
11. 盛最多水的容器 题目 给定一个长度为 n 的整数数组 height 。有 n 条垂线,第 i 条线的两个端点是 (i, 0) 和 (i, height[i]) 。 找出其中的两条线,使得它们与 x 轴共同构成的容器可以容纳最多的水。 返回容器可以储存的最大水量。 说明: 你不能倾斜容器。 示例 1: 输入:[1,8,6,2,5,4,8,3,7]
输出:49
解释:图中垂直线代表输入数组 [1,8,6,2,5,4,8,3,7]。在此情况下,容器能够容纳水(表示为蓝色部分)的最大值为 49。 示例 2: 输入:height = [1,1]
输出:1 提示: n == height.length 2 <= n <= 10 5 0 <= height[i] <= 10 4 题解 在初始时,左右指针分别指向数组的左右两端,它们可以容纳的水量为 \(min(1,7)∗8=8\) 。 此时我们需要移动一个指针。移动哪一个呢?直觉告诉我们,应该移动对应数字较小的那个指针(即此时的左指针)。这是因为,由于容纳的水量是由 两个指针指向的数字中较小值∗指针之间的距离...
NLP
2026-01-24

旋转式位置编码(ROPE) 原始的Sinusoidal位置编码总的感觉是一种“想要成为相对位置编码的绝对位置编码”。一般来说,绝对位置编码具有实现简单、计算速度快等优点,而相对位置编码则直接地体现了相对位置信号,跟我们的直观理解吻合,实际性能往往也更好。由此可见,如果可以通过绝对位置编码的方式实现相对位置编码,那么就是“集各家之所长”、“鱼与熊掌兼得”了。Sinusoidal位置编码隐约做到了这一点,但并不够好。 本文将会介绍我们自研的Rotary Transformer(RoFormer)模型,它的主要改动是应用了笔者构思的“旋转式位置编码(Rotary Position Embedding,RoPE)”,这是一种配合Attention机制能达到“绝对位置编码的方式实现相对位置编码”的设计。而也正因为这种设计,它还是目前唯一一种可用于线性Attention的相对位置编码。 RoFormer:https://github.com/ZhuiyiTechnology/roformer 基本思路 这里简要介绍过RoPE: Transformer位置编码...
NLP
2026-01-24
不同于RNN、CNN等模型,对于Transformer模型来说,位置编码的加入是必不可少的,因为纯粹的Attention模块是无法捕捉输入顺序的,即无法区分不同位置的Token。为此我们大体有两个选择: 想办法将位置信息融入到输入中,这构成了绝对位置编码的一般做法; 想办法微调一下Attention结构,使得它有能力分辨不同位置的Token,这构成了相对位置编码的一般做法。 虽然说起来主要就是绝对位置编码和相对位置编码两大类,但每一类其实又能衍生出各种各样的变种,为此研究人员可算是煞费苦心、绞尽脑汁了,此外还有一些不按套路出牌的位置编码。本文就让我们来欣赏一下研究人员为了更好地表达位置信息所构建出来的“八仙过海,各显神通”般的编码方案。 绝对位置编码 形式上来看,绝对位置编码是相对简单的一种方案,但即便如此,也不妨碍各路研究人员的奇思妙想,也有不少的变种。一般来说,绝对位置编码会加到输入中:在输入的第 𝑘 个向量 \(𝑥_𝑘\) 中加入位置向量 \(𝑝_𝑘\) 变为 \(\boldsymbol{x}_k + \boldsymbol{p}_k\) ,其中 \(...
Computer Vision
2026-01-11
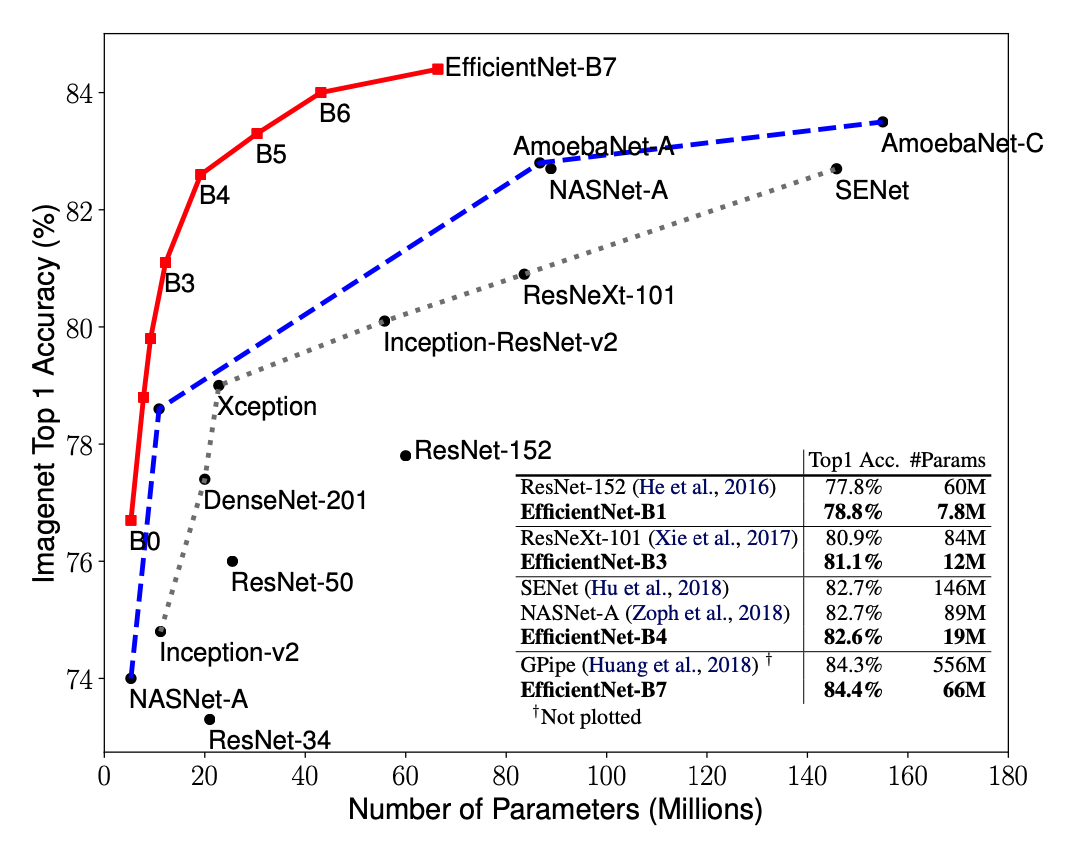
简介 EfficientNet源自Google Brain的论文EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks. 从标题也可以看出,这篇论文最主要的创新点是Model Scaling. 论文提出了compound scaling,混合缩放,把网络缩放的三种方式:深度、宽度、分辨率,组合起来按照一定规则缩放,从而提高网络的效果。EfficientNet在网络变大时效果提升明显,把精度上限进一步提升,成为了当前最强网络。EfficientNetB7在ImageNet上获得了最先进的 84.4%的top1精度 和 97.1%的top5精度,比之前最好的卷积网络(GPipe, Top1: 84.3%, ...
Machine Learning
2026-01-11
随机森林 (Random Forests) 是一种利用CART决策树作为基学习器的 Bagging 集成学习算法。随机森林模型的构建过程如下: 数据采样 作为一种 Bagging 集成算法,随机森林同样采用有放回的采样,对于总体训练集 T ,抽样一个子集 T_{sub} 作为训练样本集。除此之外,假设训练集的特征个数为 d ,每次仅选择 k(k<d) 个构建决策树。因此,随机森林除了能够做到样本扰动外,还添加了特征扰动,对于特征的选择个数,推荐值为 k=log_2d 。 树的构建 每次根据采样得到的数据和特征构建一棵决策树。在构建决策树的过程中,会让决策树生长完全而不进行剪枝。构建出的若干棵决策树则组成了最终的随机森林。 随机森林在众多分类算法中表现十分出众,其主要的优点包括: 1. 由于...
Machine Learning
2026-01-11
AdaBoost基本思路 分类问题 Adaboost 是 Boosting 算法中有代表性的一个。原始的 Adaboost 算法用于解决二分类问题,因此对于一个训练集 [公式] 其中 [Math] ,,首先初始化训练集的权重 [公式] 根据每一轮训练集的权重 D_m ,对训练集数据进行抽样得到 T_m ,再根据 T_m 训练得到每一轮的基学习器 h_m 。通过计算可以得出基学习器 h_m 的误差为 e_m [公式] 根据基学习器的误差计算得出该基学习器在最终学习器中的权重系数 [公式] 为什么这样计算弱学习器权重系数?从上式可以看出,如果分类误差率 𝑒_𝑘 越大,则对应的弱分类器权重系数 [Math] 越小。也就是说,误差率小的弱分类器权重系数越大。具体为什么采用这个权重系数公式,见AdaB...
Machine Learning
2026-01-11

GBDT (Gradient Boosting Decision Tree) 是另一种基于 Boosting 思想的集成算法,除此之外 GBDT 还有很多其他的叫法,例如:GBM (Gradient Boosting Machine),GBRT (Gradient Boosting Regression Tree),MART (Multiple Additive Regression Tree) 等等。GBDT 算法由 3 个主要概念构成:Gradient Boosting (GB),Regression Decision Tree (DT 或 RT) 和 Shrinkage。 0. Decision Tree:CART回归树 首先,GBDT使用的决策树是CART回归树,无论是处理回归问题还...
Machine Learning
2026-01-11

1. 从GBDT到XGBoost 作为GBDT的高效实现,XGBoost是一个上限特别高的算法,因此在算法竞赛中比较受欢迎。简单来说,对比原算法GBDT,XGBoost主要从下面三个方面做了优化: 一是算法本身的优化:在算法的弱学习器模型选择上,对比GBDT只支持决策树,还可以选择很多其他的弱学习器。在算法的损失函数上,除了本身的损失,还加上了正则化部分。在算法的优化方式上,GBDT的损失函数只对误差部分做负梯度(一阶泰勒)展开,而XGBoost损失函数对误差部分做二阶泰勒展开,更加准确。算法本身的优化是我们后面讨论的重点。 二是算法运行效率的优化:对每个弱学习器,比如决策树建立的过程做并行选择,找到合适的子树分裂特征和特征值。在并行选择之前,先对所有的特征的值进行排序分组,方便前面说的并行...
Machine Learning
2026-01-11

这篇博客介绍一下集成学习的几类:Bagging,Boosting以及Stacking。 传统机器学习算法 (例如:决策树,人工神经网络,支持向量机,朴素贝叶斯等) 的目标都是寻找一个最优分类器尽可能的将训练数据分开。集成学习 (Ensemble Learning) 算法的基本思想就是将多个分类器组合,从而实现一个预测效果更好的集成分类器。集成算法可以说从一方面验证了中国的一句老话:三个臭皮匠,赛过诸葛亮。 Thomas G. Dietterich 指出了集成算法在统计,计算和表示上的有效原因: 统计上的原因 一个学习算法可以理解为在一个假设空间 H 中选找到一个最好的假设。但是,当训练样本的数据量小到不够用来精确的学习到目标假设时,学习算法可以找到很多满足训练样本的分类器。所以,学习算法选择...
Computer Vision
2026-01-11

💡 轻量级网络系列 Introduction Inception 在最初的版本 Inception/GoogleNet,其核心思想是利用多尺寸卷积核去观察输入数据。举个栗子,我们看某个景象由于远近不同,同一个物体的大小也会有所不同,那么不同尺度的卷积核观察的特征就会有这样的效果。于是就有了如下的网络结构图: 于是我们的网络就变胖了,通过增加网络的宽度,提高了对于不同尺度的适应程度。但这样的话,计算量有点大了。 Pointwise Conv 为了减少在上面结构的参数量并降低计算量,于是在 Inception V1 的基础版本上加上了 1x1 卷积核,这就形成了 Inception V1 的最终网络结构,如下图。 这个 1x1 卷积就是 Pointwise Convolution,简称 PW。利...
Computer Vision
2026-01-11

网络整体介绍 ThunderNet的整体架构如下图所示。 ThunderNet使用320×320像素作为网络的输入分辨率。整体的网络结构分为两部分:Backbone部分和Detection部分。网络的骨干部分为SNet,SNet是基于ShuffleNetV2进行修改得到的。 网络的检测部分,利用了压缩的RPN网络,修改自LightHead RCNN网络用以提高效率。 并提出Context Enhancement Module整合局部和全局特征增强网络特征表达能力。 并提出Spatial Attention Module空间注意模块,引入来自RPN的前后景信息用以优化特征分布。 backbone 部分 1.输入分辨率 为了加快推理(前向操作)速度,作者使用320320大小的输入图像。需要注意的...