
11. 盛最多水的容器 题目 给定一个长度为 n 的整数数组 height 。有 n 条垂线,第 i 条线的两个端点是 (i, 0) 和 (i, height[i]) 。 找出其中的两条线,使得它们与 x 轴共同构成的容器可以容纳最多的水。 返回容器可以储存的最大水量。 说明: 你不能倾斜容器。 示例 1: 输入:[1,8,6,2,5,4,8,3,7]
输出:49
解释:图中垂直线代表输入数组 [1,8,6,2,5,4,8,3,7]。在此情况下,容器能够容纳水(表示为蓝色部分)的最大值为 49。 示例 2: 输入:height = [1,1]
输出:1 提示: n == height.length 2 <= n <= 10 5 0 <= height[i] <= 10 4 题解 在初始时,左右指针分别指向数组的左右两端,它们可以容纳的水量为 \(min(1,7)∗8=8\) 。 此时我们需要移动一个指针。移动哪一个呢?直觉告诉我们,应该移动对应数字较小的那个指针(即此时的左指针)。这是因为,由于容纳的水量是由 两个指针指向的数字中较小值∗指针之间的距离...
NLP
2026-01-24

旋转式位置编码(ROPE) 原始的Sinusoidal位置编码总的感觉是一种“想要成为相对位置编码的绝对位置编码”。一般来说,绝对位置编码具有实现简单、计算速度快等优点,而相对位置编码则直接地体现了相对位置信号,跟我们的直观理解吻合,实际性能往往也更好。由此可见,如果可以通过绝对位置编码的方式实现相对位置编码,那么就是“集各家之所长”、“鱼与熊掌兼得”了。Sinusoidal位置编码隐约做到了这一点,但并不够好。 本文将会介绍我们自研的Rotary Transformer(RoFormer)模型,它的主要改动是应用了笔者构思的“旋转式位置编码(Rotary Position Embedding,RoPE)”,这是一种配合Attention机制能达到“绝对位置编码的方式实现相对位置编码”的设计。而也正因为这种设计,它还是目前唯一一种可用于线性Attention的相对位置编码。 RoFormer:https://github.com/ZhuiyiTechnology/roformer 基本思路 这里简要介绍过RoPE: Transformer位置编码...
NLP
2026-01-24
不同于RNN、CNN等模型,对于Transformer模型来说,位置编码的加入是必不可少的,因为纯粹的Attention模块是无法捕捉输入顺序的,即无法区分不同位置的Token。为此我们大体有两个选择: 想办法将位置信息融入到输入中,这构成了绝对位置编码的一般做法; 想办法微调一下Attention结构,使得它有能力分辨不同位置的Token,这构成了相对位置编码的一般做法。 虽然说起来主要就是绝对位置编码和相对位置编码两大类,但每一类其实又能衍生出各种各样的变种,为此研究人员可算是煞费苦心、绞尽脑汁了,此外还有一些不按套路出牌的位置编码。本文就让我们来欣赏一下研究人员为了更好地表达位置信息所构建出来的“八仙过海,各显神通”般的编码方案。 绝对位置编码 形式上来看,绝对位置编码是相对简单的一种方案,但即便如此,也不妨碍各路研究人员的奇思妙想,也有不少的变种。一般来说,绝对位置编码会加到输入中:在输入的第 𝑘 个向量 \(𝑥_𝑘\) 中加入位置向量 \(𝑝_𝑘\) 变为 \(\boldsymbol{x}_k + \boldsymbol{p}_k\) ,其中 \(...
Generative Model
2026-01-18

简介 如果以概率的视角看待世界的生成模型。 在这样的世界观中,我们可以将任何类型的观察数据(例如 \(D\) )视为来自底层分布(例如 \( p_{data}\) )的有限样本集。 任何生成模型的目标都是在访问数据集 \(D\) 的情况下近似该数据分布。 如果我们能够学习到一个好的生成模型,我们可以将学习到的模型用于下游推理。 我们主要对数据分布的参数近似感兴趣,在一组有限的参数中,它总结了关于数据集 \(D\) 的所有信息。 与非参数模型相比,参数模型在处理大型数据集时能够更有效地扩展,但受限于可以表示的分布族。 在参数的设置中,我们可以将学习生成模型的任务视为在模型分布族中挑选参数,以最小化模型分布和数据分布之间的距离。 如上图,给定一个狗的图像数据集,我们的目标是学习模型族 \(M\) 中生成模型 θ 的参数,使得模型分布 \(p_θ\) 接近 \(p_{data}\) 上的数据分布。 在数学上,我们可以将我们的目标指定为以下优化问题: \[\mathop{min}\limits_{\theta\in M}d(p_\theta,p_{data})\] 其中, \(d()\)...
Generative Model
2026-01-18
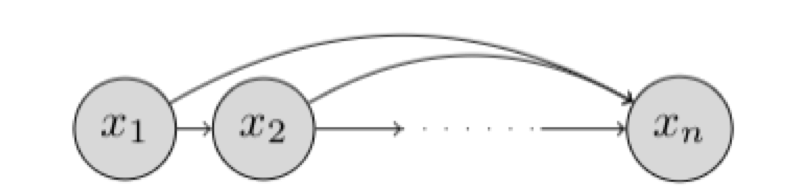
研究对象与基本设定 我们希望学习一个能够“生成数据”的概率模型。假设我们有一个数据集 \(D\) ,每个样本是 \(n\) 维二值向量: \(x \in \{0,1\}^n\) 我们的目标是用一个参数化分布 \(p_\theta(x)\) 去逼近真实数据分布 \(p_{\text{data}}(x)\) ,并最终能够: 密度估计 :给定 \(x\) 计算 \(p_\theta(x)\) 或 \(\log p_\theta(x)\) 采样生成 :从 \(p_\theta(x)\) 采样得到新的 \(x\) 表示:链式法则与自回归分解 链式法则分解联合分布 任意联合分布都可用概率链式法则分解为条件概率的乘积: \[p(x) = \prod_{i=1}^{n} p(x_i \mid x_1, x_2, \dots, x_{i-1}) = \prod_{i=1}^{n} p(x_i \mid x_{<i})\] 其中: \(x_{<i} = [x_1, x_2, \dots, x_{i-1}]\) ,这意味着:只要我们能为每个维度 \(i\) 学好一个条件分布 \(p(x_i \mid...
Self-Supervised
2026-01-18
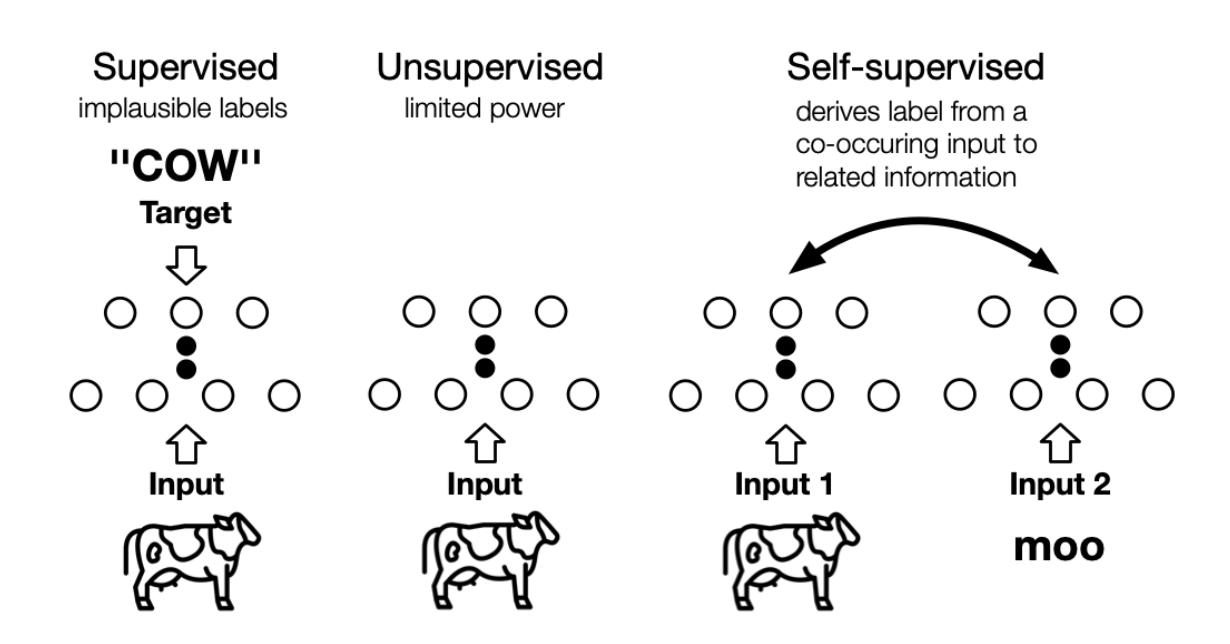
the machine predicts any parts of its input for any observed part 这是LeCun在AAAI 2020上对自监督学习的定义,再结合传统的自监督学习定义,可以总结如下两点特征: 通过“半自动”过程从数据本身获取“标签”; 从“其他部分”预测部分数据。 个人理解, 其实任意挖掘对象之间联系、探索不同对象共同本质的方法,都或多或少算是自监督学习的思想 。 自监督学习与无监督学习的区别主要在于,无监督学习专注于检测特定的数据模式,如聚类、社区发现或异常检测,而自监督学习的目标是恢复(recovering),仍处于监督学习的范式中。上图展示了三者之间的区别, 自监督中的“related information” 可以来自其他模态、输入的其他部分以及输入的不同形式。 Self-Supervised...
Computer Vision
2026-01-11
超多分类的Softmax 2014年CVPR两篇超多分类的人脸识别论文:DeepFace和DeepID DeepFace Taigman Y, Yang M, Ranzato M A, et al. Deepface: Closing the gap to humanlevel performance in face verification [C]// CVPR, 2014. 4.4M训练集,训练6层CNN + 4096特征映射 + 4030类Softmax,综合如3D Aligement, model ensembel等技术,在LFW上达到97.35%。 DeepID Sun Y, Wang X, Tang X. Deep learning face representation fro...
Computer Vision
2026-01-11
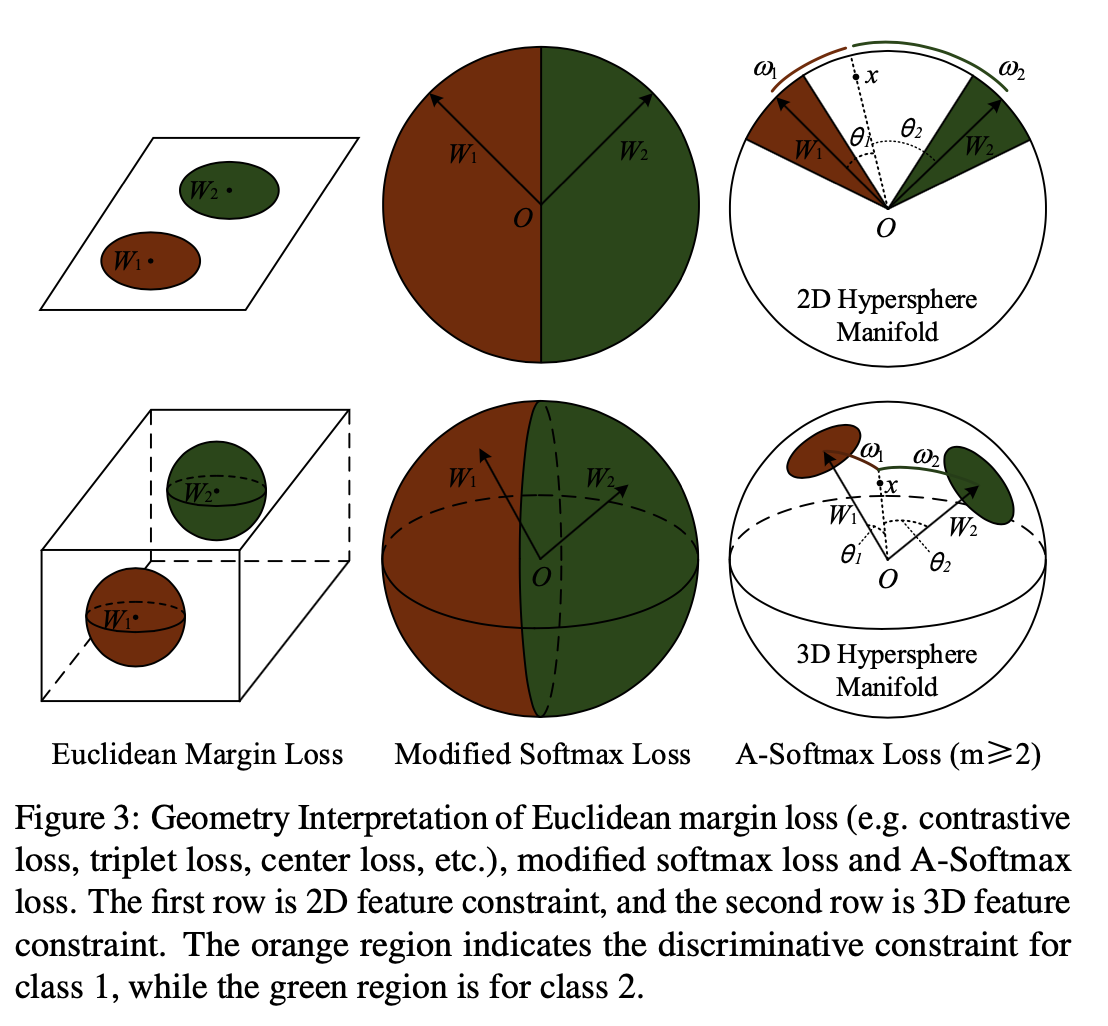
推导 回顾一下二分类下的Softmax后验概率,即: [公式] 显然决策的分界在当 𝑝_1=𝑝_2 时,所以决策界面是 (𝑊_1−𝑊_2)𝑥+𝑏_1−𝑏_2=0 。我们可以将 𝑊^𝑇_𝑖𝑥+𝑏_𝑖 写成 ‖W_i^T‖⋅‖x‖cos(θ_i)+b_i ,其中 θ_i 是 W_i 与 x 的夹角,如对 W_i 归一化且设偏置 b_i 为零( ‖W_i‖=1 , b_i=0 ),那么当 p_1=p_2 时,我们有 cos(θ_1)−cos(θ_2)=0 。从这里可以看到,如里一个输入的数据特征 x_i 属于 𝑦_𝑖 类,那么 θ_{y_i} 应该比其它所有类的角度都要小,也就是说在向量空间中 W_{y_i} 要更靠近 x_i 。 我们用的是Softmax Loss,对于输入 x_i ,So...
Generative Model
2026-01-11

给定一个包含 n 维数据 x 的数据集 D , 简单起见,假设数据 [Math] . 由于真正对联合分布建模的时候, x,y 都是随机变量,故而只需讨论 p(X)=p(x_1,...,x_n) 即可,毕竟只需要令 x_n=y 即可。 给定一个具体的任务,如MNIST中的手写数字二值图分类,从Generative的角度进行Represent,并在Inference中Learning. 下面先介绍: 描述如何对这个MINST任务建模 p(X,Y) (Representation) 对MNIST任务建模 对于一张pixel为 [Math] 大小的图片,令 x_1 表示第一个pixel的随机变量, [Math] ,需明确: 任务目标:学习一个模型分布 [Math] ,使采样时 [Math] , x ...
Computer Vision
2026-01-11

简介 一个完整的人脸识别系统包含以下几个模块 Face Detection: 人脸检测 Face Alignment:基于人脸关键点坐标对齐到正则坐标系下坐标 Face Recognition:基于对齐人脸进行识别 人脸识别的算法流程 人脸的识别流程:面部姿态处理(处理姿态,亮度,表情,遮挡),特征提取,人脸比对。 面部处理 face processing 这部分主要对姿态(主要)、亮度、表情、遮挡进行处理,可提升FR模型性能 主要包含两种处理方式: 1. "Onetomany Augmentation": 从单个图像生成不同姿态的图像,使模型学习到姿态不变性的表示 1. "Manytoone Normalization": 从多个不同姿态的图像中恢复人脸图像的标准视图 特征提取 Backb...
Computer Vision
2026-01-11
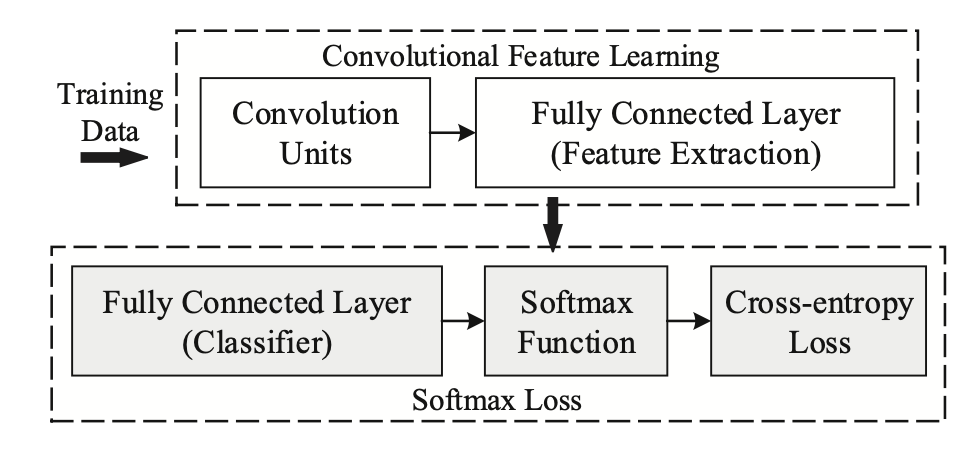
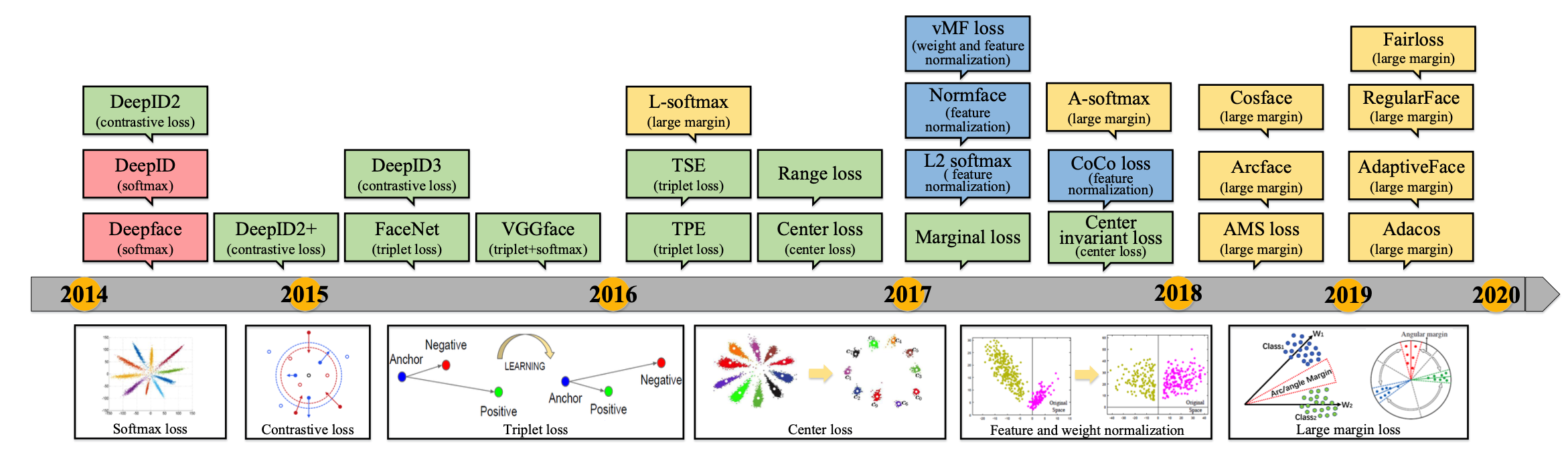
近期,人脸识别研究领域的主要进展之一集中在了 Softmax Loss 的改进之上;本文从两种主要的改进方式——做归一化以及增加类间 margin——展开梳理,介绍了近年来基于 Softmax 的 Loss 的研究进展。 Softmax简介 Softmax Loss 因为其易于优化,收敛快等特性被广泛应用于图像分类领域。然而,直接使用 softmax loss 训练得到的 feature 拿到 retrieval,verification 等“需要设阈值”的任务时,往往并不够好。 这其中的原因还得从 Softmax 的本身的定义说起,Softmax loss 在形式上是 softmax 函数加上交叉熵损失,它的目的是让所有的类别在概率空间具有最大的对数似然,也就是保证所有的类别都能分类正确,...