
11. 盛最多水的容器 题目 给定一个长度为 n 的整数数组 height 。有 n 条垂线,第 i 条线的两个端点是 (i, 0) 和 (i, height[i]) 。 找出其中的两条线,使得它们与 x 轴共同构成的容器可以容纳最多的水。 返回容器可以储存的最大水量。 说明: 你不能倾斜容器。 示例 1: 输入:[1,8,6,2,5,4,8,3,7]
输出:49
解释:图中垂直线代表输入数组 [1,8,6,2,5,4,8,3,7]。在此情况下,容器能够容纳水(表示为蓝色部分)的最大值为 49。 示例 2: 输入:height = [1,1]
输出:1 提示: n == height.length 2 <= n <= 10 5 0 <= height[i] <= 10 4 题解 在初始时,左右指针分别指向数组的左右两端,它们可以容纳的水量为 \(min(1,7)∗8=8\) 。 此时我们需要移动一个指针。移动哪一个呢?直觉告诉我们,应该移动对应数字较小的那个指针(即此时的左指针)。这是因为,由于容纳的水量是由 两个指针指向的数字中较小值∗指针之间的距离...
Generative Model
2026-01-18

简介 如果以概率的视角看待世界的生成模型。 在这样的世界观中,我们可以将任何类型的观察数据(例如 \(D\) )视为来自底层分布(例如 \( p_{data}\) )的有限样本集。 任何生成模型的目标都是在访问数据集 \(D\) 的情况下近似该数据分布。 如果我们能够学习到一个好的生成模型,我们可以将学习到的模型用于下游推理。 我们主要对数据分布的参数近似感兴趣,在一组有限的参数中,它总结了关于数据集 \(D\) 的所有信息。 与非参数模型相比,参数模型在处理大型数据集时能够更有效地扩展,但受限于可以表示的分布族。 在参数的设置中,我们可以将学习生成模型的任务视为在模型分布族中挑选参数,以最小化模型分布和数据分布之间的距离。 如上图,给定一个狗的图像数据集,我们的目标是学习模型族 \(M\) 中生成模型 θ 的参数,使得模型分布 \(p_θ\) 接近 \(p_{data}\) 上的数据分布。 在数学上,我们可以将我们的目标指定为以下优化问题: \[\mathop{min}\limits_{\theta\in M}d(p_\theta,p_{data})\] 其中, \(d()\)...
Generative Model
2026-01-18
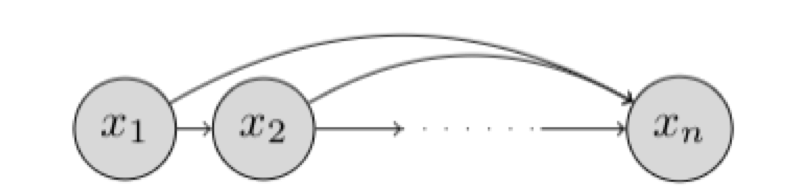
研究对象与基本设定 我们希望学习一个能够“生成数据”的概率模型。假设我们有一个数据集 \(D\) ,每个样本是 \(n\) 维二值向量: \(x \in \{0,1\}^n\) 我们的目标是用一个参数化分布 \(p_\theta(x)\) 去逼近真实数据分布 \(p_{\text{data}}(x)\) ,并最终能够: 密度估计 :给定 \(x\) 计算 \(p_\theta(x)\) 或 \(\log p_\theta(x)\) 采样生成 :从 \(p_\theta(x)\) 采样得到新的 \(x\) 表示:链式法则与自回归分解 链式法则分解联合分布 任意联合分布都可用概率链式法则分解为条件概率的乘积: \[p(x) = \prod_{i=1}^{n} p(x_i \mid x_1, x_2, \dots, x_{i-1}) = \prod_{i=1}^{n} p(x_i \mid x_{<i})\] 其中: \(x_{<i} = [x_1, x_2, \dots, x_{i-1}]\) ,这意味着:只要我们能为每个维度 \(i\) 学好一个条件分布 \(p(x_i \mid...
Self-Supervised
2026-01-18
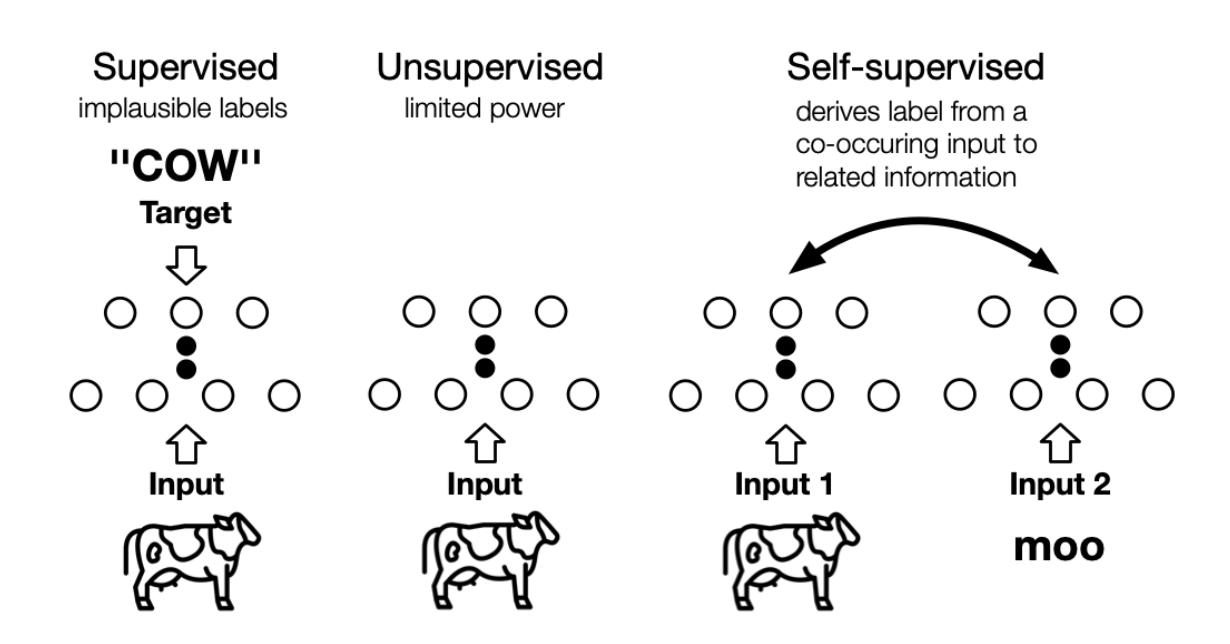
the machine predicts any parts of its input for any observed part 这是LeCun在AAAI 2020上对自监督学习的定义,再结合传统的自监督学习定义,可以总结如下两点特征: 通过“半自动”过程从数据本身获取“标签”; 从“其他部分”预测部分数据。 个人理解, 其实任意挖掘对象之间联系、探索不同对象共同本质的方法,都或多或少算是自监督学习的思想 。 自监督学习与无监督学习的区别主要在于,无监督学习专注于检测特定的数据模式,如聚类、社区发现或异常检测,而自监督学习的目标是恢复(recovering),仍处于监督学习的范式中。上图展示了三者之间的区别, 自监督中的“related information” 可以来自其他模态、输入的其他部分以及输入的不同形式。 Self-Supervised...
Reinforcement Learning
2026-01-11

引言与背景 蒙特卡洛方法是强化学习中的重要算法类别,它标志着从基于模型到无模型算法的转变。这类算法不依赖环境模型,而是通过与环境的直接交互获取经验数据来学习最优策略。 蒙特卡洛方法在强化学习算法谱系中处于"无模型"方法的起始位置,是从基于模型的方法(如值迭代和策略迭代)向无模型方法过渡的第一步。 无模型强化学习的核心理念可以简述为:如果没有模型,我们必须有数据;如果没有数据,我们必须有模型;如果两者都没有,我们就无法找到最优策略。在强化学习中,"数据"通常指智能体与环境交互的经验。 均值估计问题 在介绍蒙特卡洛强化学习算法之前,我们首先需要理解均值估计问题,这是理解从数据而非模型中学习的基础。 考虑一个可以取有限实数集合 X 中值的随机变量 X ,我们的任务是计算 X 的均值或期望值: E[...
Generative Model
2026-01-11

给定一个包含 n 维数据 x 的数据集 D , 简单起见,假设数据 [Math] . 由于真正对联合分布建模的时候, x,y 都是随机变量,故而只需讨论 p(X)=p(x_1,...,x_n) 即可,毕竟只需要令 x_n=y 即可。 给定一个具体的任务,如MNIST中的手写数字二值图分类,从Generative的角度进行Represent,并在Inference中Learning. 下面先介绍: 描述如何对这个MINST任务建模 p(X,Y) (Representation) 对MNIST任务建模 对于一张pixel为 [Math] 大小的图片,令 x_1 表示第一个pixel的随机变量, [Math] ,需明确: 任务目标:学习一个模型分布 [Math] ,使采样时 [Math] , x ...
NLP
2026-01-11

摘掉Softmax 制约Attention性能的关键因素,其实是定义里边的Softmax!事实上,简单地推导一下就可以得到这个结论。 [Math] 这一步我们得到一个 [Math] 的矩阵,就是这一步决定了Attention的复杂度是 [Math] ;如果没有Softmax,那么就是三个矩阵连乘 [Math] ,而矩阵乘法是满足结合率的,所以我们可以先算 [Math] ,得到一个 [Math] 的矩阵,然后再用 [Math] 左乘它,由于 [Math] ,所以这样算大致的复杂度只是 [Math] (就是 [Math] 左乘那一步占主导)。 也就是说,去掉Softmax的Attention的复杂度可以降到最理想的线性级别 [Math] !这显然就是我们的终极追求:Linear Attentio...
NLP
2026-01-11

概述 本文介绍一个比较有意思的高效Transformer工作——来自Google的《Transformer Quality in Linear Time》,经过细读之后,笔者认为论文里边真算得上是“惊喜满满”了~ 什么样的结果值得我们用“惊喜”来形容?有没有言过其实?我们不妨先来看看论文做到了什么: 1. 提出了一种新的Transformer变体,它依然具有二次的复杂度,但是相比标准的Transformer,它有着更快的速度、更低的显存占用以及更好的效果; 1. 提出一种新的线性化Transformer方案,它不但提升了原有线性Attention的效果,还保持了做Decoder的可能性,并且做Decoder时还能保持高效的训练并行性。 说实话,笔者觉得做到以上任意一点都是非常难得的,而这篇论...
NLP
2026-01-11

概述 SSM的概念由来已久,但这里我们特指深度学习中的SSM,一般认为其开篇之作是2021年的 S4,不算太老,而SSM最新最火的变体大概是Mamba。当然,当我们谈到SSM时,也可能泛指一切线性RNN模型,这样RWKV、RetNet还有此前LRU都可以归入此类。不少SSM变体致力于成为Transformer的竞争者,尽管笔者并不认为有完全替代的可能性,但SSM本身优雅的数学性质也值得学习一番。 尽管我们说SSM起源于S4,但在S4之前,SSM有一篇非常强大的奠基之作《HiPPO: Recurrent Memory with Optimal Polynomial Projections》(简称HiPPO),所以本文从HiPPO开始说起。 另外值得一提的是,SSM代表作HiPPO、S4、Mam...
Reinforcement Learning
2026-01-11
引言与背景 价值函数方法是强化学习中的核心技术,它解决了传统表格方法在处理大型状态或动作空间时的效率问题。本文探讨了从表格表示向函数表示的转变,这是强化学习算法发展的重要里程碑。 在强化学习的发展路径中,价值函数方法位于从基于模型到无模型、从表格表示到函数表示的演进过程中。它结合了时序差分学习的思想,并通过函数近似技术来处理复杂环境。 价值表示:从表格到函数 表格与函数表示的对比 传统的表格方法将状态值存储在一个表格中: 而函数近似方法则使用参数化函数来表示这些值,例如: [公式] 其中 [Math] 称作是状态 s 的特征向量, w 是参数向量。 两种不同的表现形式的区别主要体现在以下几个方面: 值的检索方式 值的更新方式 函数复杂度与近似能力 函数的复杂度决定了其近似的能力: 一阶线性函...
NLP
2026-01-11

概述 众所周知,尽管基于Attention机制的Transformer类模型有着良好的并行性能,但它的空间和时间复杂度都是 [Math] 级别的, n 是序列长度,所以当 n 比较大时Transformer模型的计算量难以承受。近来,也有不少工作致力于降低Transformer模型的计算量,比如模型剪枝、量化、蒸馏等精简技术,又或者修改Attention结构,使得其复杂度能降低到 [Math] 甚至 [Math] 。 改变这一复杂度的思路主要有两种: 一是走稀疏化的思路,比如OpenAI的Sparse Attention,通过“只保留小区域内的数值、强制让大部分注意力为零”的方式,来减少Attention的计算量。经过特殊设计之后,Attention矩阵的大部分元素都是0,因此理论上它也能节...
Reinforcement Learning
2026-01-11

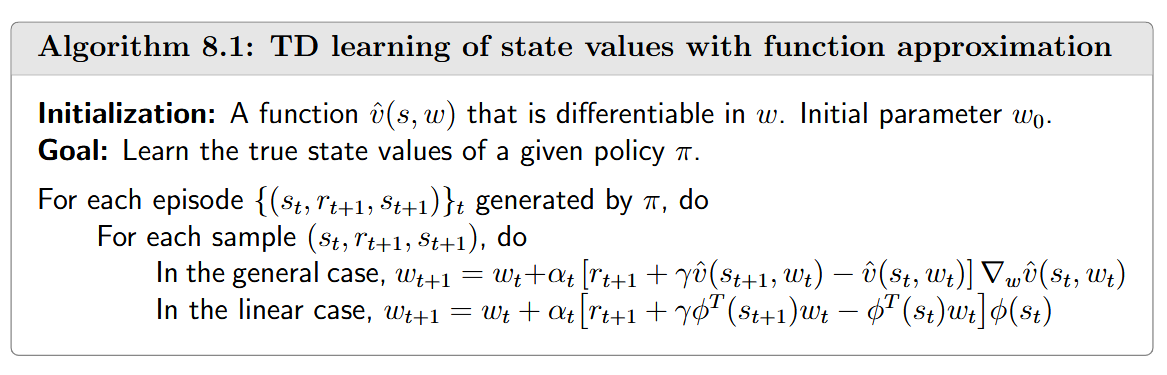
引言 时序差分(TemporalDifference,TD)方法是强化学习中的一类核心算法,它结合了动态规划与蒙特卡洛方法的优点。TD方法是无模型(modelfree)学习方法,不需要环境模型即可学习价值函数和最优策略。 TD方法的核心特点是通过比较不同时间步骤的估计值之间的差异来更新价值函数,这种差异被称为"时序差分误差"(TD error)。TD方法可以被视为解决贝尔曼方程或贝尔曼最优方程的特殊随机逼近算法。 基础TD算法:状态值函数学习 给定策略 [Math] ,基础TD算法用于估计状态值函数 [Math] 。假设我们有一些按照策略 [Math] 生成的经验样本 (s_0, r_1, s_1, ..., s_t, r_{t+1}, s_{t+1}, ...) ,TD算法的更新规则为: ...