杂七杂八
2026-04-02
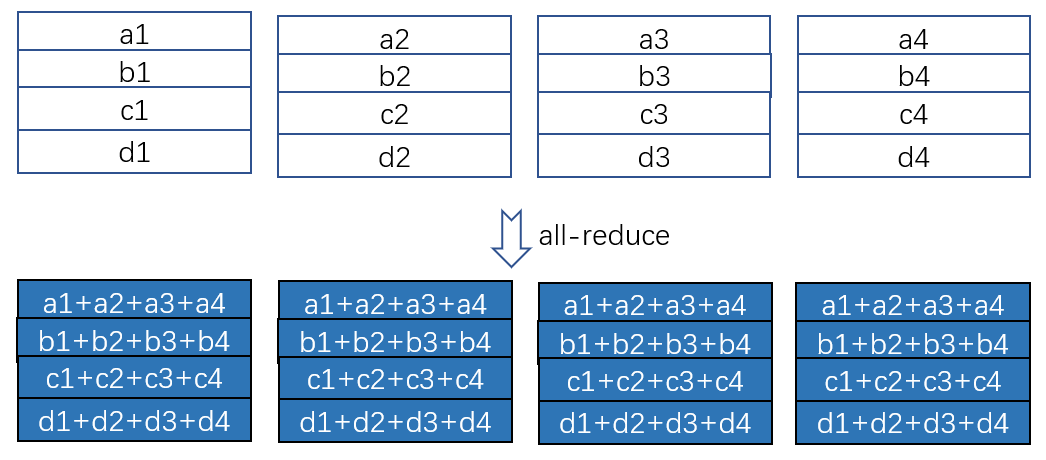
分布式深度学习里的通信严重依赖于规则的集群通信,诸如 all-reduce, reduce-scatter, all-gather 等,因此,实现高度优化的集群通信,以及根据任务特点和通信拓扑选择合适的集群通信算法至关重要。 本文以数据并行经常使用的 all-reduce 为例来展示集群通信操作的数学性质。 All-reduce 在干什么? 图 1:all-reduce 如图 1 所示,一共 4个设备,每个设备上有一个矩阵(为简单起见,我们特意让每一行就一个元素), all-reduce 操作的目的是,让每个设备上的矩阵里的每一个位置的数值都是所有设备上对应位置的数值之和。 图2 如图 2 所示, all-reduce 可以通过 reduce-scatter 和 all-gather 这两个更基本的集群通信操作来实现。基于 ring 状通信可以高效的实现 reduce-scatter 和 all-gather,下面我们分别用示意图展示其过程。 reduce-scatter 的实现和性质 图 3:通过环状通信实现 reduce-scatter 从图 2...