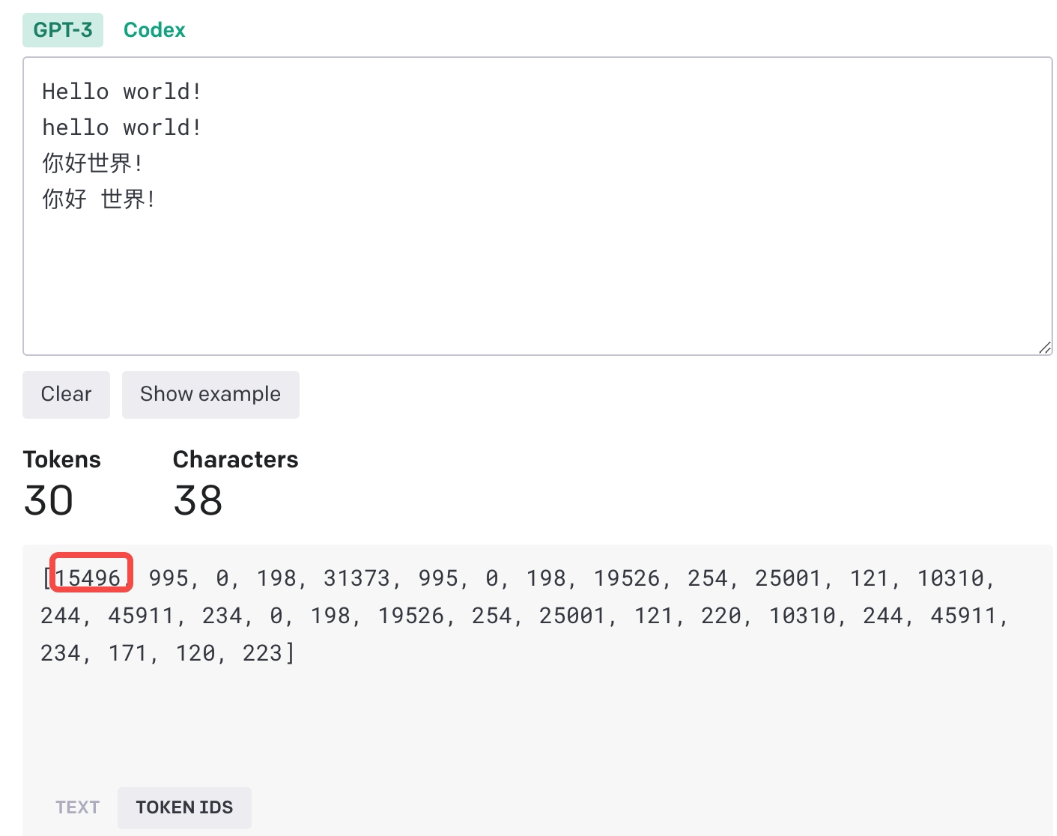
Tokenizer 背景与基础 目前的机器学习模型都是数学模型,其对应的输入要求必须是数字形式(number)的,而我们处理的真实场景往往会包含许多非数字形式的输入(有时候即使原始输入是数字形式,我们也需要转换),最典型的就是 NLP 中的文字(string),为了让文字能够作为输入参与到模型的计算中去,我们就需要构建一个映射关系(mapping):将对应的文字映射到一个数字形式上去,而其对应的数字就是 token。而对应的这个映射关系,就是我们的 tokenizer:他可以将文字映射到其对应的数字上去(encode),也可以将数字映射回对应的文字上(decode)。 诸如GPT-3/4以及LlaMA/LlaMA2大语言模型都采用了token的作为模型的输入输出,其输入是文本,然后将文本转为token(正整数),然后从一串token(对应于文本)预测下一个token。 进入OpenAI官网提供的tokenizer可以看到GPT-3tokenizer采用的方法。这里以Hello World为例说明。...
Large Model
2026-03-18
Qwen-VL 模型框架 Qwen-VL的整体网络架构由三个组件组成: LLM:使用 Qwen-7B 的预训练权重进行初始化。 视觉编码器:Qwen-VL 的可视化编码器使用ViT 架构,使用 Openclip 的 ViT-bigG 的预训练权重进行初始化。在训练和推理过程中,输入图像的大小都会调整为特定分辨率。视觉编码器通过以 14 步幅将图像分割成块来处理图像,生成一组图像特征。 位置感知视觉语言适配器:为了缓解长图像特征序列带来的效率问题,Qwen-VL 引入了一种视觉语言适配器来压缩图像特征。类似QFormer,该适配器包括一个随机初始化的单层交叉注意力模块。使用一组可训练向量(嵌入)作为query,并将视觉编码器中的图像特征作为交叉注意力作的key。该机制将视觉特征序列压缩到固定长度 256。 图像输入 图像不会直接以像素形式喂给语言模型(LLM)。 典型流程是: Visual Encoder :把图片编码成一串视觉特征(embedding/feature sequence)。 Adapter :把视觉特征映射到语言模型可接入的表征空间/维度。 最终得到:...
Large Model
2026-03-18
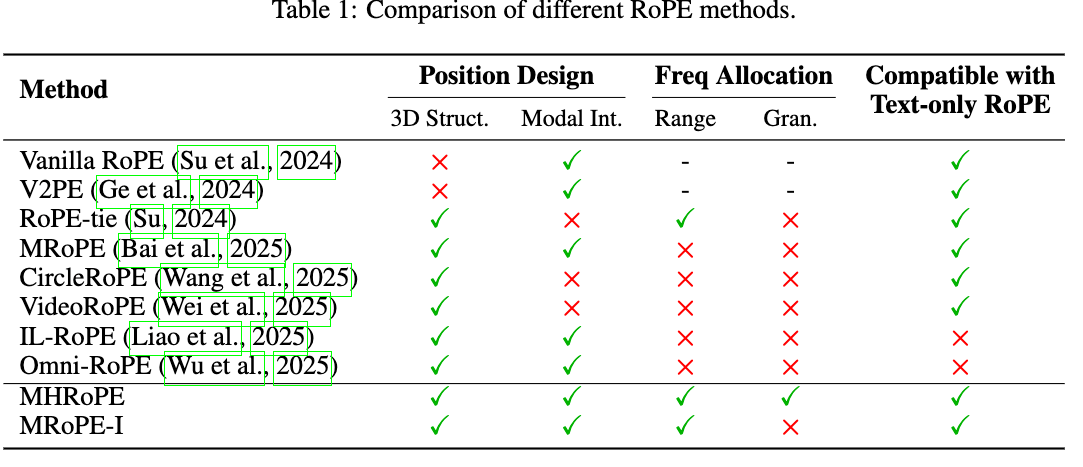
简介 论文: 《REVISITING MULTIMODAL POSITIONAL ENCODING IN VISION–LANGUAGE MODELS》 通过对多模态旋转位置嵌入(RoPE)的两个核心组件——位置设计和频率分配进行综合分析。通过实验,确定了三个关键指南:位置一致性、频率全利用和保留文本先验。基于这些见解,提出了多头RoPE(MHRoPE)和MRoPE-Interleave(MRoPE-I),这两种简单且即插即用的变体不需要任何架构更改。 为了构建更稳健的多模态位置编码,作者在MRoPE的基础上,系统地探索了三个未充分研究的方案: 位置设计——如何为文本和视觉标记分配无歧义、分离良好的坐标; 频率分配——如何将旋转频率分配到每个位置轴的嵌入维度; 与纯文本RoPE的兼容性——确保设计默认为标准RoPE,以便进行有效的迁移学习。 Vanilla RoPE RoPE与加性位置嵌入不同,RoPE对query和key向量应用旋转变换,从而将相对位置依赖直接纳入自注意力机制。给定位置 \(m\) 的查询向量 \(q\) 和位置 \(n\) 的键向量 \(k\) ,注意力分数...
Large Model
2026-03-10

问题背景 首先简化一下问题,本文所讨论的多模态,主要指图文混合的双模态,即输入和输出都可以是图文。可能有不少读者的第一感觉是:多模态模型难道不也是烧钱堆显卡,Transformer“一把梭”,最终“大力出奇迹”吗? 其实没那么简单。先看文本生成,事实上文本生成自始至终都只有一条主流路线,那就是语言模型,即建模条件概率 \(p(x_t|x_1,\cdots,x_{t-1})\) ,不论是最初的 n-gram语言模型,还是后来的Seq2Seq、GPT,都是这个条件概率的近似。也就是说,一直以来,人们对“实现文本生成需要往哪个方向走”是很明确的,只是背后所用的模型有所不同,比如LSTM、CNN、Attention乃至最近复兴的线性RNN等。所以, 文本生成确实可以All in Transformer来大力出奇迹,因为方向是标准的、清晰的。 然而,对于图像生成,并没有这样的“标准方向”。就本站所讨论过的图像生成模型,就有 VAE 、 GAN 、 Flow 、 Diffusion ,还有小众的 EBM...
Large Model
2026-03-06
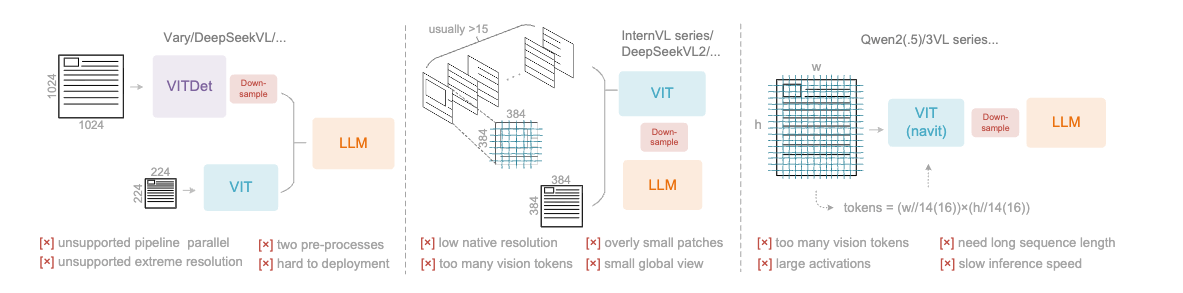
DeeSeek-OCR 简介 当前的大型语言模型(LLMs)在处理长文本时面临显著的计算挑战,其开销随序列长度呈二次增长。本文探索一种潜在的解决方案:将视觉模态作为高效的文本信息压缩媒介。 单张包含文档文本的图像,能够用显著更少的 token 表达丰富信息,相比等量的数字文本更为紧凑;这表明,通过视觉 token 进行光学压缩有望实现更高的压缩比。 本文关注视觉编码器如何提升 LLM 在处理文本信息时的效率,而非人类本就擅长的基础 VQA 任务 当前主流 VLM 视觉编码器的问题 第一类是以 Vary 为代表的双塔(dual-tower)架构,通过并行的 SAM 编码器来提升高分辨率图像处理时的视觉词表参数规模。该方法虽然在参数量与激活内存上更可控,但也存在显著缺点:需要对图像进行两套预处理,增加了部署复杂度;同时在训练中使编码器管线的并行化变得困难。 第二类是以 InternVL2.0 为代表的切片(tile-based)方法,通过将图像划分为小块并行处理,在高分辨率场景下降低激活内存。尽管这种方法能够处理极高分辨率,但由于其原生编码器分辨率通常较低(低于...
Large Model
2026-03-04
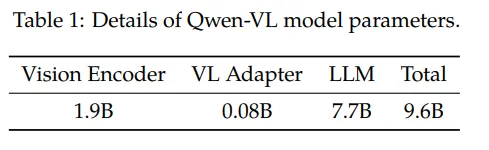
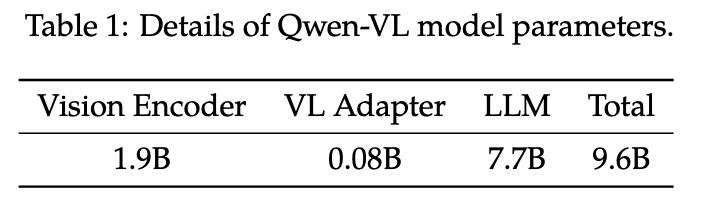
Qwen-VL系列 Qwen-VL 阿里巴巴的Qwen-VL是另一个比较经典的模型,十分值得作为案例介绍多模态大模型的训练要点。Qwen-VL使用Qwen-7B LLM作为语言模型基座,Openclip预训练的ViT-bigG作为视觉特征Encoder,随机初始化的单层Cross-Attention模块作为视觉和自然语言的的Adapter,总参数大小约9.6B。 如下图,Qwen-VL的训练过程分为三个阶段: Stage1 为预训练,目标是使用大量的图文Pair对数据对齐视觉模块和LLM的特征,这个阶段冻结LLM模块的参数; Stage2 为多任务预训练,使用更高质量的图文多任务数据(主要来源自开源VL任务,部分自建数据集),更高的图片像素输入,全参数训练; Stage3 为指令微调阶段,这个阶段冻结视觉Encoder模块,使用的数据主要来自大模型Self-Instruction方式自动生成,目标是提升模型的指令遵循和多轮对话能力。...
Large Model
2026-03-04
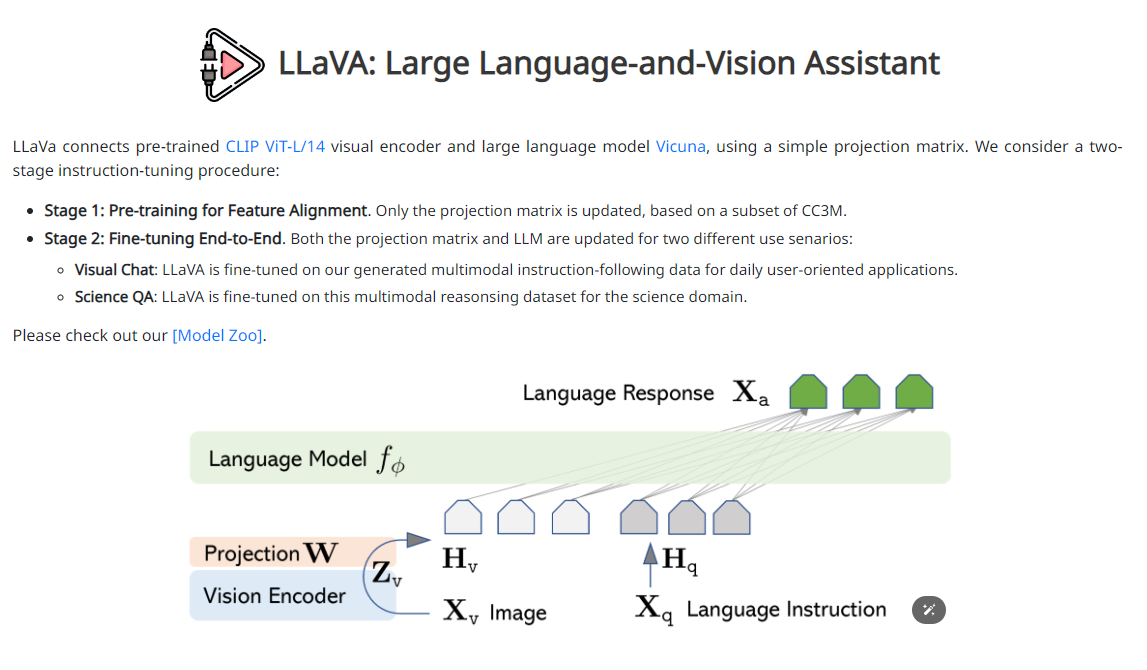
项目: https://llava-vl.github.io/ github: https://github.com/haotian-liu/LLaVA 一句话 优点 : 极大简化了VLM的训练方式:Pre-training + Instruction Tuning 训练量得到简化:1M量级数据+ 8卡A100 → 一天完成训练 LLaVA LLaVA是2023的连续工作,包含了LLaVA 1.0, 1.5, 1.6几个版本(后续会有更多),也是2023年多模态领域妥妥的顶流。发表9个月620的stars,GitHub超过12K的stars。 LLaVA它的网络结构简单、微调成本比较低,任何研究组、企业甚至个人都可以基于它构建自己的领域的多模态模型。 非常建议对多模态大模型感兴趣的朋友关注LLaVA这篇工作。 简介...
3D Model
2026-02-13
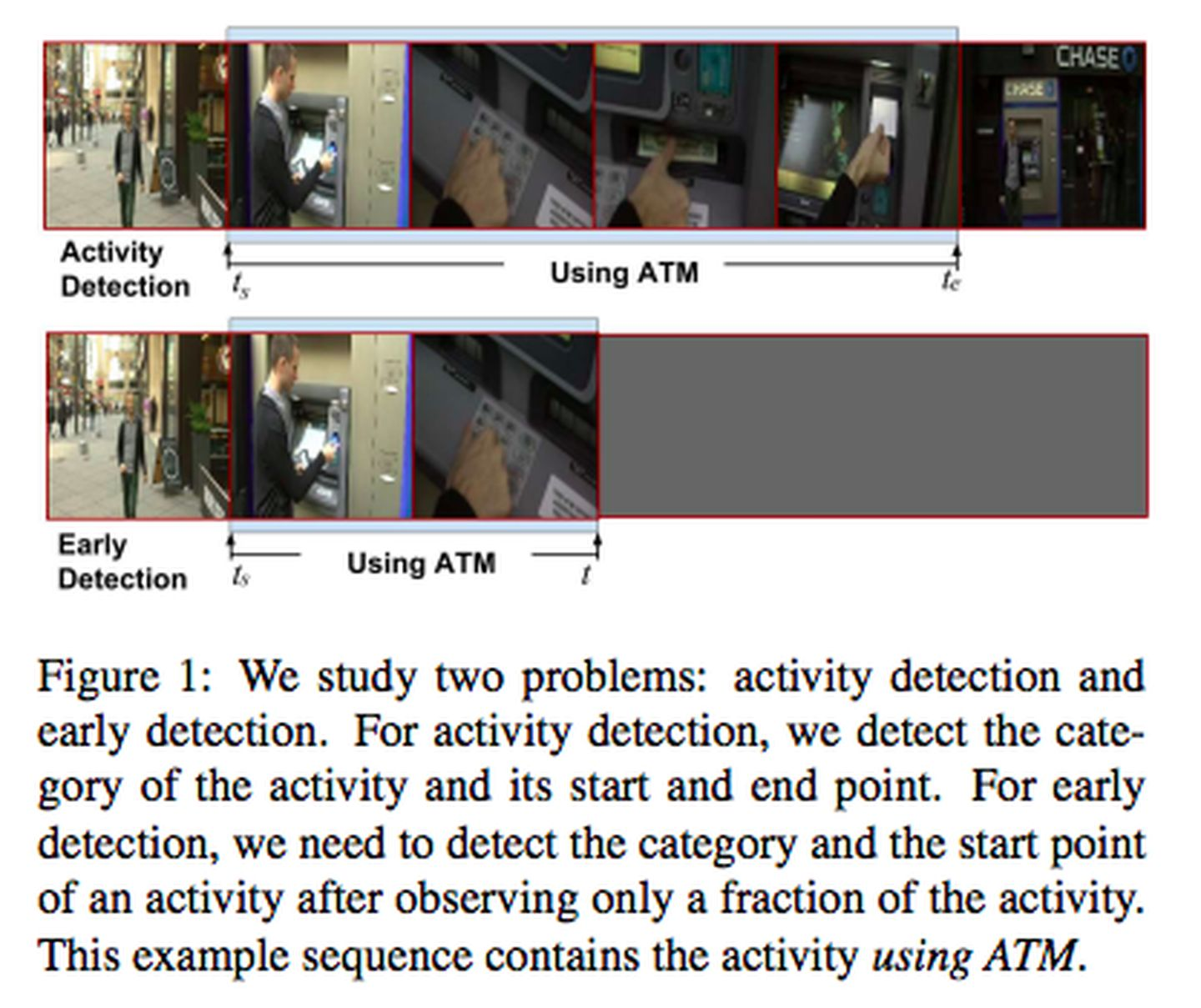
Temporal action detection可以分为两种setting, 一是offline的,在检测时视频是完整可得的,也就是可以利用完整的视频检测动作发生的时间区间(开始时间+结束时间)以及动作的类别; 二是 online的,即处理的是一个视频流,需要在线的检测(or 预测未来)发生的动作类别,但无法知道检测时间点之后的内容。online的问题设定更符合surveillance的需求,需要做实时的检测或者预警;offline的设定更符合视频搜索的需求,比如youtube可能用到的 highlight detection / preview generation。 问题演化 Early action detection -> Online action detection -> Online action anticipation: 在学术界关注online action detection之前,有一个相似的问题叫做 early event detection ,问题定义是 “detect the event as soon as possible, after it...
3D Model
2026-02-12

Classification,Detection Classification:给定预先裁剪好的视频片段,预测其所属的行为类别 Detection:视频是未经过裁剪的,需要先进行人的检测where和行为定位(分析行为的始末时间)when,再进行行为的分类what。 通常所说的行为识别更偏向于对时域预先分割好的序列进行行为动作的分类,即 Trimmed Video Action Classification。 Two-Stream Two-stream convolutional networks 简介 Two-Stream CNN网络顾名思义分为两个部分, 空间流 处理 RGB图像 ,得到形状信息; 时间流/光流 处理 光流图像 ,得到运动信息。 两个流最后经过softmax后,做分类分数的融合,可以采用平均法或者是SVM。不过这两个流都是二维卷积操作。最终联合训练,并分类。 如图所示,其实做法非常的简单,相当于训练两个CNN的分类器。一个是专门对于 RGB 图的, 一个专门对于光流图的, 然后将两者的结果进行一个 fushion 的过程。...
3D Model
2026-02-12

深度相机 “工欲善其事必先利其器‘’我们先从能够获取RGBD数据的相机开始谈起。首先我们来看一看其分类。 根据其工作原理主要分为三类: 1.双目方案 基于双目立体视觉的深度相机类似人类的双眼,和基于TOF、结构光原理的深度相机不同,它不对外主动投射光源,完全依靠拍摄的两张图片(彩色RGB或者灰度图)来计算深度,因此有时候也被称为被动双目深度相机。比较知名的产品有STEROLABS 推出的 ZED 2K Stereo Camera和Point Grey 公司推出的 BumbleBee。 双目立体视觉是基于视差原理,由多幅图像获取物体三维几何信息的方法。在机器视觉系统中, 双目视觉一般由双摄像机从不同角度同时获取周围景物的两幅数字图像,或有由单摄像机在不同时刻从不同角度获取周围景物的两幅数字图像 ,并基于视差原理即可恢复出物体三维几何信息,重建周围景物的三维形状与位置。 双目视觉有的时候我们也会把它称为体视,是人类利用双眼获取环境三维信息的主要途径。从目前来看,随着机器视觉理论的发展,双目立体视觉在机器视觉研究中发回来看了越来越重要的作用 为什么非得用双目相机才能得到深度?...
3D Model
2026-02-12
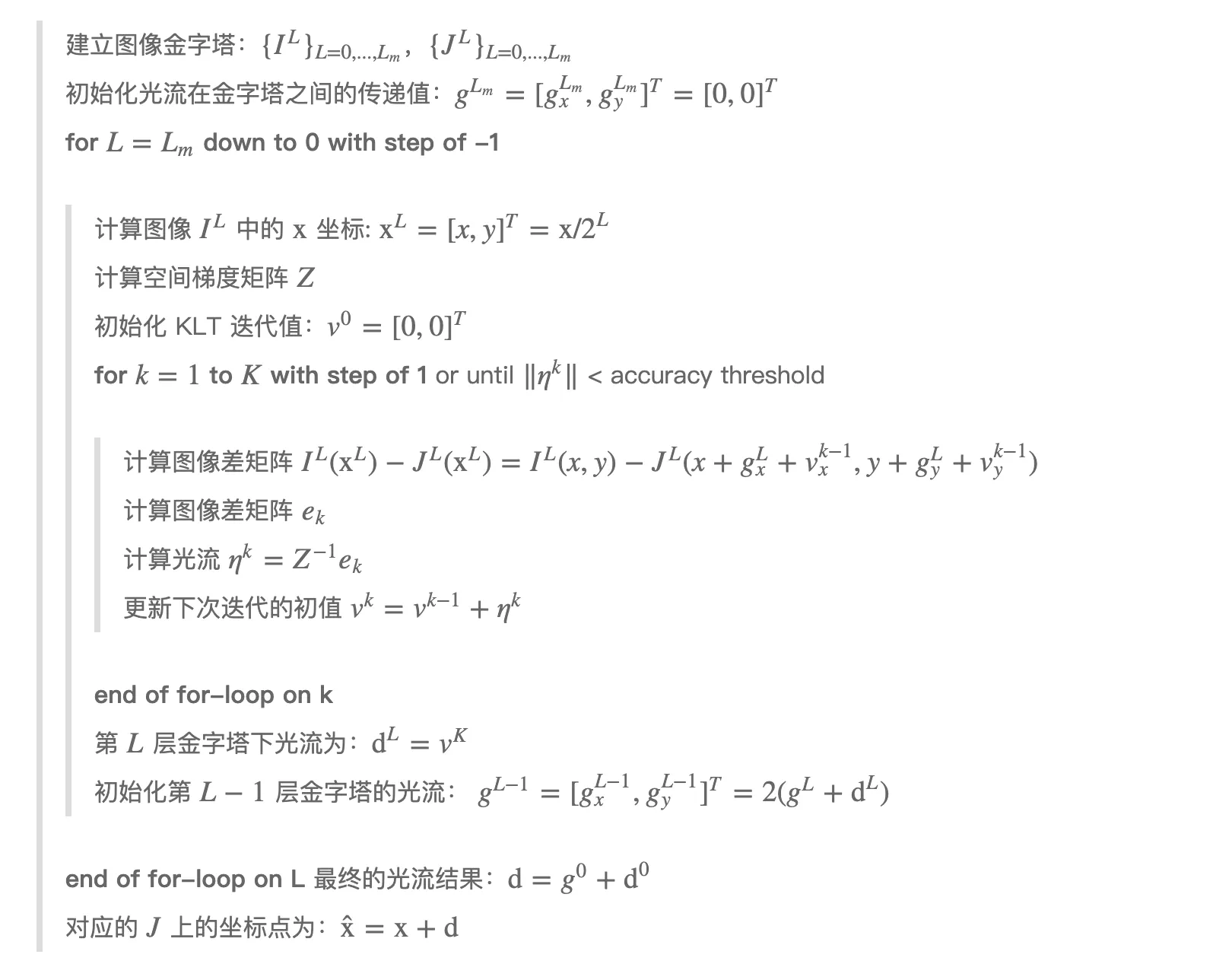
光流(Optical Flow)是物体在三维空间中的运动(运动场)在二维图像平面上的投影,由物体与相机的相对速度产生,反映了微小时间内物体对应的图像像素的运动方向和速度。 KLT 是基于光流原理的一种特征点跟踪算法,本文首先介绍光流原理,然后介绍 KLT 及相关 KLT 变种算法。 Optical Flow 光流法假设: 亮度恒定,图像中物体的像素亮度在连续帧之间不会发生变化; 短距离(短时)运动,相邻帧之间的时间足够短,物体运动较小; 空间一致性,相邻像素具有相似的运动; 记 \(I(x,y,t)\) 为 \(t\) 时刻像素点 \((x,y)\) 的像素值,那么根据前两个假设,可得到: \[I(x,y,t)=I(x+dx,y+dy,t+dt)\] 一阶泰勒展开: \[I(x+dx,y+dy,t+dt)=I(x,y,t)+\frac{\partial I}{\partial x}dx+\frac{\partial I}{\partial y}dy+\frac{\partial I}{\partial t}dt\] 由此可得: \[\frac{\partial I}{\partial...
3D Model
2026-02-12
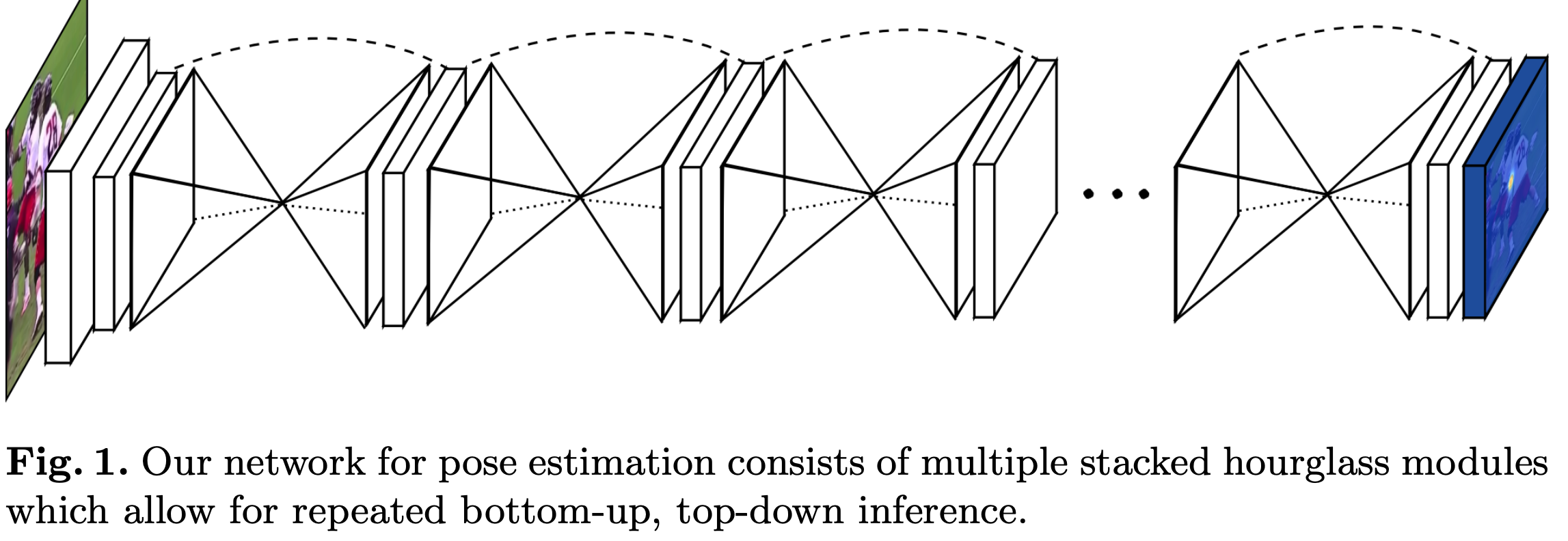
论文介绍了一种新的网络结构用于人体姿态检测,作者在论文中展现了不断重复bottom-up、top-down过程以及运用intermediate supervison(中间监督)对于网络性能的提升,下面来介绍Stacked Hourglass Networks. 简介 理解人类的姿态对于一些高级的任务比如行为识别来说特别重要,而且也是一些人机交互任务的基础。作者提出了一种新的网络结构Stacked Hourglass Networks来对人体的姿态进行识别,这个网络结构能够捕获并整合图像所有尺度的信息。之所以称这种网络为Stacked Hourglass Networks,主要是它长得很像堆叠起来的沙漏,如下图所示: 这种堆叠在一起的Hourglass模块结构是对称的,bottom-up过程将图片从高分辨率降到低分辨率,top-down过程将图片从低分辨率升到高分辨率,这种网络结构包含了许多pooling和upsampling的步骤,pooling可以将图片降到一个很低的分辨率,upsampling可以结合多个分辨率的特征。 下面介绍具体的网络结构。 Hourglass Module...