
11. 盛最多水的容器 题目 给定一个长度为 n 的整数数组 height 。有 n 条垂线,第 i 条线的两个端点是 (i, 0) 和 (i, height[i]) 。 找出其中的两条线,使得它们与 x 轴共同构成的容器可以容纳最多的水。 返回容器可以储存的最大水量。 说明: 你不能倾斜容器。 示例 1: 输入:[1,8,6,2,5,4,8,3,7]
输出:49
解释:图中垂直线代表输入数组 [1,8,6,2,5,4,8,3,7]。在此情况下,容器能够容纳水(表示为蓝色部分)的最大值为 49。 示例 2: 输入:height = [1,1]
输出:1 提示: n == height.length 2 <= n <= 10 5 0 <= height[i] <= 10 4 题解 在初始时,左右指针分别指向数组的左右两端,它们可以容纳的水量为 \(min(1,7)∗8=8\) 。 此时我们需要移动一个指针。移动哪一个呢?直觉告诉我们,应该移动对应数字较小的那个指针(即此时的左指针)。这是因为,由于容纳的水量是由 两个指针指向的数字中较小值∗指针之间的距离...
NLP
2026-01-24

旋转式位置编码(ROPE) 原始的Sinusoidal位置编码总的感觉是一种“想要成为相对位置编码的绝对位置编码”。一般来说,绝对位置编码具有实现简单、计算速度快等优点,而相对位置编码则直接地体现了相对位置信号,跟我们的直观理解吻合,实际性能往往也更好。由此可见,如果可以通过绝对位置编码的方式实现相对位置编码,那么就是“集各家之所长”、“鱼与熊掌兼得”了。Sinusoidal位置编码隐约做到了这一点,但并不够好。 本文将会介绍我们自研的Rotary Transformer(RoFormer)模型,它的主要改动是应用了笔者构思的“旋转式位置编码(Rotary Position Embedding,RoPE)”,这是一种配合Attention机制能达到“绝对位置编码的方式实现相对位置编码”的设计。而也正因为这种设计,它还是目前唯一一种可用于线性Attention的相对位置编码。 RoFormer:https://github.com/ZhuiyiTechnology/roformer 基本思路 这里简要介绍过RoPE: Transformer位置编码...
NLP
2026-01-24
不同于RNN、CNN等模型,对于Transformer模型来说,位置编码的加入是必不可少的,因为纯粹的Attention模块是无法捕捉输入顺序的,即无法区分不同位置的Token。为此我们大体有两个选择: 想办法将位置信息融入到输入中,这构成了绝对位置编码的一般做法; 想办法微调一下Attention结构,使得它有能力分辨不同位置的Token,这构成了相对位置编码的一般做法。 虽然说起来主要就是绝对位置编码和相对位置编码两大类,但每一类其实又能衍生出各种各样的变种,为此研究人员可算是煞费苦心、绞尽脑汁了,此外还有一些不按套路出牌的位置编码。本文就让我们来欣赏一下研究人员为了更好地表达位置信息所构建出来的“八仙过海,各显神通”般的编码方案。 绝对位置编码 形式上来看,绝对位置编码是相对简单的一种方案,但即便如此,也不妨碍各路研究人员的奇思妙想,也有不少的变种。一般来说,绝对位置编码会加到输入中:在输入的第 𝑘 个向量 \(𝑥_𝑘\) 中加入位置向量 \(𝑝_𝑘\) 变为 \(\boldsymbol{x}_k + \boldsymbol{p}_k\) ,其中 \(...
Large Model
2026-01-23
总览 由于是“图文多模态”,还是要从“图”和“文”的表征方法讲起,然后讲清楚图文表征的融合方法。这里只讲两件事情: 视觉表征 :分为两个部分问题,一是如何合理建模视觉输入特征,二是如何通过预训练手段进行充分学习表征,这两点是基于视觉完成具体算法任务的基础; 视觉与自然语言的对齐(Visul Language Alignment)或融合 :目的是将视觉和自然语言建模到同一表征空间并进行融合,实现自然语言和视觉语义的互通,这点同样离不开预训练这一过程。模态对齐是处理多模态问题的基础,也是现在流行的多模态大模型技术前提。 对于视觉表征,从发展上可以分为卷积神经网络(CNN)和Vision Transformer(VIT)两大脉络,二者分别都有各自的表征、预训练以及多模态对齐的发展过程。而对于VIT线,另有多模态大模型如火如荼的发展,可谓日新月异。 CNN:视觉理解的一代先驱 点击展开 卷积视觉表征模型和预训练...
Self-Supervised
2026-01-22
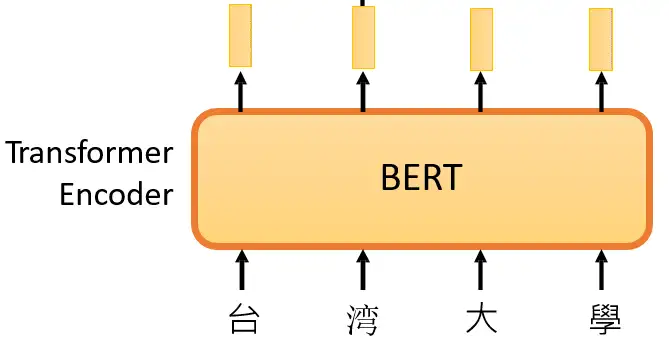
BERT 方法回顾 在 大规模预训练模型BERT 里面我们介绍了 BERT 的自监督预训练的方法,BERT 可以做的事情也就是Transformer 的 Encoder 可以做的事情,就是输入一排向量,输出另外一排向量,输入和输出的维度是一致的。那么不仅仅是一句话可以看做是一个sequence,一段语音也可以看做是一个sequence,甚至一个image也可以看做是一个sequence。所以BERT其实不仅可以用在NLP上,还可以用在CV里面。所以BERT其实输入的是一段文字,如下图所示。 BERT的架构就是Transformer 的 Encoder 接下来要做的事情是把这段输入文字里面的一部分随机盖住。随机盖住有 2 种,一种是直接用一个Mask 把要盖住的token (对中文来说就是一个字)给Mask掉,具体是换成一个 特殊的字符 。另一种做法是把这个token替换成一个随机的token。 把这段输入文字里面的一部分随机盖住 具体BERT详情可以参考: 大规模预训练模型BERT BERT 可以直接用在视觉任务上吗? 上面的 BERT 都是在 NLP 任务上使用,因为 NLP...
Deep Learning
2026-01-22

文章从连续情形出发开始介绍重参数,主要的例子是正态分布的重参数;然后引入离散分布的重参数,这就涉及到了Gumbel Softmax,包括Gumbel Softmax的一些证明和讨论;最后再讲讲重参数背后的一些故事,这主要跟梯度估计有关。 基本概念 重参数(Reparameterization) 实际上是处理如下期望形式的目标函数的一种技巧: \[L_{\theta}=\mathbb{E}_{z\sim p_{\theta}(z)}[f(z)]\tag{1}\] 这样的目标在VAE中会出现,在文本GAN也会出现,在强化学习中也会出现( \(f(z)\) 对应于奖励函数),所以深究下去,我们会经常碰到这样的目标函数。取决于 \(z\) 的连续性,它对应不同的形式: \[\int p_{\theta}(z) f(z)dz\,\,\,\text{(连续情形)}\qquad\qquad \sum_{z} p_{\theta}(z) f(z)\,\,\,\text{(离散情形)}\tag{2}\] 当然,离散情况下我们更喜欢将记号 \(z\) 换成 \(y\) 或者 \(c\) 。 为了最小化...
NLP
2026-01-22
Self-Supervised Learning ,又称为自监督学习,我们知道一般机器学习分为有监督学习,无监督学习和强化学习。 而 Self-Supervised Learning 是无监督学习里面的一种,主要是希望能够学习到一种 通用的特征表达 用于 下游任务 (Downstream Tasks) 。 其主要的方式就是通过自己监督自己。作为代表作的 kaiming 的 MoCo 引发一波热议, Yann Lecun也在 AAAI 上讲 Self-Supervised Learning 是未来的大势所趋。所以在这个系列中,我会系统地解读 Self-Supervised Learning 的经典工作。 本文主要介绍 Self-Supervised Learning 在 NLP领域 的经典工作:BERT模型的原理及其变体。 本文来自台湾大学李宏毅老师PPT: https://speech.ee.ntu.edu.tw/~hylee/ml/ml2021-course-data/bert_v8.pdf 芝麻街 在介绍 Self-Supervised Learning...
Computer Vision
2026-01-21
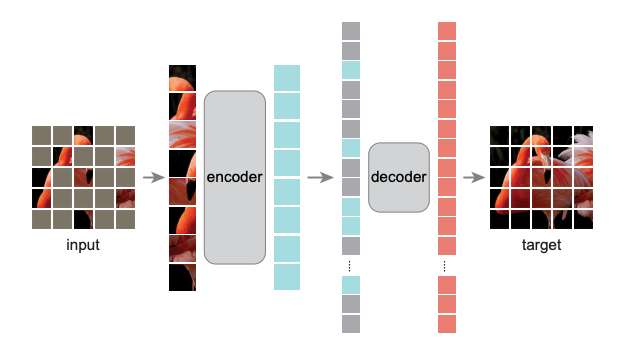
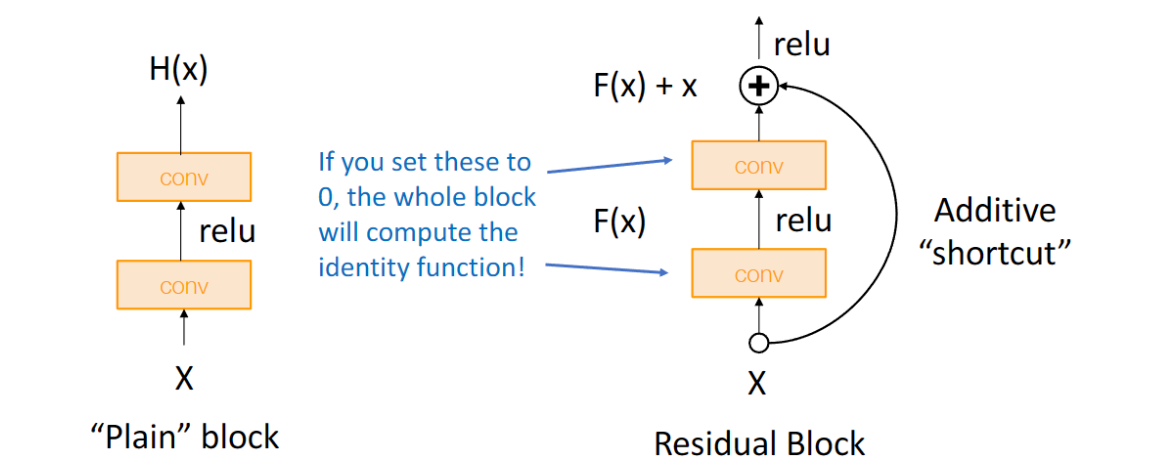
导言 自监督学习(Self-Supervised Learning)能利用大量无标注的数据进行表征学习,然后在特定下游任务上对参数进行微调。通过这样的方式,能够在较少有标注数据上取得优于有监督学习方法的精度。近年来,自监督学习受到了越来越多的关注,如Yann Lecun也在 AAAI 上讲 Self-Supervised Learning 是未来的大势所趋。在CV领域涌现了如SwAV、MOCO、DINO、MoBY等一系列工作。MAE是kaiming继MOCO之后在自监督学习领域的又一力作。首先,本文会对MAE进行解读,然后基于EasyCV库的精度复现过程及其中遇到的一些问题作出解答。 概述 MAE的做法很简单:随机mask掉图片中的一些patch,然后通过模型去重建这些丢失的区域。包括两个核心的设计:1.非对称编码-解码结构 2.用较高的掩码率(75%)。通过这两个设计MAE在预训练过程中可以取得3倍以上的训练速度和更高的精度,如ViT-Huge能够通过ImageNet-1K数据上取得87.8%的准确率。 模型拆解...
Computer Vision
2026-01-21

概述 在计算机视觉领域(CV),对视觉特征的理解CNN是长期处于主导地位的。而在NLP领域,Transformer框架的巨大成功,也激发了不少研究者探索将Transformer用于计算机视觉任务。ViT(Vision Transformer)的出现标志着在CV领域Transformer架构迈出了重要的一步。尤其在当前结合LLM的多模态探索上(MM-LLM),都是以LLM大语言模型为骨干架构的模型,多种模态的信息需要先做token化处理,再输入到LLM模型。ViT天然具有序列化特征的建模能力,自然在MM-LLM探索中大放异彩~ ViT在多模态模型中的角色类似于自然语言建模中的Tokenizer组件,对图像进行视觉特征编码,产出图像的序列特征。只不过ViT的编码过程本身也是采用了Transformer的模型结构。 本文主要结合几篇paper和源码讲讲ViT和针对ViT的一些优化方法~ ViT(Vision Transformer)...
Computer Vision
2026-01-21
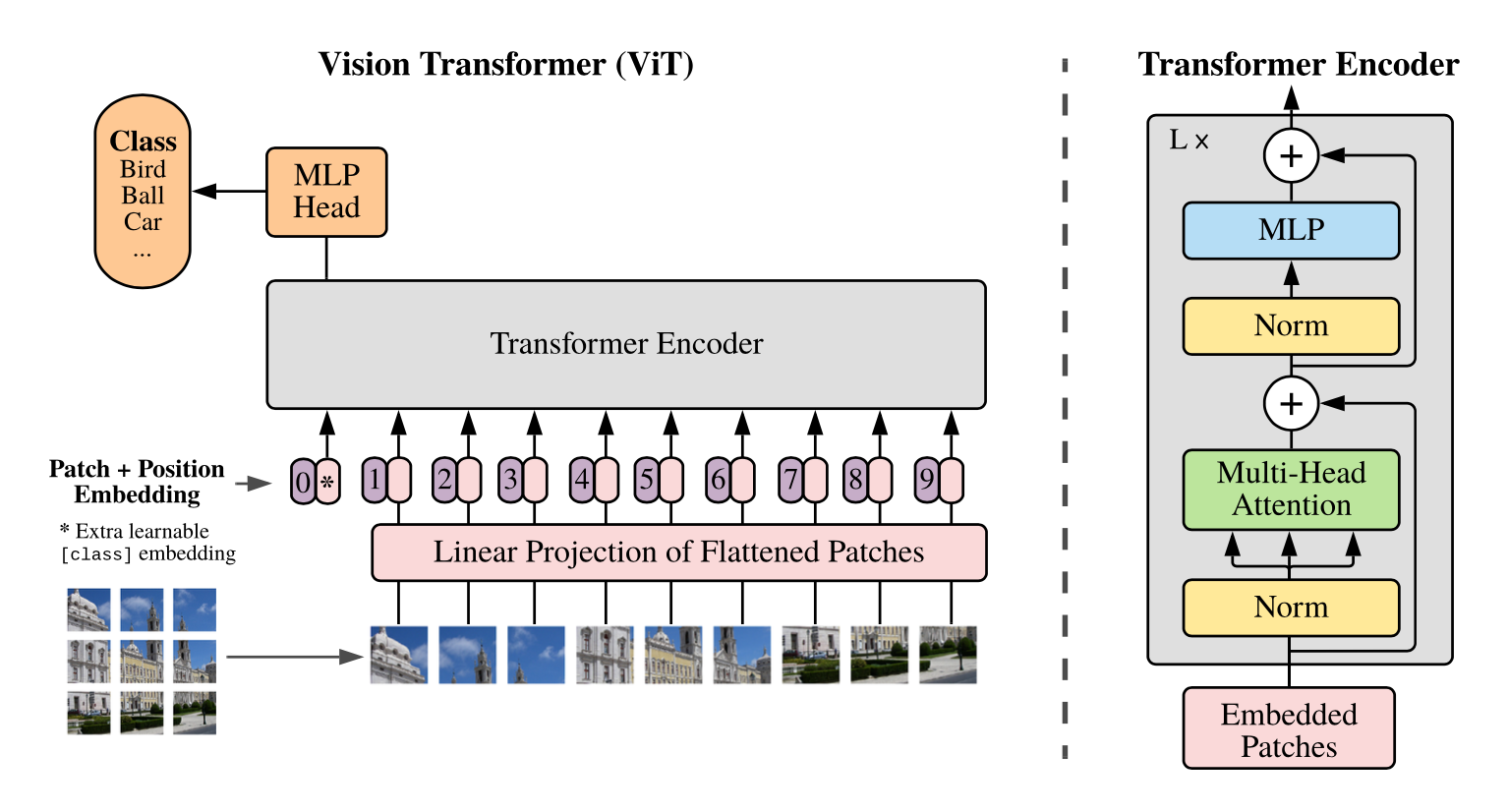
ViT(vision transformer)是Google在2020年提出的直接将transformer应用在图像分类的模型,后面很多的工作都是基于ViT进行改进的。ViT的思路很简单:直接把图像分成固定大小的patchs,然后通过线性变换得到patch embedding,这就类比NLP的words和word embedding,由于transformer的输入就是a sequence of token embeddings,所以将图像的patch embeddings送入transformer后就能够进行特征提取从而分类了。ViT模型原理如下图所示,其实ViT模型只是用了transformer的Encoder来提取特征(原始的transformer还有decoder部分,用于实现sequence to sequence,比如机器翻译)。下面将分别对各个部分做详细的介绍。 Patch Embedding 对于ViT来说,首先要将原始的2-D图像转换成一系列1-D的patch embeddings,这就好似NLP中的word embedding。输入的2-D图像记为 \(x\in...
Generative Model
2026-01-18

简介 如果以概率的视角看待世界的生成模型。 在这样的世界观中,我们可以将任何类型的观察数据(例如 \(D\) )视为来自底层分布(例如 \( p_{data}\) )的有限样本集。 任何生成模型的目标都是在访问数据集 \(D\) 的情况下近似该数据分布。 如果我们能够学习到一个好的生成模型,我们可以将学习到的模型用于下游推理。 我们主要对数据分布的参数近似感兴趣,在一组有限的参数中,它总结了关于数据集 \(D\) 的所有信息。 与非参数模型相比,参数模型在处理大型数据集时能够更有效地扩展,但受限于可以表示的分布族。 在参数的设置中,我们可以将学习生成模型的任务视为在模型分布族中挑选参数,以最小化模型分布和数据分布之间的距离。 如上图,给定一个狗的图像数据集,我们的目标是学习模型族 \(M\) 中生成模型 θ 的参数,使得模型分布 \(p_θ\) 接近 \(p_{data}\) 上的数据分布。 在数学上,我们可以将我们的目标指定为以下优化问题: \[\mathop{min}\limits_{\theta\in M}d(p_\theta,p_{data})\] 其中, \(d()\)...
Generative Model
2026-01-18

2022年中旬,以扩散模型为核心的图像生成模型将AI绘画带入了大众的视野。实际上,在更早的一年之前,就有了一个能根据文字生成高清图片的模型——VQGAN。VQGAN不仅本身具有强大的图像生成能力,更是传承了前作VQVAE把图像压缩成离散编码的思想,推广了「先压缩,再生成」的两阶段图像生成思路,启发了无数后续工作。 VQGAN 核心思想 VQGAN的论文名为 Taming Transformers for High-Resolution Image Synthesis,直译过来是「驯服Transformer模型以实现高清图像合成」。可以看出,该方法是在用Transformer生成图像。可是,为什么这个模型叫做VQGAN,是一个GAN呢?这是因为,VQGAN使用了两阶段的图像生成方法: 训练时,先训练一个图像压缩模型(包括编码器和解码器两个子模型),再训练一个生成压缩图像的模型。 生成时, 先用第二个模型生成出一个压缩图像,再用第一个模型复原成真实图像 。 其中,第一个图像压缩模型叫做VQGAN,第二个压缩图像生成模型是一个基于Transformer的模型。...