129. 滑动窗口最大值 题目 给你一个整数数组 nums ,有一个大小为 k 的滑动窗口从数组的最左侧移动到数组的最右侧。你只可以看到在滑动窗口内的 k 个数字。滑动窗口每次只向右移动一位。 返回 滑动窗口中的最大值 。 示例 1: 输入:nums = [1,3,-1,-3,5,3,6,7], k = 3
输出:[3,3,5,5,6,7]
解释:
滑动窗口的位置 最大值
--------------- -----
[1 3 -1] -3 5 3 6 7 3
1 [3 -1 -3] 5 3 6 7 3
1 3 [-1 -3 5] 3 6 7 5
1 3 -1 [-3 5 3] 6 7 5
1 3 -1 -3 [5 3 6] 7 6
1 3 -1 -3 5 [3 6 7] 7 示例 2: 输入:nums = [1], k = 1
输出:[1] 提示: 1 <= nums.length...
Large Model
2026-01-20
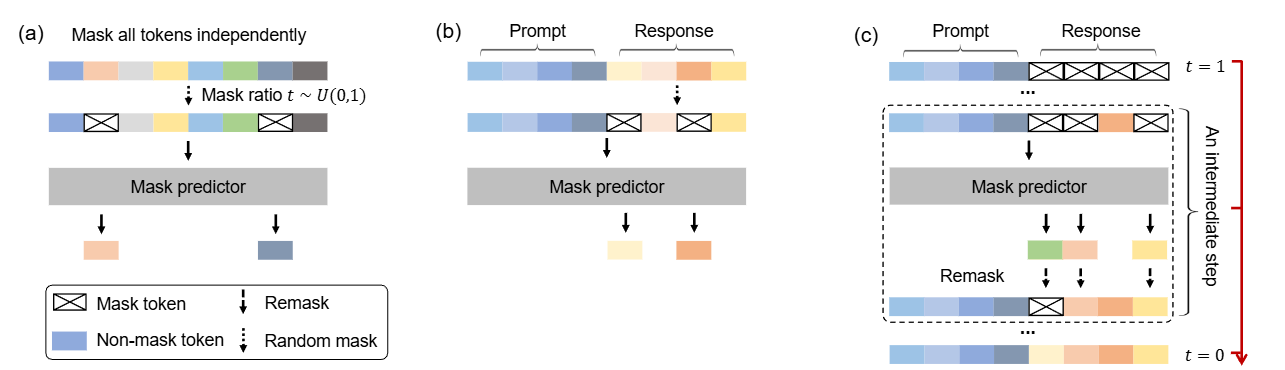
这是一篇尝试改变LLM「范式」的文章:当前主流的LLM架构都是「自回归」的,通俗地理解就是必须「从左到右依次生成」。这篇文章挑战了这一范式,探索扩散模型在 LLMs 上的可行性,通过 随机掩码 - 预测 的逆向思维,让模型学会「全局思考」。 论文: [2502.09992] Large Language Diffusion Models 背景 主流大语言模型架构:自回归模型 (Autoregressive LLMs) 过去几年, 自回归模型(Autoregressive Models, ARMs)一直是大语言模型(LLM)的主流架构。典型的自回归语言模型以Transformer解码器为基础,按照从左到右 的顺序依次预测下一个词元(token)。 形式化地,自回归模型将一个长度为 \(N\) 的文本序列 \(X=(x_1, x_2, ..., x_N)\) 的概率分解为各位置的条件概率连乘积: \[P_{\theta}(x_1, x_2, \dots, x_N) = \prod_{i=1}^{N} P_{\theta}(x_i \mid x_1, x_2, \dots,...
Large Model
2026-01-20
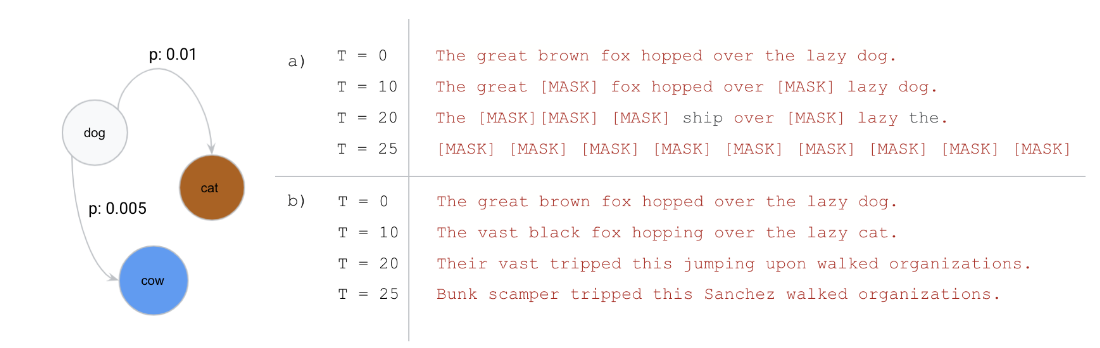
引言 Diffusion模型近年来在图像生成这一连续域任务中取得了显著成果,展现出强大的生成能力。然而,在文本生成这一离散域任务中整体效果仍不尽如人意,未能在该领域引起广泛关注。 去年,一篇研究离散扩散模型在文本生成的文章《Discrete Diffusion Modeling by Estimating the Ratios of the Data Distribution》获得ICML 2024的Best Paper,引发了学术界的广泛兴趣,也激发了新一轮的研究热潮。随后在2025年,越来越多高校和企业也开始积极探索基于Diffusion的文本生成方法。其中,近期备受关注的Block Diffusion也成功入选ICLR oral,进一步推动了该方向的发展。...
Generative Model
2026-01-19

💡 扩散模型:通过加噪的方式去学习原始数据的分布, 从学到的分布中去生成样本 DDPM 关键点: 1. 正向加噪是离散时间马尔可夫链:从 \(x_0\) 逐步加噪得到 \(x_1,x_2,...,x_T\) ;在合适的噪声调度与足够大的 \(T\) 下, \(x_T\) 近似服从 \( N(0,I) \) 的各向同性高斯。 2. 每一步噪声方差 \(β_t\) 满足 \(0<β_t<1\) ,通常随 \(t\) 增大;因此 \(q(x_t|x_{t-1}) \) 的均值缩放系数 \(\sqrt{1-β_t} \) 逐渐减小。 3. 训练通过最大化对数似然的变分下界(ELBO)来学习反向过程 \( p_θ(x_{t-1}|x_t)\) ,并将其参数化为高斯分布(神经网络预测均值/噪声或 score)。 4. 将目标写成 score/DSM 形式时,loss 的权重与对应噪声层的方差尺度(如 \(1-\bar{α}_t\) 或相关量)有关;采样通常是按学习到的反向转移逐步生成(祖先采样),与经典 Langevin MCMC 更新形式不同,但可在 SDE 视角下统一理解。...
Generative Model
2026-01-19
基于文章 《Elucidating the Design Space of Diffusion-Based Generative Models》 来统一扩散模型框架 通用扩散模型框架推导 加噪公式 Flow Matching的一步加噪公式 \[\mathbf{x}_t=(1-t)\mathbf{x}_0+t\varepsilon\] 写成概率分布形式: \[p(\mathbf{x}_t|\mathbf{x}_0)=\mathcal{N}(\mathbf{x}_t;(1-t)\mathbf{x}_0,t^2\mathbf{I})\] Score Matching的一步加噪公式 \[\mathbf{x}_t=\mathbf{x}_0+\sigma_t\varepsilon \] 写成概率分布形式: \[p(\mathbf{x}_t|\mathbf{x}_0)=\mathcal{N}(\mathbf{x}_t;\mathbf{x}_0,\sigma_t^2\mathbf{I})\] DDPM/DDIM的一步加噪公式...
Deep Learning
2026-01-11
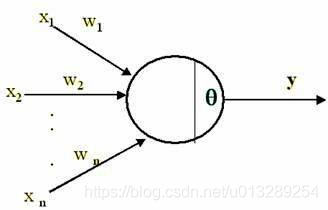
1.深度学习偏置的作用? 我们在学深度学习的时候,最早接触到的神经网络应该属于感知器(感知器本身就是一个很简单的神经网络,也许有人认为它不属于神经网络,当然认为它和神经网络长得像也行) 要想激活这个感知器,使得 y=1 ,就必须使 x_1w_1 + x_2w_2 +....+x_nw_n T ( T 为一个阈值),而 T 越大,想激活这个感知器的难度越大,人工选择一个阈值并不是一个好的方法,因为样本那么多,我不可能手动选择一个阈值,使得模型整体表现最佳,那么我们可以使得T变成可学习的,这样一来, T 会自动学习到一个数,使得模型的整体表现最佳。当把T移动到左边,它就成了偏置, x_1w_1 + x_2w_2 +....+x_nw_n T 0 xw +b 0 ,总之,偏置的大小控制着激活这个感...
Deep Learning
2026-01-11
如何计算RF 公式一:这个算法从top往下层层迭代直到追溯回input image,从而计算出RF。 [公式] 其中,RF是感受野。RF和RF有点像,N代表 neighbour,指的是第n层的 a feature在n1层的RF,记住N_RF只是一个中间变量,不要和RF混淆。 stride是步长,ksize是卷积核大小。
Generative Model
2026-01-11
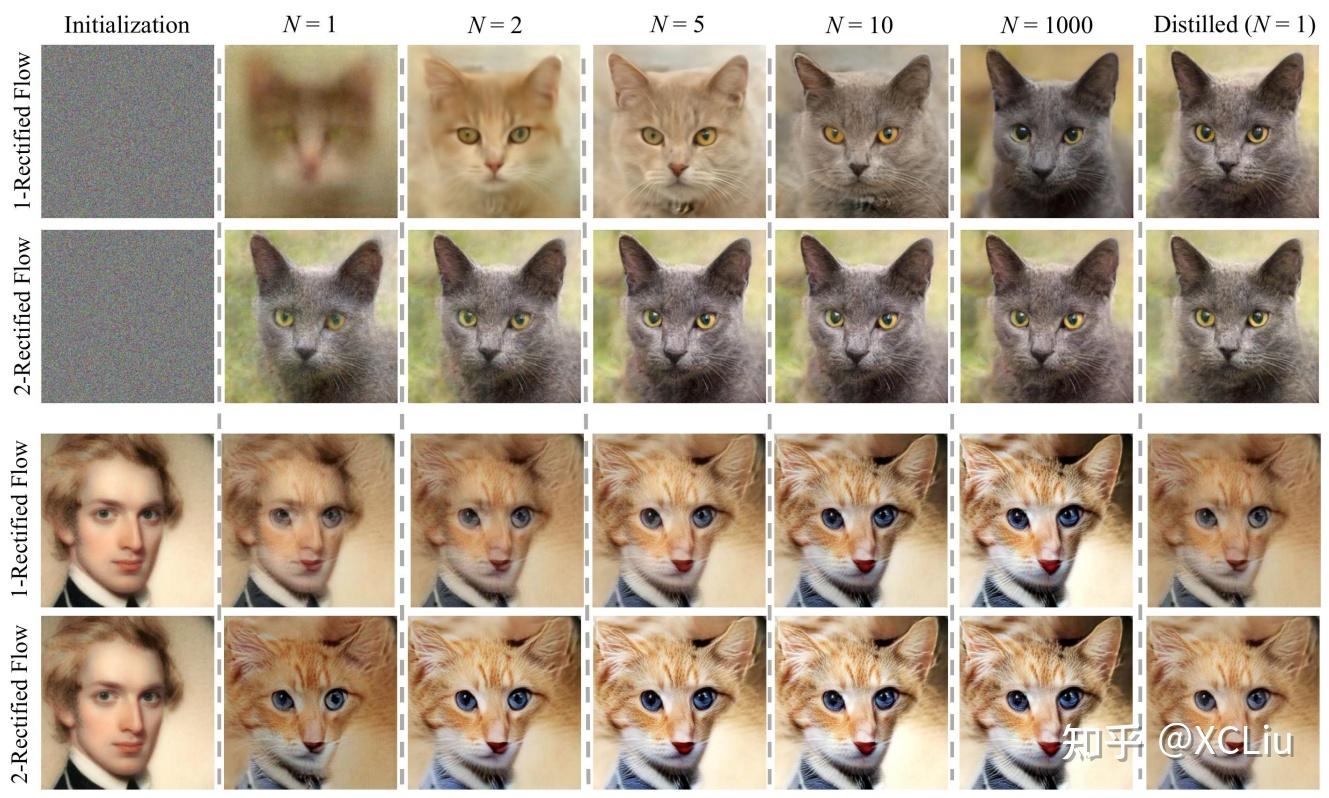
💡 原本随机采样的DDPM模型中,也隐含了一个确定性的采样过程DDIM,它的连续极限也是一个ODE。 细想上述过程,可以发现不管是“DDPM→DDIM”还是“SDE→ODE”,都是从随机采样模型过渡到确定性模型,而如果我们一开始的目标就是ODE,那么该过程未免显得有点“迂回”了。在本文中,笔者尝试给出ODE扩散模型的直接推导,并揭示了它与雅可比行列式、热传导方程等内容的联系。 Rectified Flow 理论推导 微分方程 像GAN这样的生成模型,它本质上是希望找到一个确定性变换,能将从简单分布(如标准正态分布)采样出来的随机变量,变换为特定数据分布的样本。flow模型也是生成模型之一,它的思路是反过来,先找到一个能将数据分布变换简单分布的可逆变换,再求解相应的逆变换来得到一个生成模型。 ...
3D Model
2026-01-11
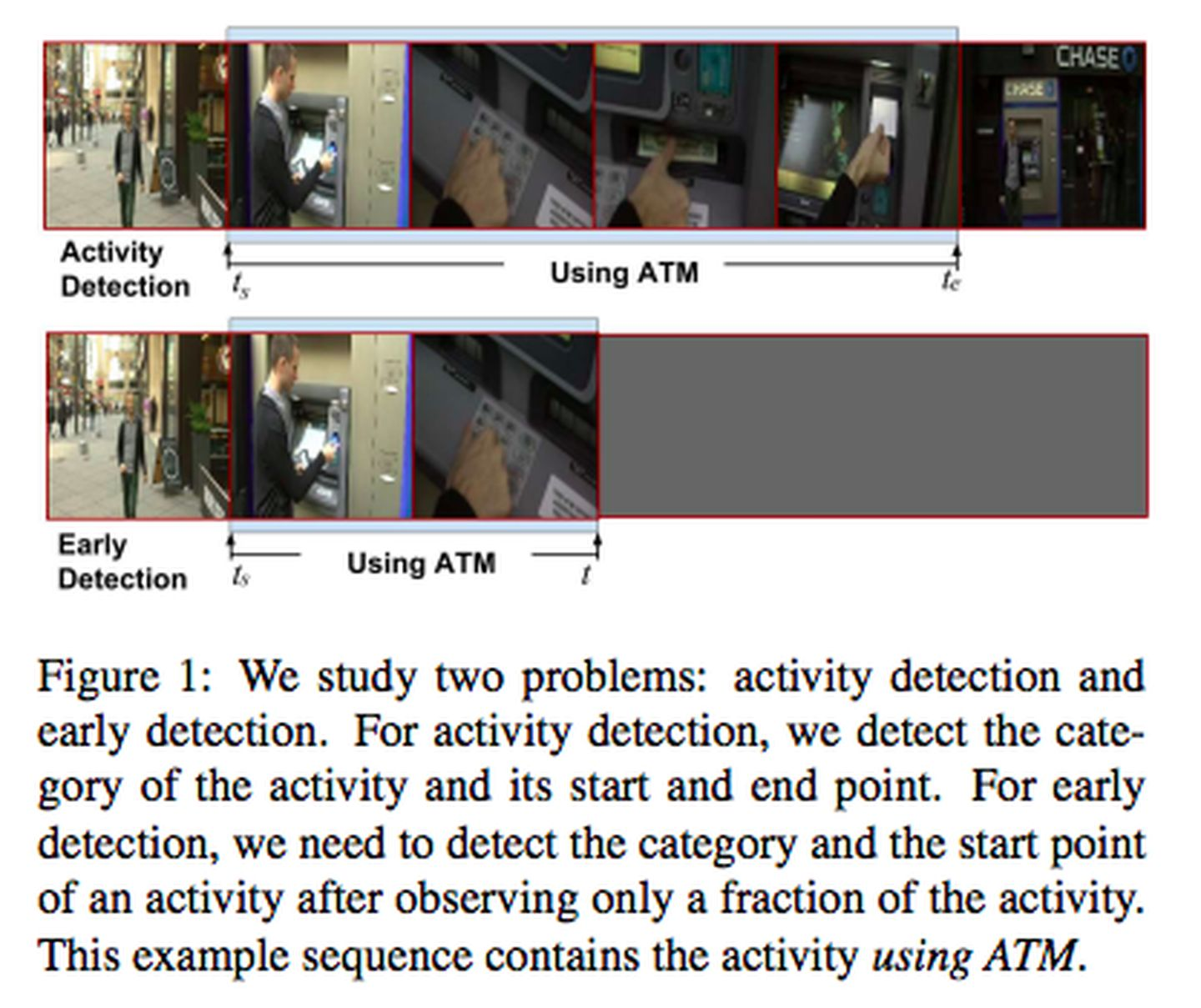
Temporal action detection可以分为两种setting, 一是offline的,在检测时视频是完整可得的,也就是可以利用完整的视频检测动作发生的时间区间(开始时间+结束时间)以及动作的类别; 二是 online的,即处理的是一个视频流,需要在线的检测(or 预测未来)发生的动作类别,但无法知道检测时间点之后的内容。online的问题设定更符合surveillance的需求,需要做实时的检测或者预警;offline的设定更符合视频搜索的需求,比如youtube可能用到的 highlight detection / preview generation。 问题演化 Early action detection Online action detection Online a...

简介 这篇文章的思路就是之前的工作都是在利用历史信息和当前时刻的信息,而这篇文章就是要预测未来的信息来结合历史信息做分类。整体框架采用的lstm。 方法 传统的RNN或者LSTM并不能接收未来的信息,所以作者设计了一个TRN Cell为一个循环单元,TRN Cell 的算法流程如下: 右侧的可以横过来看,输入是大lstm中的隐状态h(文中把大的lstm称作Encoder),以h为输入再经过小的lstm,将输出连接起来构成future信息。 再解释一下就是,endcoder中得到了时间t的信息,那以t的信息为输入,再经过序列lstm,每个输出就可以看作是对未来 t+1...t+l_d 的预测,这些预测再经过一个FC层和 t 时刻的结合起来,作用于encoder的下一时序。 从Loss的角度来说...
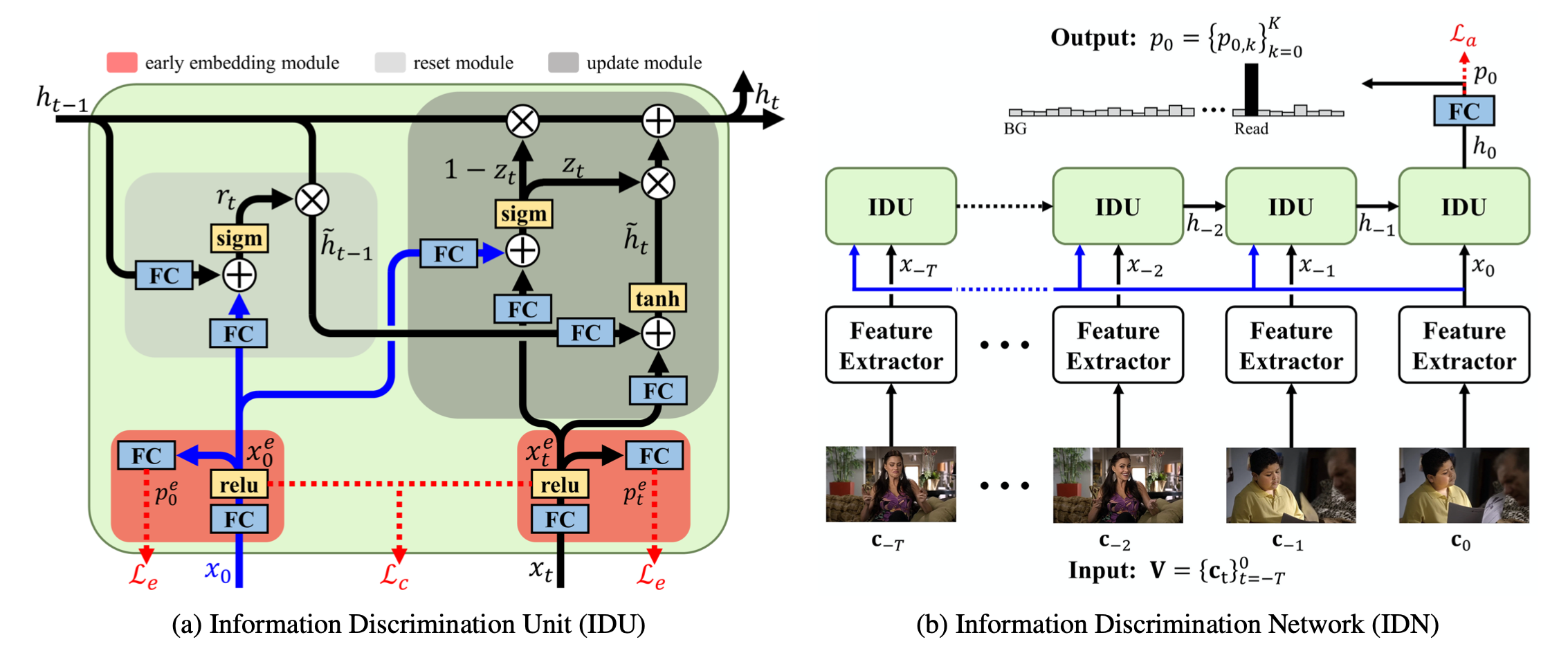
简介 这篇文章主要的动机是,之前的RNN,LSTM,GRU这样的循环结构中,循环单元累计历史输入,但忽视了其与当前动作的联系,所以不能得到一个有效的判别性的表示。 Specifically, the recurrent unit accumulates the input information without explicitly considering its relevance to the current action, and thus the learned representation would be less discriminative. 所以, 这篇文章就是在探索是否可以学习一个判别性较强的表示区分相关和不相关的信息以检测当前要动作。 how RNNs can lear...
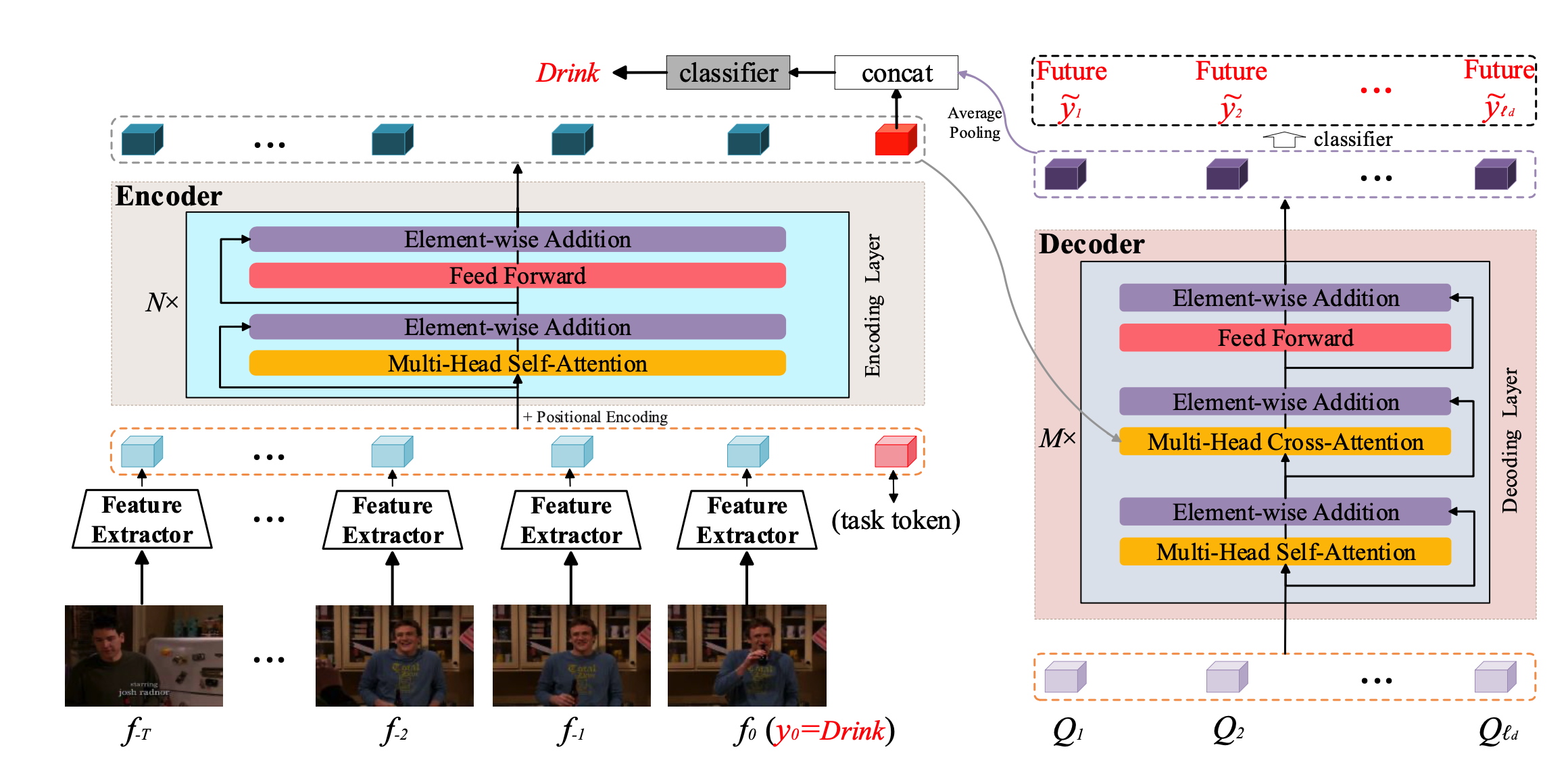
简介 之前的很多方法都是用RNN的结构去构建时序上的依赖关系,但是RNN的结构的缺点是不能并行操作,且存在梯度消失的现象。所以本文就是将之前的RNN的结构改为Transfomer的形式。延续了之前TRN的整个网络的框架,也是结合了对未来帧的预测与历史帧的表示相结合来对当前的动作进行预测。 方法 整个网络框架如上图所示, Encoder就是利用transfomer对longrange的历史和目前帧进行特征表示,其中要说明的一个点就是,这里的特征空间包含T个历史特征,当前窗口的特征以及一个task token,这个task token的作用可以从下图看出来 这幅图对比的是输入进classifier的特征与网络输入的特征的相似性,可以看出w/o task token 对应的是当前t=0时刻的特征,...