
11. 盛最多水的容器 题目 给定一个长度为 n 的整数数组 height 。有 n 条垂线,第 i 条线的两个端点是 (i, 0) 和 (i, height[i]) 。 找出其中的两条线,使得它们与 x 轴共同构成的容器可以容纳最多的水。 返回容器可以储存的最大水量。 说明: 你不能倾斜容器。 示例 1: 输入:[1,8,6,2,5,4,8,3,7]
输出:49
解释:图中垂直线代表输入数组 [1,8,6,2,5,4,8,3,7]。在此情况下,容器能够容纳水(表示为蓝色部分)的最大值为 49。 示例 2: 输入:height = [1,1]
输出:1 提示: n == height.length 2 <= n <= 10 5 0 <= height[i] <= 10 4 题解 在初始时,左右指针分别指向数组的左右两端,它们可以容纳的水量为 \(min(1,7)∗8=8\) 。 此时我们需要移动一个指针。移动哪一个呢?直觉告诉我们,应该移动对应数字较小的那个指针(即此时的左指针)。这是因为,由于容纳的水量是由 两个指针指向的数字中较小值∗指针之间的距离...
NLP
2026-01-24

旋转式位置编码(ROPE) 原始的Sinusoidal位置编码总的感觉是一种“想要成为相对位置编码的绝对位置编码”。一般来说,绝对位置编码具有实现简单、计算速度快等优点,而相对位置编码则直接地体现了相对位置信号,跟我们的直观理解吻合,实际性能往往也更好。由此可见,如果可以通过绝对位置编码的方式实现相对位置编码,那么就是“集各家之所长”、“鱼与熊掌兼得”了。Sinusoidal位置编码隐约做到了这一点,但并不够好。 本文将会介绍我们自研的Rotary Transformer(RoFormer)模型,它的主要改动是应用了笔者构思的“旋转式位置编码(Rotary Position Embedding,RoPE)”,这是一种配合Attention机制能达到“绝对位置编码的方式实现相对位置编码”的设计。而也正因为这种设计,它还是目前唯一一种可用于线性Attention的相对位置编码。 RoFormer:https://github.com/ZhuiyiTechnology/roformer 基本思路 这里简要介绍过RoPE: Transformer位置编码...
NLP
2026-01-24
不同于RNN、CNN等模型,对于Transformer模型来说,位置编码的加入是必不可少的,因为纯粹的Attention模块是无法捕捉输入顺序的,即无法区分不同位置的Token。为此我们大体有两个选择: 想办法将位置信息融入到输入中,这构成了绝对位置编码的一般做法; 想办法微调一下Attention结构,使得它有能力分辨不同位置的Token,这构成了相对位置编码的一般做法。 虽然说起来主要就是绝对位置编码和相对位置编码两大类,但每一类其实又能衍生出各种各样的变种,为此研究人员可算是煞费苦心、绞尽脑汁了,此外还有一些不按套路出牌的位置编码。本文就让我们来欣赏一下研究人员为了更好地表达位置信息所构建出来的“八仙过海,各显神通”般的编码方案。 绝对位置编码 形式上来看,绝对位置编码是相对简单的一种方案,但即便如此,也不妨碍各路研究人员的奇思妙想,也有不少的变种。一般来说,绝对位置编码会加到输入中:在输入的第 𝑘 个向量 \(𝑥_𝑘\) 中加入位置向量 \(𝑝_𝑘\) 变为 \(\boldsymbol{x}_k + \boldsymbol{p}_k\) ,其中 \(...
Large Model
2026-01-23
总览 由于是“图文多模态”,还是要从“图”和“文”的表征方法讲起,然后讲清楚图文表征的融合方法。这里只讲两件事情: 视觉表征 :分为两个部分问题,一是如何合理建模视觉输入特征,二是如何通过预训练手段进行充分学习表征,这两点是基于视觉完成具体算法任务的基础; 视觉与自然语言的对齐(Visul Language Alignment)或融合 :目的是将视觉和自然语言建模到同一表征空间并进行融合,实现自然语言和视觉语义的互通,这点同样离不开预训练这一过程。模态对齐是处理多模态问题的基础,也是现在流行的多模态大模型技术前提。 对于视觉表征,从发展上可以分为卷积神经网络(CNN)和Vision Transformer(VIT)两大脉络,二者分别都有各自的表征、预训练以及多模态对齐的发展过程。而对于VIT线,另有多模态大模型如火如荼的发展,可谓日新月异。 CNN:视觉理解的一代先驱 点击展开 卷积视觉表征模型和预训练...
Computer Vision
2026-01-21
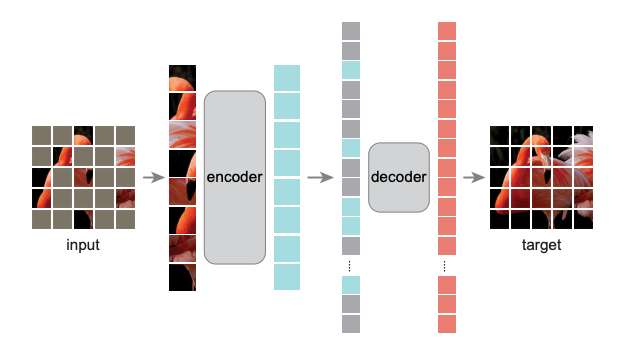
导言 自监督学习(Self-Supervised Learning)能利用大量无标注的数据进行表征学习,然后在特定下游任务上对参数进行微调。通过这样的方式,能够在较少有标注数据上取得优于有监督学习方法的精度。近年来,自监督学习受到了越来越多的关注,如Yann Lecun也在 AAAI 上讲 Self-Supervised Learning 是未来的大势所趋。在CV领域涌现了如SwAV、MOCO、DINO、MoBY等一系列工作。MAE是kaiming继MOCO之后在自监督学习领域的又一力作。首先,本文会对MAE进行解读,然后基于EasyCV库的精度复现过程及其中遇到的一些问题作出解答。 概述 MAE的做法很简单:随机mask掉图片中的一些patch,然后通过模型去重建这些丢失的区域。包括两个核心的设计:1.非对称编码-解码结构 2.用较高的掩码率(75%)。通过这两个设计MAE在预训练过程中可以取得3倍以上的训练速度和更高的精度,如ViT-Huge能够通过ImageNet-1K数据上取得87.8%的准确率。 模型拆解...
Computer Vision
2026-01-21

概述 在计算机视觉领域(CV),对视觉特征的理解CNN是长期处于主导地位的。而在NLP领域,Transformer框架的巨大成功,也激发了不少研究者探索将Transformer用于计算机视觉任务。ViT(Vision Transformer)的出现标志着在CV领域Transformer架构迈出了重要的一步。尤其在当前结合LLM的多模态探索上(MM-LLM),都是以LLM大语言模型为骨干架构的模型,多种模态的信息需要先做token化处理,再输入到LLM模型。ViT天然具有序列化特征的建模能力,自然在MM-LLM探索中大放异彩~ ViT在多模态模型中的角色类似于自然语言建模中的Tokenizer组件,对图像进行视觉特征编码,产出图像的序列特征。只不过ViT的编码过程本身也是采用了Transformer的模型结构。 本文主要结合几篇paper和源码讲讲ViT和针对ViT的一些优化方法~ ViT(Vision Transformer)...
Computer Vision
2026-01-21
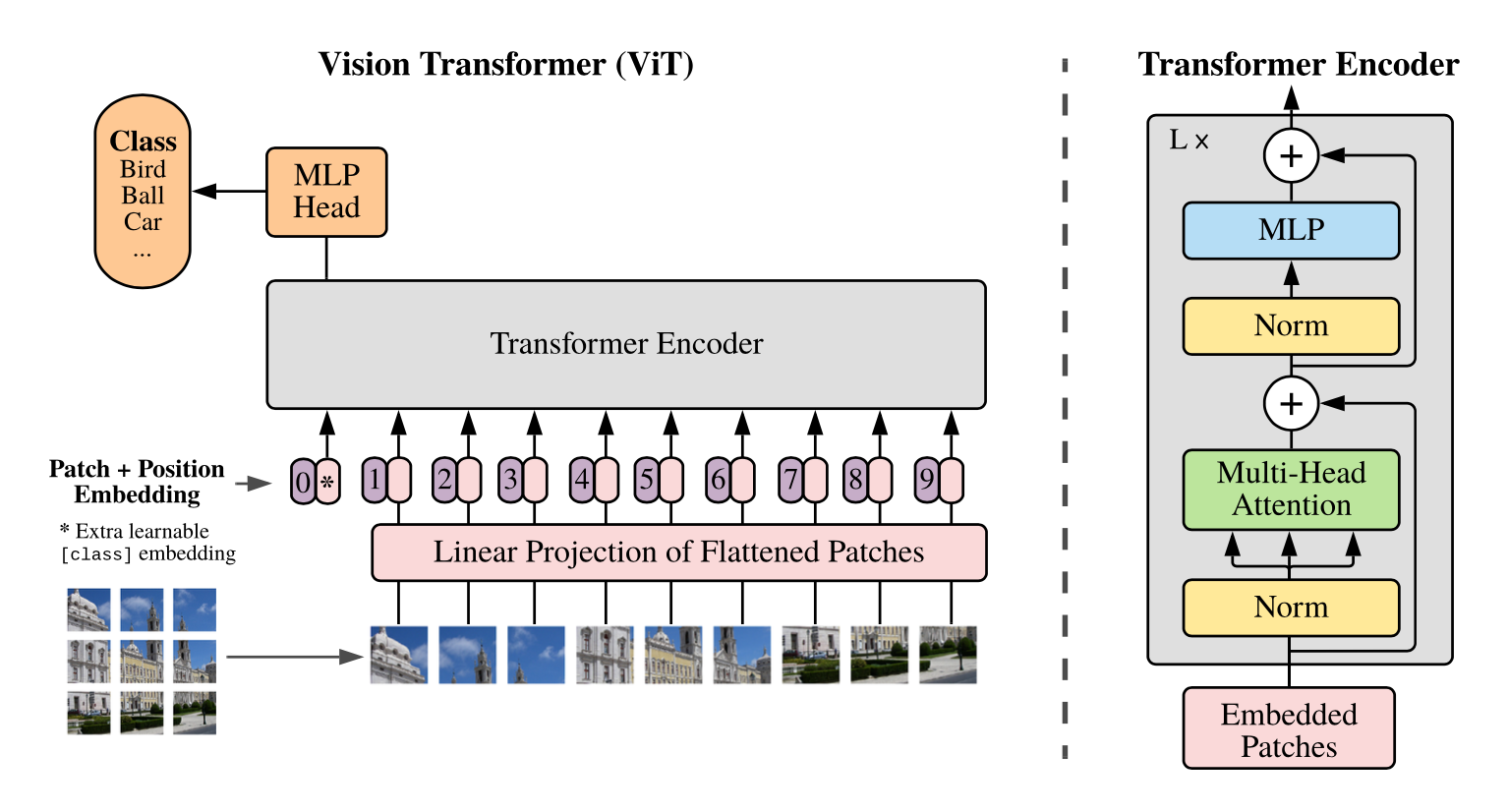
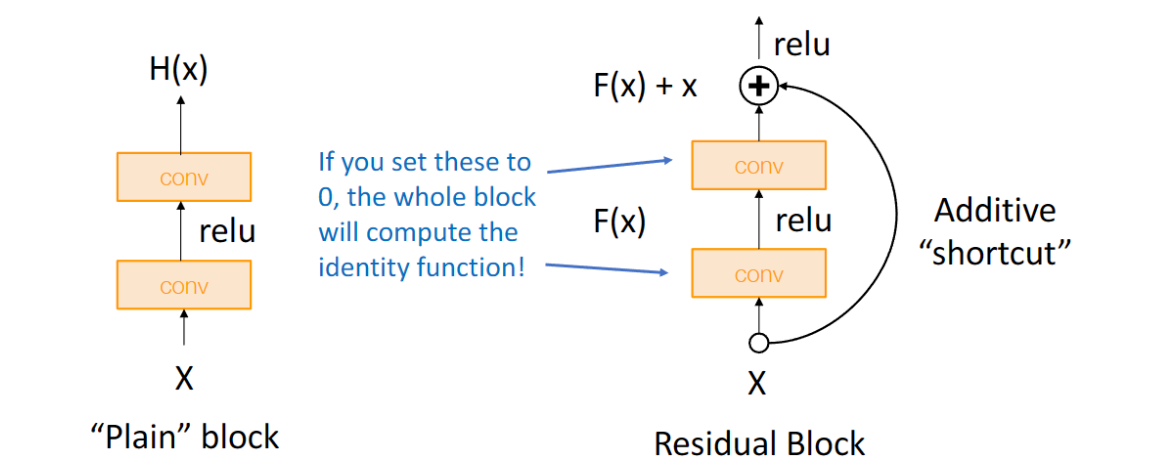
ViT(vision transformer)是Google在2020年提出的直接将transformer应用在图像分类的模型,后面很多的工作都是基于ViT进行改进的。ViT的思路很简单:直接把图像分成固定大小的patchs,然后通过线性变换得到patch embedding,这就类比NLP的words和word embedding,由于transformer的输入就是a sequence of token embeddings,所以将图像的patch embeddings送入transformer后就能够进行特征提取从而分类了。ViT模型原理如下图所示,其实ViT模型只是用了transformer的Encoder来提取特征(原始的transformer还有decoder部分,用于实现sequence to sequence,比如机器翻译)。下面将分别对各个部分做详细的介绍。 Patch Embedding 对于ViT来说,首先要将原始的2-D图像转换成一系列1-D的patch embeddings,这就好似NLP中的word embedding。输入的2-D图像记为 \(x\in...
Large Model
2026-01-20
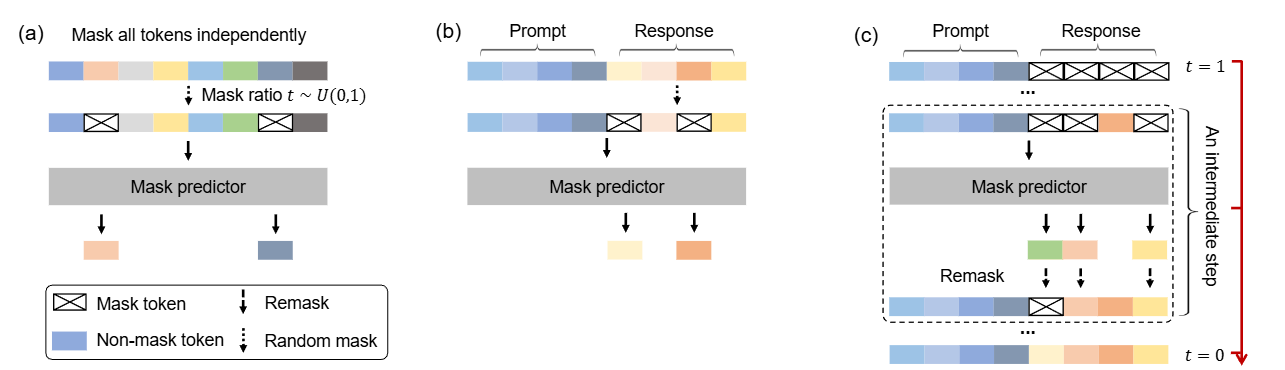
这是一篇尝试改变LLM「范式」的文章:当前主流的LLM架构都是「自回归」的,通俗地理解就是必须「从左到右依次生成」。这篇文章挑战了这一范式,探索扩散模型在 LLMs 上的可行性,通过 随机掩码 - 预测 的逆向思维,让模型学会「全局思考」。 论文: [2502.09992] Large Language Diffusion Models 背景 主流大语言模型架构:自回归模型 (Autoregressive LLMs) 过去几年, 自回归模型(Autoregressive Models, ARMs)一直是大语言模型(LLM)的主流架构。典型的自回归语言模型以Transformer解码器为基础,按照从左到右 的顺序依次预测下一个词元(token)。 形式化地,自回归模型将一个长度为 \(N\) 的文本序列 \(X=(x_1, x_2, ..., x_N)\) 的概率分解为各位置的条件概率连乘积: \[P_{\theta}(x_1, x_2, \dots, x_N) = \prod_{i=1}^{N} P_{\theta}(x_i \mid x_1, x_2, \dots,...
Large Model
2026-01-20
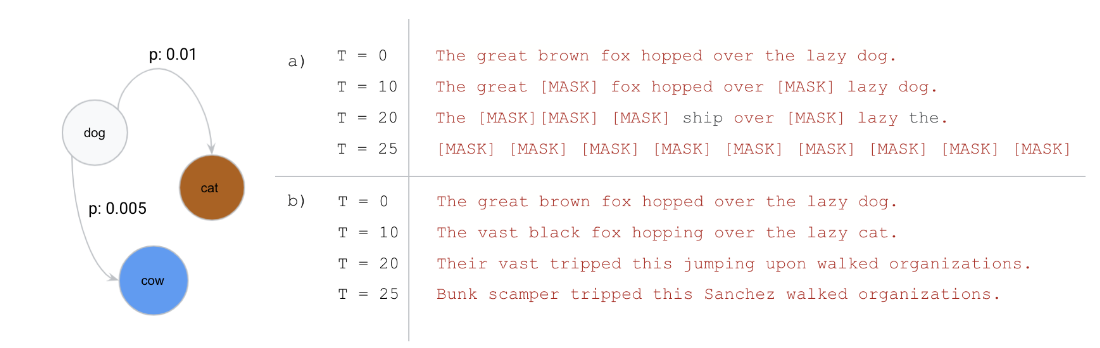
引言 Diffusion模型近年来在图像生成这一连续域任务中取得了显著成果,展现出强大的生成能力。然而,在文本生成这一离散域任务中整体效果仍不尽如人意,未能在该领域引起广泛关注。 去年,一篇研究离散扩散模型在文本生成的文章《Discrete Diffusion Modeling by Estimating the Ratios of the Data Distribution》获得ICML 2024的Best Paper,引发了学术界的广泛兴趣,也激发了新一轮的研究热潮。随后在2025年,越来越多高校和企业也开始积极探索基于Diffusion的文本生成方法。其中,近期备受关注的Block Diffusion也成功入选ICLR oral,进一步推动了该方向的发展。...
Large Model
2026-01-15
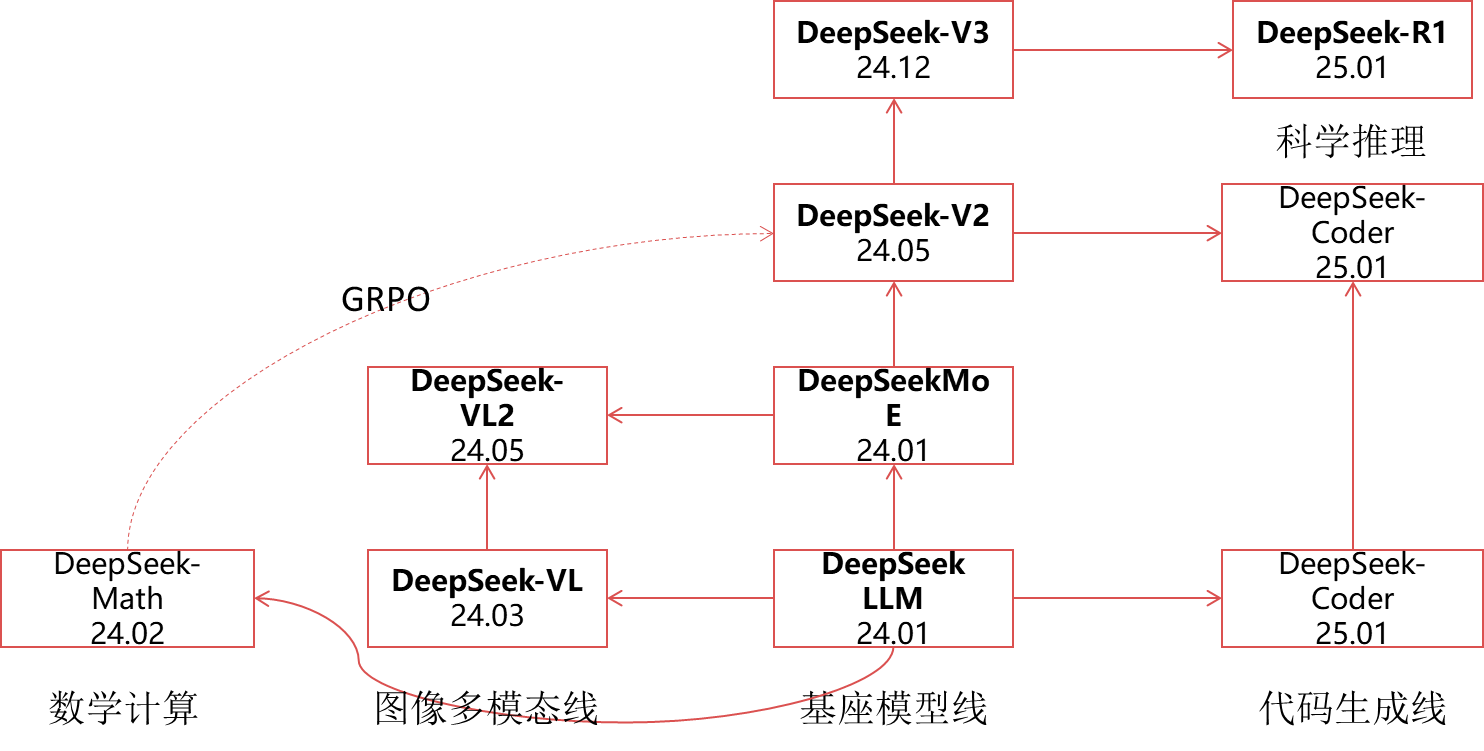
🔖 https://www.deepseek.com/ DeepSeek LLM 代码地址: https://github.com/deepseek-ai/DeepSeek-LLM 背景 量化巨头幻方探索AGI(通用人工智能)新组织“深度求索”在成立半年后,发布的第一代大模型,免费商用,完全开源。作为一家隐形的AI巨头,幻方拥有1万枚英伟达A100芯片,有手撸的HAI-LLM训练框架HAI-LLM:高效且轻量的大模型训练工具。 概述 DeepSeek LLMs,这是一系列在2万亿标记的英语和中文大型数据集上从头开始训练的开源模型 在本文中,深入解释了超参数选择、Scaling Laws以及做过的各种微调尝试。校准了先前工作中的Scaling Laws,并提出了新的最优模型/数据扩展-缩放分配策略。此外,还提出了一种方法,使用给定的计算预算来预测近似的batch-size和learning-rate。进一步得出结论,Scaling Laws与数据质量有关,这可能是不同工作中不同扩展行为的原因。在Scaling Laws的指导下,使用最佳超参数进行预训练,并进行全面评估。...
Large Model
2026-01-15

简介 后训练(post-training)已成为完整训练流程中的重要组成部分。相比于预训练,后训练需要的计算资源相对较少,但能够: 提高推理任务的准确性 使模型与社会价值观保持一致 适应用户偏好 OpenAI 的 o1 系列模型首次引入了通过增加思维链(Chain-of-Thought)推理过程长度来实现推理时间,扩展这种方法在数学、编程和科学推理等各种推理任务上取得了显著改进 研究界已探索多种方法来提高模型的推理能力:比如 基于过程的奖励模型 (Process-based Reward Models) 强化学习 (Reinforcement Learning), 代表工作:InstructGPT, 以及 搜索算法( 蒙特卡洛树搜索(Monte Carlo Tree Search)、束搜索(Beam Search))。然而,这些方法尚未达到与 OpenAI o1 系列模型相当的通用推理性能。 DeepSeek-R1-Zero 本文首先探索使用纯强化学习(RL)来提高语言模型的推理能力,重点关注: 探索 LLM 在没有任何监督数据的情况下,通过纯 RL 过程的自我进化来发展推理能力...
Large Model
2026-01-15

简介 24年12月,研究团队开发了 DeepSeek-V3,这是一个基于 MoE 架构的大模型,总参数量达到 671B,其中每个 token 会激活 37B 个参数。 基于提升性能和降低成本的双重目标,在架构设计方面,DeepSeek-V3 采用了 MLA 来确保推理效率,并使用 DeepSeekMoE 来实现经济高效的训练。这两种架构在 DeepSeek-V2 中已经得到验证,证实了它们能够在保持模型性能的同时实现高效的训练和推理。 除了延续这些基础架构外,研究团队还引入了两项创新策略来进一步提升模型性能。 首先,DeepSeek-V3 首创了 无辅助损失的负载均衡 策略(auxiliary-loss-free strategy for load balancing),有效降低了负载均衡对模型性能的负面影响。另外,DeepSeek-V3 采用了 多 token 预测训练目标, 这种方法在评估基准测试中展现出了显著的性能提升。 为了提高训练效率,该研究采用了 FP8 混合精度训练技术...