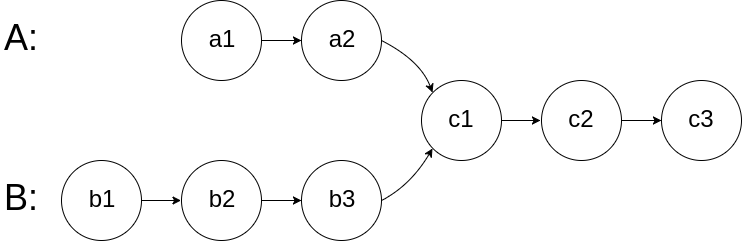
160. 相交链表 题目 给你两个单链表的头节点 headA 和 headB ,请你找出并返回两个单链表相交的起始节点。如果两个链表不存在相交节点,返回 null 。 图示两个链表在节点 c1 开始相交 : 题目数据 保证 整个链式结构中不存在环。 注意 ,函数返回结果后,链表必须 保持其原始结构 。 自定义评测: 评测系统 的输入如下(你设计的程序 不适用 此输入): intersectVal - 相交的起始节点的值。如果不存在相交节点,这一值为 0 listA - 第一个链表 listB - 第二个链表 skipA - 在 listA 中(从头节点开始)跳到交叉节点的节点数 skipB - 在 listB 中(从头节点开始)跳到交叉节点的节点数 评测系统将根据这些输入创建链式数据结构,并将两个头节点 headA 和 headB 传递给你的程序。如果程序能够正确返回相交节点,那么你的解决方案将被 视作正确答案 。 示例 1: 输入:intersectVal = 8, listA = [4,1,8,4,5], listB = [5,6,1,8,4,5], skipA = 2,...

48. 旋转图像 题目 给定一个 \(n × n\) 的二维矩阵 matrix 表示一个图像。请你将图像顺时针旋转 90 度。 你必须在 原地 旋转图像,这意味着你需要直接修改输入的二维矩阵。 请不要 使用另一个矩阵来旋转图像。 示例 1: 输入:matrix = [[1,2,3],[4,5,6],[7,8,9]]
输出:[[7,4,1],[8,5,2],[9,6,3]] 示例 2: 输入:matrix = [[5,1,9,11],[2,4,8,10],[13,3,6,7],[15,14,12,16]]
输出:[[15,13,2,5],[14,3,4,1],[12,6,8,9],[16,7,10,11]] 提示: n == matrix.length == matrix[i].length 1 <= n <= 20 -1000 <= matrix[i][j] <= 1000 题解 这是一个经典的矩阵操作问题。要在原地(In-place)将图像顺时针旋转 90 度,我们可以利用矩阵的几何性质。 最直观且易于实现的方法是将...

11. 盛最多水的容器 题目 给定一个长度为 n 的整数数组 height 。有 n 条垂线,第 i 条线的两个端点是 (i, 0) 和 (i, height[i]) 。 找出其中的两条线,使得它们与 x 轴共同构成的容器可以容纳最多的水。 返回容器可以储存的最大水量。 说明: 你不能倾斜容器。 示例 1: 输入:[1,8,6,2,5,4,8,3,7]
输出:49
解释:图中垂直线代表输入数组 [1,8,6,2,5,4,8,3,7]。在此情况下,容器能够容纳水(表示为蓝色部分)的最大值为 49。 示例 2: 输入:height = [1,1]
输出:1 提示: n == height.length 2 <= n <= 10 5 0 <= height[i] <= 10 4 题解 在初始时,左右指针分别指向数组的左右两端,它们可以容纳的水量为 \(min(1,7)∗8=8\) 。 此时我们需要移动一个指针。移动哪一个呢?直觉告诉我们,应该移动对应数字较小的那个指针(即此时的左指针)。这是因为,由于容纳的水量是由 两个指针指向的数字中较小值∗指针之间的距离...
Large Model
2026-01-26
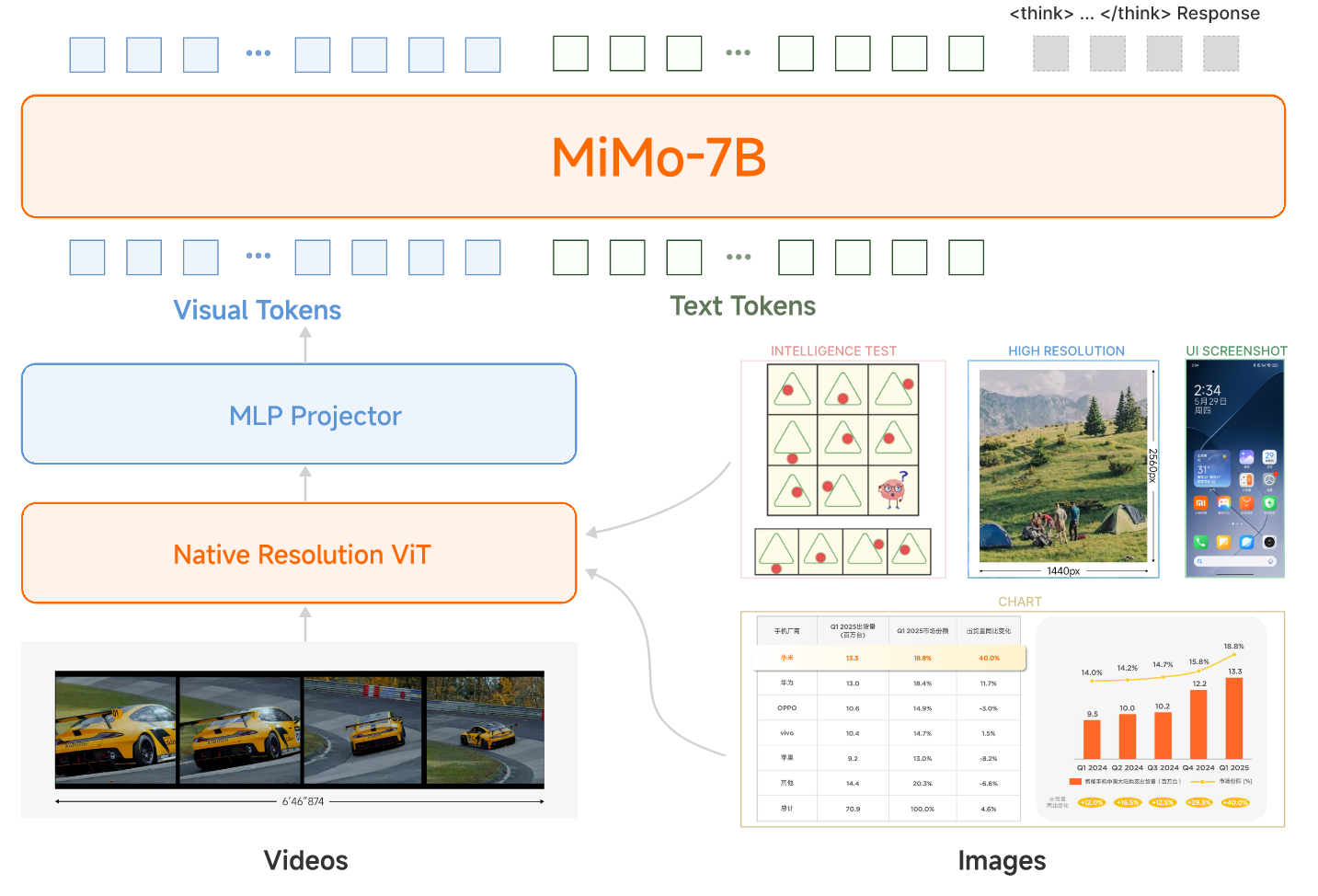
概述 小米团队近日发布了MIMO-VL-7B-SFT和MIMO-VL-7B-RL,这是两个强大的视觉语言模型,MIMO-VL-7B-RL在40个评估任务中的35个上优于QWEN2.5-VL-7B,对于GUI Grounding任务,它在OSWorld-G上设置了一个新标准,甚至超过了UI-TARS等专业模型。模型通过四个阶段的预训练(2.4T Token)与Mixed On-policy 强化(MORL)整合了多样化的奖励信号。 在文章中,作者提到了两个重要的发现: 从Pre-Traing 训练阶段中加入高质量且覆盖广的推理数据对于强化模型性能至关重要。 Mixed On-policy 强化学习进一步增强了模型的性能,同时实现了稳定的同时改进仍然在性能方面具有挑战性。 Pre-Training 模型结构 整个模型还是采用了VIT-MLP-LLM的结构,具体来说,视觉模型采用了Qwen2.5-VL中的视觉encoder,LLM采用了自家的语言模型MiMo-7B-Base。 整个Pretraining采用了四个阶段的训练,每个阶段采用的数据,模型训练参数和模型参数如下面两表所示...
Large Model
2026-01-26
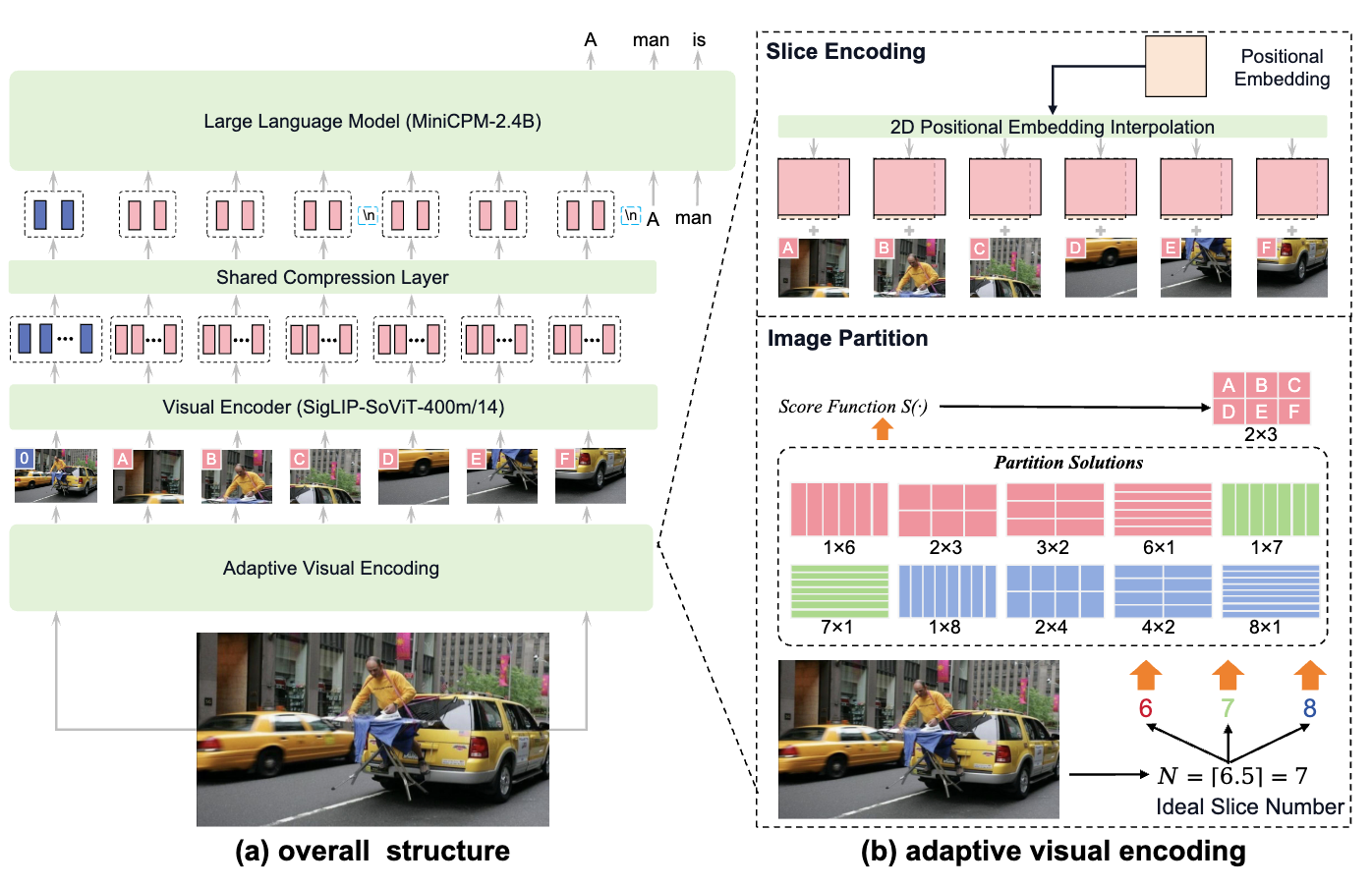
MiniCPM-V系列是面壁智能推出的小参数量的开源多模态大模型,没有超过9B的版本。主打小而强。 MiniCPM-Llama3-V 2.5 这版有论文了,详细写。应该也是2.6的基础。 这一版在 OpenCompass 评估中优于强大的 GPT-4V-1106、Gemini Pro 和 Claude 3。 能力 支持最高1.8M像素的高分辨率图像输入(例如1344*1344),支持任意长宽比图像 强大的OCR,OCRBench 上优于 GPT-4V、Gemini Pro 和 Qwen-VL-Max,支持table-to-markdown 可信,基于RLAIF-V技术做了对齐,减少幻觉,更符合人类喜好 多语言,基于VisCPM技术,支持30多种语言 系统地集成了一套端侧部署优化技术 模型架构 基本架构 三部分:visual encoder, 压缩层, LLM visual encoder:SigLIP SoViT-400m/14 压缩层:单层交叉注意力 LLM:每一代都不同 Adaptive Visual Encoding...
Large Model
2026-01-26
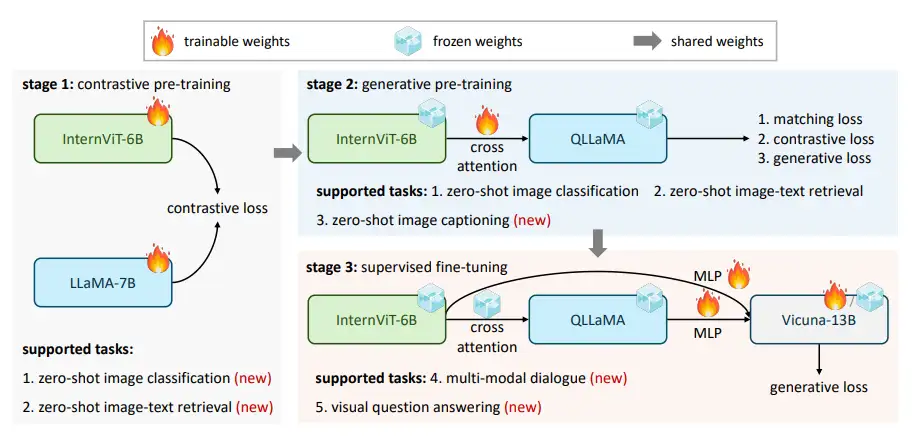
InternVL Blog: https://internvl.github.io/blog/ Github: https://github.com/OpenGVLab/InternVL InternVL 1.0 对齐策略 语言模型和视觉模型各自发展,各有突破,但如何让语言模型会看图,或者让视觉模型会说话?为了将视觉模型与语言模型进行连接,对齐如同“胶水”,将两种模型链接在一起,如使用QFormer或线性投影这样的轻量级“胶水”层,来形成视觉-语言模型,如InstructBLIP和LLaVA,但均存在局限性。 现有对齐策略的局限性 参数规模的不一致: LLM的参数规模已经达到1000亿,而广泛使用的VLLM的视觉编码器仍在10亿参数左右。这种差距可能导致LLM的能力无法被充分利用。 特征表示的不一致: 在纯视觉数据上训练的视觉模型或与BERT系列对齐的模型往往与LLM存在表示上的不一致。 连接效率低下: “胶水”层通常是轻量的、随机初始化的,可能无法捕捉到多模态理解和生成所需的丰富的跨模态交互和依赖关系。 InternVL引入全新的对齐策略...
Large Model
2026-01-24
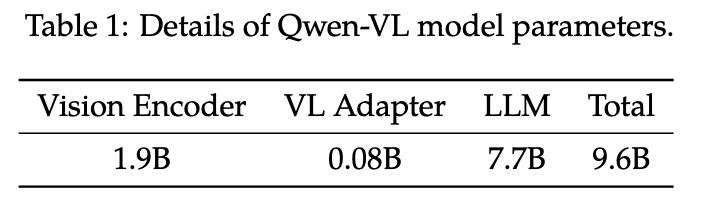
Qwen-VL 模型框架 Qwen-VL的整体网络架构由三个组件组成: LLM:使用 Qwen-7B 的预训练权重进行初始化。 视觉编码器:Qwen-VL 的可视化编码器使用ViT 架构,使用 Openclip 的 ViT-bigG 的预训练权重进行初始化。在训练和推理过程中,输入图像的大小都会调整为特定分辨率。视觉编码器通过以 14 步幅将图像分割成块来处理图像,生成一组图像特征。 位置感知视觉语言适配器:为了缓解长图像特征序列带来的效率问题,Qwen-VL 引入了一种视觉语言适配器来压缩图像特征。类似QFormer,该适配器包括一个随机初始化的单层交叉注意力模块。使用一组可训练向量(嵌入)作为query,并将视觉编码器中的图像特征作为交叉注意力作的key。该机制将视觉特征序列压缩到固定长度 256。 图像输入 图像不会直接以像素形式喂给语言模型(LLM)。 典型流程是: Visual Encoder :把图片编码成一串视觉特征(embedding/feature sequence)。 Adapter :把视觉特征映射到语言模型可接入的表征空间/维度。 最终得到:...
Large Model
2026-01-23
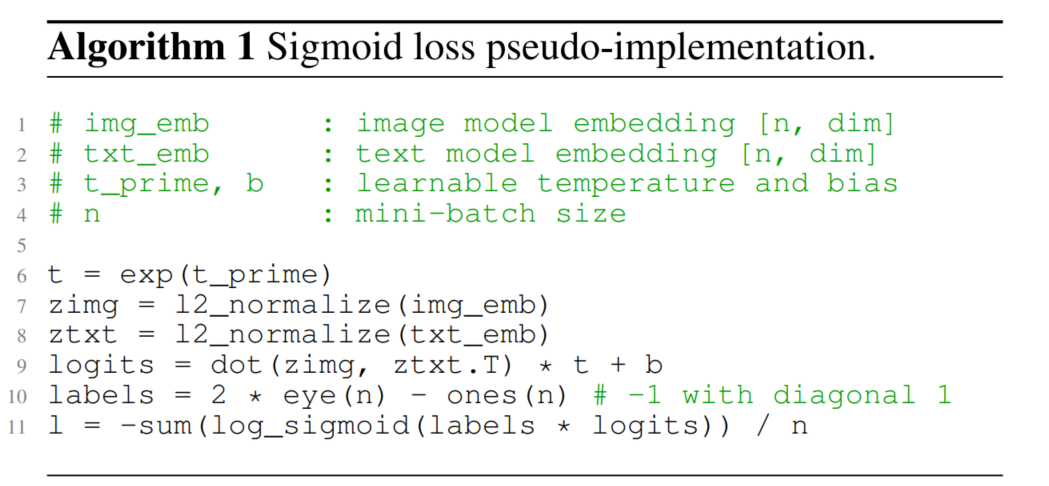
SigLIP 概述 CLIP自提出以来在zero-shot分类、跨模态搜索、多模态对齐等多个领域得到广泛应用。得益于其令人惊叹的能力,激起了研究者广泛的关注和优化。 目前对CLIP的优化主要可以分为两大类: 其一是如何降低CLIP的训练成本; 其二是如何提升CLIP的performance。 对于第一类优化任务的常见思路有3种。 优化训练架构,如 LiT 通过freezen image encoder,单独训练text encoder来进行text 和image的对齐来加速训练; 减少训练token,如 FLIP 通过引入视觉mask,通过只计算非mask区域的视觉表征来实现加速(MAE中的思路) 优化目标函数,如 CatLIP 将caption转为class label,用分类任务来代替对比学习任务来实现加速。 对于第二类提升CLIP的performance最常用和有效的手段就是数据治理,即构建高质量、大规模、高多样性的图文数据,典型的工作如:DFN。 SigLIP这篇paper 提出用sigmoid...
Large Model
2026-01-22
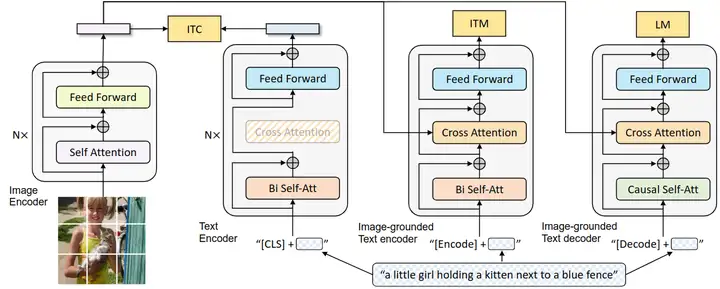
BLIP 论文名称 :BLIP: Bootstrapping Language-Image Pre-training for Unified Vision-Language Understanding and Generation (ICML 2022) 论文地址: https://arxiv.org/pdf/2201.12086.pdf 代码地址: https://github.com/salesforce/BLIP 官方解读博客: https://blog.salesforceairesearch.com/blip-bootstrapping-language-image-pretraining/ 背景和动机 视觉语言训练 (Vision-Language Pre-training, VLP) 最近在各种多模态下游任务上取得了巨大的成功。然而,现有方法有两个主要限制: 模型层面: 大多数现有的预训练模型仅在基于理解的任务或者基于生成的任务方面表现出色,很少有可以兼顾的模型。比如,基于编码器的模型,像 CLIP,ALBEF 不能直接转移到文本生成任务...
Large Model
2026-01-22

CLIP算法原理 CLIP 不预先定义图像和文本标签类别,直接利用从互联网爬取的 400 million 个image-text pair 进行图文匹配任务的训练,并将其成功迁移应用于30个现存的计算机视觉分类。简单的说,CLIP 无需利用 ImageNet 的数据和标签进行训练,就可以达到 ResNet50 在 ImageNet数据集上有监督训练的结果,所以叫做 Zero-shot。 CLIP(contrastive language-image pre-training)主要的贡献就是 利用无监督的文本信息,作为监督信号来学习视觉特征 。 CLIP 作者先是回顾了并总结了和上述相关的两条表征学习路线: 构建image和text的联系,比如利用已有的image-text pair数据集,从text中学习image的表征; 获取更多的数据(不要求高质量,也不要求full...
数组&链表&字符串 双指针 滑动窗口 哈希表 哈希表 栈&队列 单调队列 树与堆 图 数学 Math
Large Model
2026-01-15
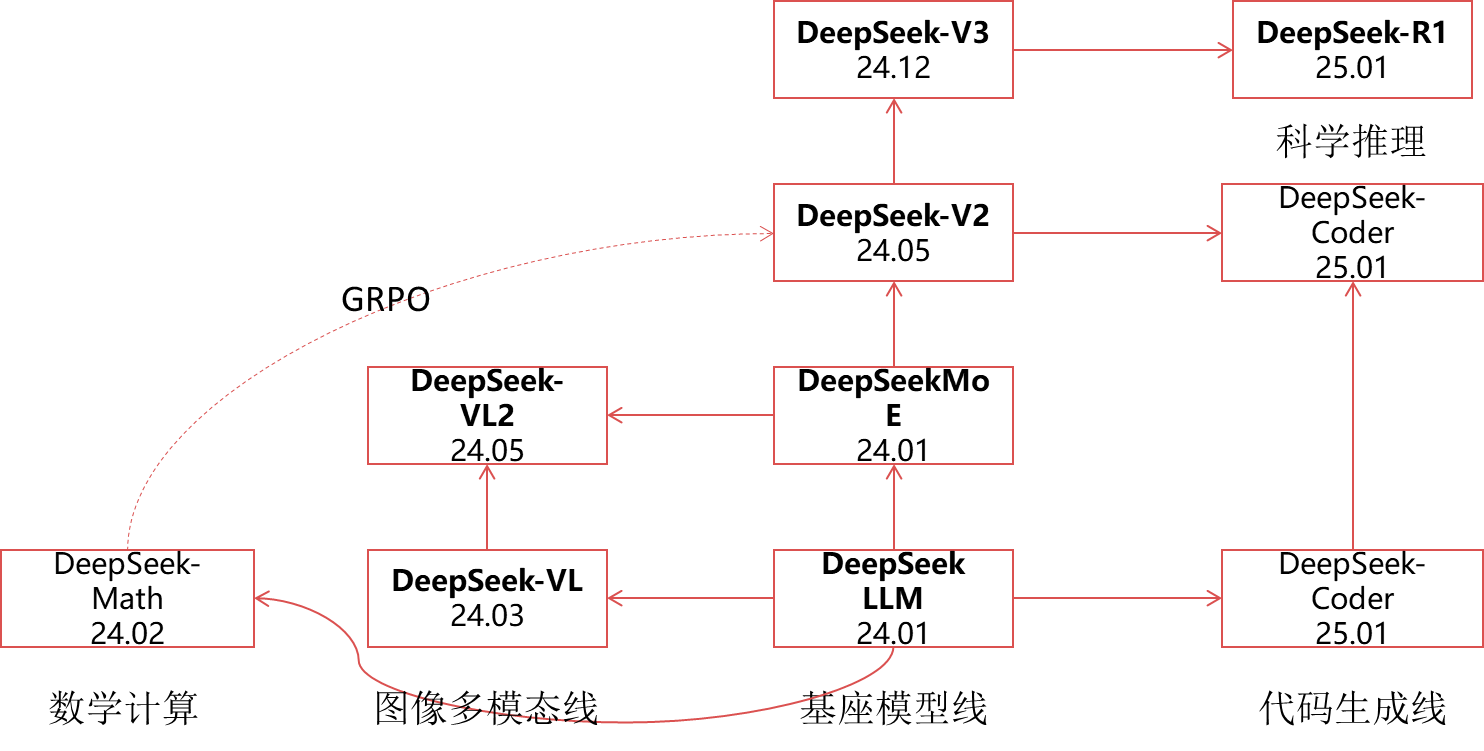
🔖 https://www.deepseek.com/ DeepSeek LLM 代码地址: https://github.com/deepseek-ai/DeepSeek-LLM 背景 量化巨头幻方探索AGI(通用人工智能)新组织“深度求索”在成立半年后,发布的第一代大模型,免费商用,完全开源。作为一家隐形的AI巨头,幻方拥有1万枚英伟达A100芯片,有手撸的HAI-LLM训练框架HAI-LLM:高效且轻量的大模型训练工具。 概述 DeepSeek LLMs,这是一系列在2万亿标记的英语和中文大型数据集上从头开始训练的开源模型 在本文中,深入解释了超参数选择、Scaling Laws以及做过的各种微调尝试。校准了先前工作中的Scaling Laws,并提出了新的最优模型/数据扩展-缩放分配策略。此外,还提出了一种方法,使用给定的计算预算来预测近似的batch-size和learning-rate。进一步得出结论,Scaling Laws与数据质量有关,这可能是不同工作中不同扩展行为的原因。在Scaling Laws的指导下,使用最佳超参数进行预训练,并进行全面评估。...