是完整可得的,也就是可以利用完整的视频检测动作发生的时间区间(开始时间+结束时间)以及动作的类别; 二是 online的,即处理的是一个视频流,需要在线的检测(or 预测未来)发生的动作类别,但无法知道检测时间点之后的内容。online的问题设定更符合surveillance的需求,需要做实时的检测或者预警;offline的设定更符合视频搜索的需求,比如youtube可能用到的 highlight detection / preview generation。 问题演化 Early action detection -> Online action detection -> Online action anticipation: 在学术界关注online action detection之前,有一个相似的问题叫做 early event detection ,问题定义是 “detect the event as soon as possible, after it...