129. 滑动窗口最大值 题目 给你一个整数数组 nums ,有一个大小为 k 的滑动窗口从数组的最左侧移动到数组的最右侧。你只可以看到在滑动窗口内的 k 个数字。滑动窗口每次只向右移动一位。 返回 滑动窗口中的最大值 。 示例 1: 输入:nums = [1,3,-1,-3,5,3,6,7], k = 3
输出:[3,3,5,5,6,7]
解释:
滑动窗口的位置 最大值
--------------- -----
[1 3 -1] -3 5 3 6 7 3
1 [3 -1 -3] 5 3 6 7 3
1 3 [-1 -3 5] 3 6 7 5
1 3 -1 [-3 5 3] 6 7 5
1 3 -1 -3 [5 3 6] 7 6
1 3 -1 -3 5 [3 6 7] 7 示例 2: 输入:nums = [1], k = 1
输出:[1] 提示: 1 <= nums.length...
Generative Model
2026-01-18

简介 如果以概率的视角看待世界的生成模型。 在这样的世界观中,我们可以将任何类型的观察数据(例如 \(D\) )视为来自底层分布(例如 \( p_{data}\) )的有限样本集。 任何生成模型的目标都是在访问数据集 \(D\) 的情况下近似该数据分布。 如果我们能够学习到一个好的生成模型,我们可以将学习到的模型用于下游推理。 我们主要对数据分布的参数近似感兴趣,在一组有限的参数中,它总结了关于数据集 \(D\) 的所有信息。 与非参数模型相比,参数模型在处理大型数据集时能够更有效地扩展,但受限于可以表示的分布族。 在参数的设置中,我们可以将学习生成模型的任务视为在模型分布族中挑选参数,以最小化模型分布和数据分布之间的距离。 如上图,给定一个狗的图像数据集,我们的目标是学习模型族 \(M\) 中生成模型 θ 的参数,使得模型分布 \(p_θ\) 接近 \(p_{data}\) 上的数据分布。 在数学上,我们可以将我们的目标指定为以下优化问题: \[\mathop{min}\limits_{\theta\in M}d(p_\theta,p_{data})\] 其中, \(d()\)...
Generative Model
2026-01-18
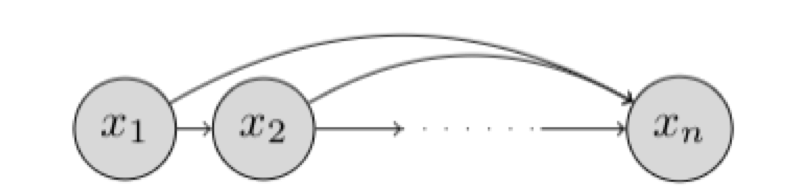
研究对象与基本设定 我们希望学习一个能够“生成数据”的概率模型。假设我们有一个数据集 \(D\) ,每个样本是 \(n\) 维二值向量: \(x \in \{0,1\}^n\) 我们的目标是用一个参数化分布 \(p_\theta(x)\) 去逼近真实数据分布 \(p_{\text{data}}(x)\) ,并最终能够: 密度估计 :给定 \(x\) 计算 \(p_\theta(x)\) 或 \(\log p_\theta(x)\) 采样生成 :从 \(p_\theta(x)\) 采样得到新的 \(x\) 表示:链式法则与自回归分解 链式法则分解联合分布 任意联合分布都可用概率链式法则分解为条件概率的乘积: \[p(x) = \prod_{i=1}^{n} p(x_i \mid x_1, x_2, \dots, x_{i-1}) = \prod_{i=1}^{n} p(x_i \mid x_{<i})\] 其中: \(x_{<i} = [x_1, x_2, \dots, x_{i-1}]\) ,这意味着:只要我们能为每个维度 \(i\) 学好一个条件分布 \(p(x_i \mid...
Self-Supervised
2026-01-18
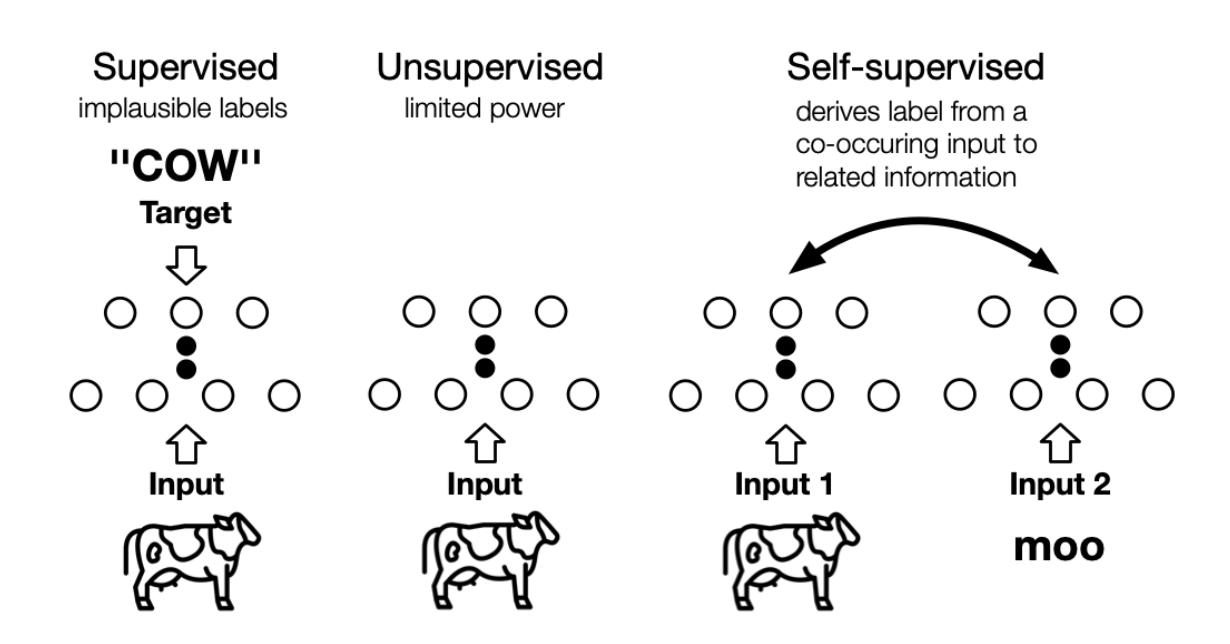
the machine predicts any parts of its input for any observed part 这是LeCun在AAAI 2020上对自监督学习的定义,再结合传统的自监督学习定义,可以总结如下两点特征: 通过“半自动”过程从数据本身获取“标签”; 从“其他部分”预测部分数据。 个人理解, 其实任意挖掘对象之间联系、探索不同对象共同本质的方法,都或多或少算是自监督学习的思想 。 自监督学习与无监督学习的区别主要在于,无监督学习专注于检测特定的数据模式,如聚类、社区发现或异常检测,而自监督学习的目标是恢复(recovering),仍处于监督学习的范式中。上图展示了三者之间的区别, 自监督中的“related information” 可以来自其他模态、输入的其他部分以及输入的不同形式。 Self-Supervised...
Deep Learning
2026-01-11
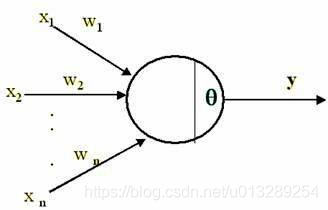
1.深度学习偏置的作用? 我们在学深度学习的时候,最早接触到的神经网络应该属于感知器(感知器本身就是一个很简单的神经网络,也许有人认为它不属于神经网络,当然认为它和神经网络长得像也行) 要想激活这个感知器,使得 y=1 ,就必须使 x_1w_1 + x_2w_2 +....+x_nw_n T ( T 为一个阈值),而 T 越大,想激活这个感知器的难度越大,人工选择一个阈值并不是一个好的方法,因为样本那么多,我不可能手动选择一个阈值,使得模型整体表现最佳,那么我们可以使得T变成可学习的,这样一来, T 会自动学习到一个数,使得模型的整体表现最佳。当把T移动到左边,它就成了偏置, x_1w_1 + x_2w_2 +....+x_nw_n T 0 xw +b 0 ,总之,偏置的大小控制着激活这个感...
Deep Learning
2026-01-11
如何计算RF 公式一:这个算法从top往下层层迭代直到追溯回input image,从而计算出RF。 [公式] 其中,RF是感受野。RF和RF有点像,N代表 neighbour,指的是第n层的 a feature在n1层的RF,记住N_RF只是一个中间变量,不要和RF混淆。 stride是步长,ksize是卷积核大小。
Computer Vision
2026-01-11

空洞卷积 Dilated/Atrous Convolution 或者是 Convolution with holes 从字面上就很好理解,是在标准的 convolution map 里注入空洞,以此来增加 reception field。相比原来的正常convolution,dilated convolution 多了一个 hyperparameter 称之为 dilation rate 指的是kernel的间隔数量(e.g. 正常的 convolution 是 dilatation rate 1)。 一个简单的例子 一维情况下空洞卷积的公式如下 [Formula] 不过光理解他的工作原理还是...
Computer Vision
2026-01-11
PA Pixel Accuracy(PA,像素精度):这是最简单的度量,为标记正确的像素占总像素的比例。 [公式] 图像中共有k+1(包含背景)类, p_{ii} 表示将第i类分成第 i 类的像素数量(正确分类的像素数量), p_{ij} 表示将第 i 类分成第 j 类的像素数量(所有像素数量) 因此该比值表示正确分类的像素数量占总像素数量的比例。 优点:简单 缺点:如果图像中大面积是背景,而目标较小,即使将整个图片预测为背景,也会有很高的PA得分,因此该指标不适用于评价以小目标为主的图像分割效果。 MPA Mean Pixel Accuracy(MPA,均像素精度):是PA的一种简单提升,计算每个类内被正确分类像素数的比例,之后求所有类的平均。 [公式] MIoU Mean Interse...
Deep Learning
2026-01-11

通过卷积和池化等技术可以将图像进行降维,因此,一些研究人员也想办法恢复原分辨率大小的图像,特别是在语义分割领域应用很成熟。 1、Upsampling(上采样)[没有学习过程] 在FCN、Unet等网络结构中,涉及到了上采样。上采样概念:上采样指的是任何可以让图像变成更高分辨率的技术。最简单的方式是重采样和插值:将输入图片进行rescale到一个想要的尺寸,而且计算每个点的像素点,使用如双线性插值等插值方法对其余点进行插值来完成上采样过程。 在PyTorch中,上采样的层被封装在torch.nn中的Vision Layers里面,一共有4种: PixelShuffle Upsample UpsamplingNearest2d UpsamplingBilinear2d 0)PixelShuffl...
Generative Model
2026-01-11

给定一个包含 n 维数据 x 的数据集 D , 简单起见,假设数据 [Math] . 由于真正对联合分布建模的时候, x,y 都是随机变量,故而只需讨论 p(X)=p(x_1,...,x_n) 即可,毕竟只需要令 x_n=y 即可。 给定一个具体的任务,如MNIST中的手写数字二值图分类,从Generative的角度进行Represent,并在Inference中Learning. 下面先介绍: 描述如何对这个MINST任务建模 p(X,Y) (Representation) 对MNIST任务建模 对于一张pixel为 [Math] 大小的图片,令 x_1 表示第一个pixel的随机变量, [Math] ,需明确: 任务目标:学习一个模型分布 [Math] ,使采样时 [Math] , x ...
Computer Vision
2026-01-11

Segment Anything Segment Anything(SA)项目:一个用于图像分割的新任务、新模型和新数据集 通过FM(基础模型)+prompt解决了CV中难度较大的分割任务,给计算机视觉实现基础模型+提示学习+指令学习提供了一种思路 关键:加大模型容量(构造海量的训练数据,或者构造合适的自监督任务来预训练) Segment Anything Task SAM的一部分灵感是来源于NLP中的基座模型(Foundation Model),Foundation Model是OpenAI提出的一个概念,它指的是在超大量数据集上预训练过的大模型(如GPT系列、BERT),这些模型具有非常强大的 zeroshot 和 fewshot能力,结合prompt engineering和fine ...
Computer Vision
2026-01-11
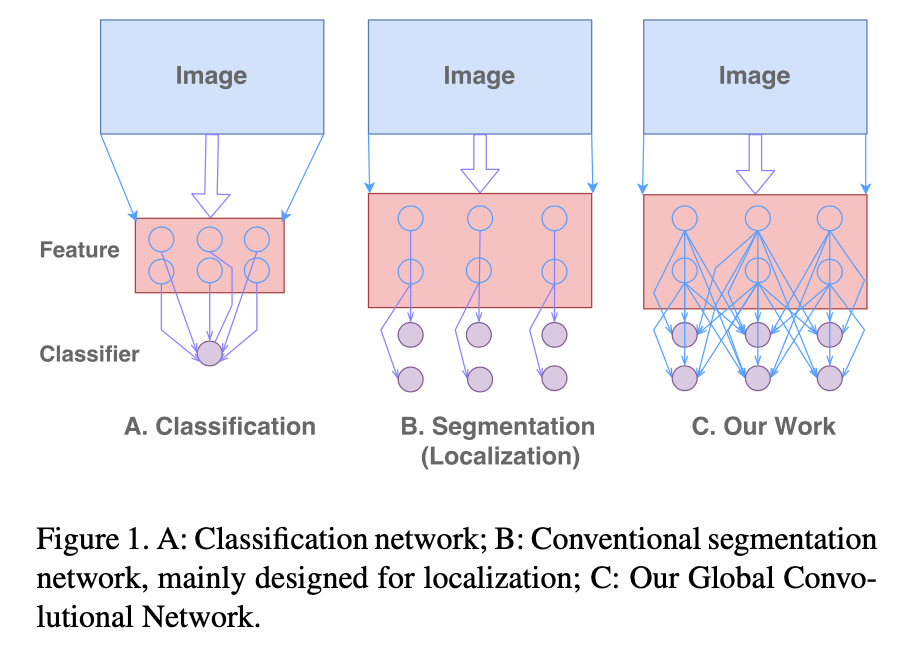
CVPR2017 算法 Global Convolutional Network(GCN),江湖人送外号“Large Kernel”。 Motivation GCN 主要将 Semantic Segmentation分解为:Classification 和 Localization两个问题。但是,这两个任务本质对特征的需求是矛盾的,Classification需要特征对多种Transformation具有不变性,而 Localization需要对 Transformation比较敏感。但是,普通的 Segmentation Model大多针对 Localization Issue设计,正如图(b)所示,而这不利于 Classification。 所以,为了兼顾这两个 Task,本文提出了两个...