76. 最小覆盖子串 题目 给定两个字符串 s 和 t ,长度分别是 m 和 n ,返回 s 中的 最短窗口 子串 ,使得该子串包含 t 中的每一个字符( 包括重复字符 )。如果没有这样的子串,返回空字符串 "" 。 测试用例保证答案唯一。 示例 1: 输入:s = "ADOBECODEBANC", t = "ABC"
输出:"BANC"
解释:最小覆盖子串 "BANC" 包含来自字符串 t 的 'A'、'B' 和 'C'。 示例 2: 输入:s = "a", t = "a"
输出:"a"
解释:整个字符串 s 是最小覆盖子串。 示例 3: 输入: s = "a", t = "aa"
输出: ""
解释: t 中两个字符 'a' 均应包含在 s 的子串中,
因此没有符合条件的子字符串,返回空字符串。 提示: m == s.length n == t.length 1 <= m, n <= 10 5 s 和 t 由英文字母组成 题解 这是一个经典的 滑动窗口 (Sliding Window) 问题 我们需要维护一个动态的窗口 [left, right] : 右移扩大 :不断移动...
Large Model
2026-01-15

简介 后训练(post-training)已成为完整训练流程中的重要组成部分。相比于预训练,后训练需要的计算资源相对较少,但能够: 提高推理任务的准确性 使模型与社会价值观保持一致 适应用户偏好 OpenAI 的 o1 系列模型首次引入了通过增加思维链(Chain-of-Thought)推理过程长度来实现推理时间,扩展这种方法在数学、编程和科学推理等各种推理任务上取得了显著改进 研究界已探索多种方法来提高模型的推理能力:比如 基于过程的奖励模型 (Process-based Reward Models) 强化学习 (Reinforcement Learning), 代表工作:InstructGPT, 以及 搜索算法( 蒙特卡洛树搜索(Monte Carlo Tree Search)、束搜索(Beam Search))。然而,这些方法尚未达到与 OpenAI o1 系列模型相当的通用推理性能。 DeepSeek-R1-Zero 本文首先探索使用纯强化学习(RL)来提高语言模型的推理能力,重点关注: 探索 LLM 在没有任何监督数据的情况下,通过纯 RL 过程的自我进化来发展推理能力...
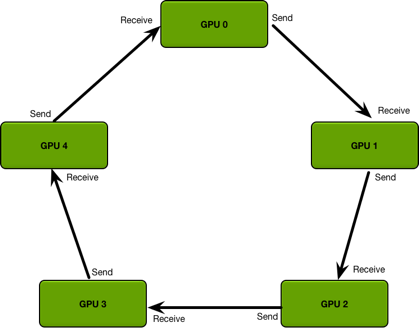
Quick Start 一个最简单的DDP Pytorch例子! 环境准备 PyTorch(gpu)=1.5,python=3.6 推荐使用官方打好的PyTorch docker,避免乱七八糟的环境问题影响心情。 [代码] 代码 单GPU代码 [代码] 加入DDP的代码 [代码] DDP的基本原理 大白话原理 假如我们有N张显卡, 1. (缓解GIL限制)在DDP模式下,会有N个进程被启动,每个进程在一张卡上加载一个模型,这些模型的参数在数值上是相同的。 1. (RingReduce加速)在模型训练时,各个进程通过一种叫RingReduce的方法与其他进程通讯,交换各自的梯度,从而获得所有进程的梯度; 1. (实际上就是Data Parallelism)各个进程用平均后的梯度更新自己的参数,...
Python
2026-01-11
@tf_export为函数取了个名字! Tensorflow经常看到定义的函数前面加了@tf_export。例如,tensorflow/python/platform/app.py中有: [代码] 首先,@tf_export是一个修饰符。修饰符的本质是一个函数 tf_export的实现在tensorflow/python/util/tf_export.py中: [代码] 等号的右边的理解分两步: 1. functools.partial 1. api_export functools.partial是偏函数,它的本质简而言之是为函数固定某些参数。如:functools.partial(FuncA, p1)的作用是把函数FuncA的第一个参数固定为p1;又如functools.partial(...
Deep Learning
2026-01-11

引言与背景 随机逼近(Stochastic Approximation)是一类用于求解寻根或优化问题的随机迭代算法,其特点是不需要知道目标函数或其导数的表达式。 随机逼近的核心优势在于: 能够处理带有随机噪声的观测数据 不需要目标函数的解析表达式 可以在线学习,每获得一个新样本就更新估计值 均值估计问题 考虑一个随机变量 X ,其取值来自有限集合 [Math] 。我们的目标是估计 E[X] 。假设我们有一个独立同分布的样本序列 \{x_i\}_{i=1}^n ,那么 X 的期望值可以近似为: [公式] 非增量方法与增量方法 非增量方法:先收集所有样本,然后计算平均值。缺点是如果样本数量很大,可能需要等待很长时间。 增量方法:定义 [公式] 可以推导出递归公式: [公式] 这个算法可以增量式地...
Reinforcement Learning
2026-01-11

引言与背景 蒙特卡洛方法是强化学习中的重要算法类别,它标志着从基于模型到无模型算法的转变。这类算法不依赖环境模型,而是通过与环境的直接交互获取经验数据来学习最优策略。 蒙特卡洛方法在强化学习算法谱系中处于"无模型"方法的起始位置,是从基于模型的方法(如值迭代和策略迭代)向无模型方法过渡的第一步。 无模型强化学习的核心理念可以简述为:如果没有模型,我们必须有数据;如果没有数据,我们必须有模型;如果两者都没有,我们就无法找到最优策略。在强化学习中,"数据"通常指智能体与环境交互的经验。 均值估计问题 在介绍蒙特卡洛强化学习算法之前,我们首先需要理解均值估计问题,这是理解从数据而非模型中学习的基础。 考虑一个可以取有限实数集合 X 中值的随机变量 X ,我们的任务是计算 X 的均值或期望值: E[...
Reinforcement Learning
2026-01-11

基础概念 GridWord Example 环境描述:网格世界是一个直观的二维环境,包含: 任务目标: 什么是强化学习:依据策略执行动作感知状态得到奖励 所谓强化学习(Reinforcement Learning,简称RL),是指基于智能体在复杂、不确定的环境中最大化它能获得的奖励,从而达到自主决策的目的。 a computational approach to learning whereby an agent tries to maximize the total amount of reward it receives while interacting with a complex and uncertain environment 经典的强化学习模型可以总结为下图的形式(你可以理解...
PyTorch中,所有神经网络的核心是 autograd 包。 autograd 包为张量上的所有操作提供了自动求导机制。它是一个在运行时定义(definebyrun)的框架,这意味着反向传播是根据代码如何运行来决定的,并且每次迭代可以是不同的. 让我们用一些简单的例子来看看吧。 张量 torch.Tensor 是这个包的核心类。如果设置它的属性 .requires_grad 为 True,那么它将会追踪对于该张量的所有操作。当完成计算后可以通过调用 .backward(),来自动计算所有的梯度。这个张量的所有梯度将会自动累加到.grad属性. 要阻止一个张量被跟踪历史,可以调用 .detach() 方法将其与计算历史分离,并阻止它未来的计算记录被跟踪。 为了防止跟踪历史记录(和使用内存),...
背景 RLHF 通常包括三个阶段: 有监督微调(SFT) 奖励建模阶段 (Reward Model) RL微调阶段 直接偏好优化(DPO) 传统的RLHF方法分两步走: 1. 先训练一个奖励模型来判断哪个回答更好 1. 然后用强化学习让语言模型去最大化这个奖励 这个过程很复杂,就像绕了一大圈:先学习"什么是好的",再学习"如何做好"。 DPO发现了一个数学上的捷径: 1. 关键发现:对于任何奖励函数,都存在一个对应的最优策略(语言模型);反过来说,任何语言模型也隐含着一个它认为最优的奖励函数 1. 直接优化:与其先训练奖励模型再训练语言模型,不如直接训练语言模型,让它自己内化"什么是好的" 1. 数学转换:DPO将"学习判断好坏"和"学习生成好内容"这两个任务合二为一,通过一个简单的数学变换...
Large Model
2026-01-11

模型概述 KimiVL 是一个高效的开源混合专家视觉语言模型(VLM),它提供先进的多模态推理、长上下文理解和强大的代理能力,同时在语言解码器中仅激活 2.8B 参数(KimiVLA3B)。该模型在多种挑战性任务中表现出色,包括一般用途的视觉语言理解、多轮代理任务、大学水平的图像和视频理解、OCR、数学推理和多图像理解等. 模型架构 KimiVL 的架构由三个主要部分组成: MoE语言模型 Moonlight MoE language model with only 2.8B activated (16B total) parameters 视觉模型 400M nativeresolution MoonViT vision encoder. MLP Projector MoonViT: 原生...
Large Model
2026-01-11

UITARS 简介 UITARS(User Interface Task Automation and Reasoning System)是由字节跳动(ByteDance)研发的原生 GUI 智能体模型: 输入方式:仅使用屏幕截图作为视觉输入 交互方式:执行类人操作(键盘输入、鼠标点击、拖拽等) 模型特性:端到端的原生智能体模型,无需复杂的中间件或框架 传统 GUI 智能体的开发往往依赖于文本信息,例如 HTML 结构和可访问性树。虽然这些方法取得了一些进展,但它们也存在一些局限性: 平台不一致性:不同平台的 GUI 结构差异很大,导致智能体难以跨平台通用。 信息冗余:文本信息往往过于冗长,增加了模型的处理负担。 访问限制:获取系统底层的文本信息通常需要较高的权限,限制了应用的范围。 模块化...
Python
2026-01-11
相同点 nn.Xxx和nn.functional.xxx的实际功能是相同的,即nn.Conv2d和nn.functional.conv2d 都是进行卷积,nn.Dropout 和nn.functional.dropout都是进行dropout,。。。。。; 运行效率也是近乎相同。 nn.functional.xxx是函数接口,而nn.Xxx是nn.functional.xxx的类封装,并且nn.Xxx都继承于一个共同祖先nn.Module。这一点导致nn.Xxx除了具有nn.functional.xxx功能之外,内部附带了nn.Module相关的属性和方法,例如train(), eval(),load_state_dict, state_dict 等。 不同点 两者的调用方式不同。 nn.X...