Deep Learning
2026-04-09
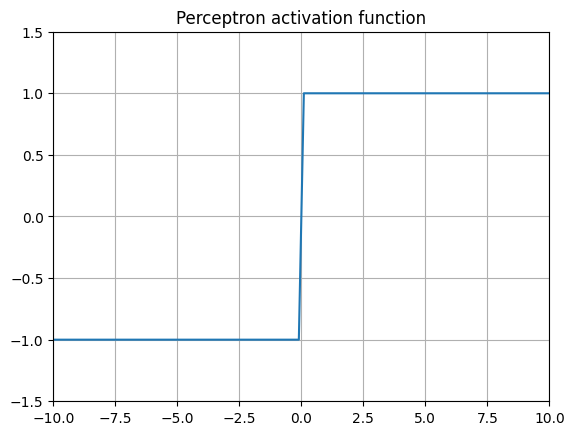
最近,似乎现在每个大型语言模型(LLM)和新闻中提到的复杂神经网络架构都使用略有不同的激活函数,而就在几年前,最常见的做法只是在神经网络的内部层中使用 ReLU。 曾经优秀的 ReLUs 怎么了,以及是什么促使最新的大型语言模型(LLMs)的创造者们开始使用不同的(更高级的)激活函数? Threshold activation (Perceptron) 1957 年,罗森布拉特建造了“感知机” 最古老的激活函数是基本感知器。它由芝加哥大学精神病学系的爱德华·麦克洛奇和沃尔特·皮茨构思,后来由弗兰克·罗森布拉特在 1957 年于康奈尔航空实验室为美国海军在硬件上更著名地实现了。该算法非常简单,其基本规则是:如果某个值超过某个阈值,则返回 1,否则返回 0。有些变体会返回 1 或-1。 由于其二元特性,除了某一点外,其导数为 0。这意味着权重无法通过反向传播等技术与网络提供的标签成比例地缩放。 多层感知器会简化为线性函数,使得它难以处理非线性可分的数据,比如这两个甜甜圈点云。 Sigmoid \[sigmoid(x) = \frac{1}{1 + e^{-x}}\] logistic...