76. 最小覆盖子串 题目 给定两个字符串 s 和 t ,长度分别是 m 和 n ,返回 s 中的 最短窗口 子串 ,使得该子串包含 t 中的每一个字符( 包括重复字符 )。如果没有这样的子串,返回空字符串 "" 。 测试用例保证答案唯一。 示例 1: 输入:s = "ADOBECODEBANC", t = "ABC"
输出:"BANC"
解释:最小覆盖子串 "BANC" 包含来自字符串 t 的 'A'、'B' 和 'C'。 示例 2: 输入:s = "a", t = "a"
输出:"a"
解释:整个字符串 s 是最小覆盖子串。 示例 3: 输入: s = "a", t = "aa"
输出: ""
解释: t 中两个字符 'a' 均应包含在 s 的子串中,
因此没有符合条件的子字符串,返回空字符串。 提示: m == s.length n == t.length 1 <= m, n <= 10 5 s 和 t 由英文字母组成 题解 这是一个经典的 滑动窗口 (Sliding Window) 问题 我们需要维护一个动态的窗口 [left, right] : 右移扩大 :不断移动...
Python
2026-01-11
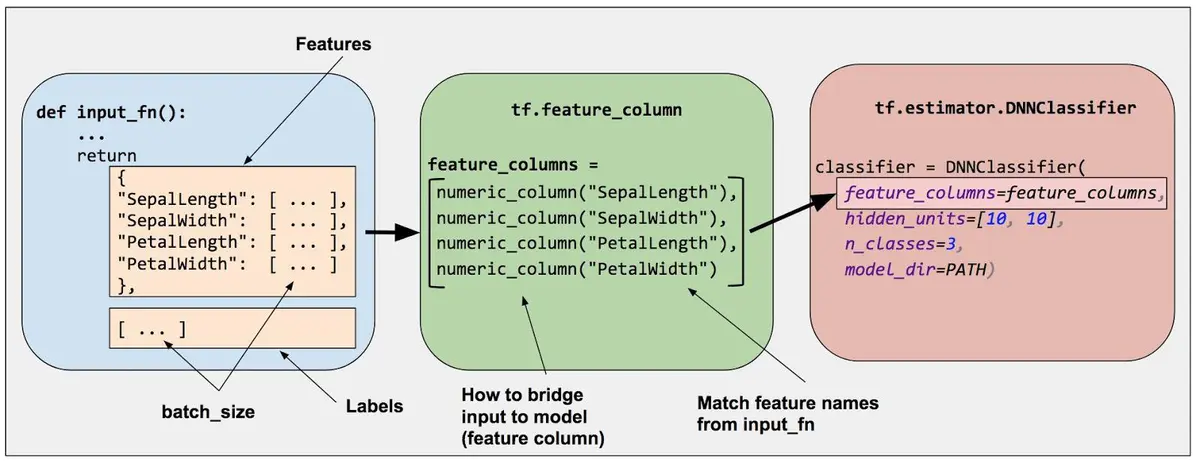
Overview 特征工程是机器学习流程中重要的一个环节,即使是通常用来做端到端学习的深度学习模型在训练之前也免不了要做一些特征工程相关的工作。Tensorflow平台提供的FeatureColumn API为特征工程提供了强大的支持。 Feature cloumns是原始数据和Estimator模型之间的桥梁,它们被用来把各种形式的原始数据转换为模型能够使用的格式。深度神经网络只能处理数值数据,网络中的每个神经元节点执行一些针对输入数据和网络权重的乘法和加法运算。然而,现实中的有很多非数值的类别数据,比如产品的品牌、类目等,这些数据如果不加转换,神经网络是无法处理的。另一方面,即使是数值数据,在仍给网络进行训练之前有时也需要做一些处理,比如标准化、离散化等。 在Tensorflow中,通过...
Reinforcement Learning
2026-01-11

引言与背景 蒙特卡洛方法是强化学习中的重要算法类别,它标志着从基于模型到无模型算法的转变。这类算法不依赖环境模型,而是通过与环境的直接交互获取经验数据来学习最优策略。 蒙特卡洛方法在强化学习算法谱系中处于"无模型"方法的起始位置,是从基于模型的方法(如值迭代和策略迭代)向无模型方法过渡的第一步。 无模型强化学习的核心理念可以简述为:如果没有模型,我们必须有数据;如果没有数据,我们必须有模型;如果两者都没有,我们就无法找到最优策略。在强化学习中,"数据"通常指智能体与环境交互的经验。 均值估计问题 在介绍蒙特卡洛强化学习算法之前,我们首先需要理解均值估计问题,这是理解从数据而非模型中学习的基础。 考虑一个可以取有限实数集合 X 中值的随机变量 X ,我们的任务是计算 X 的均值或期望值: E[...
Python
2026-01-11
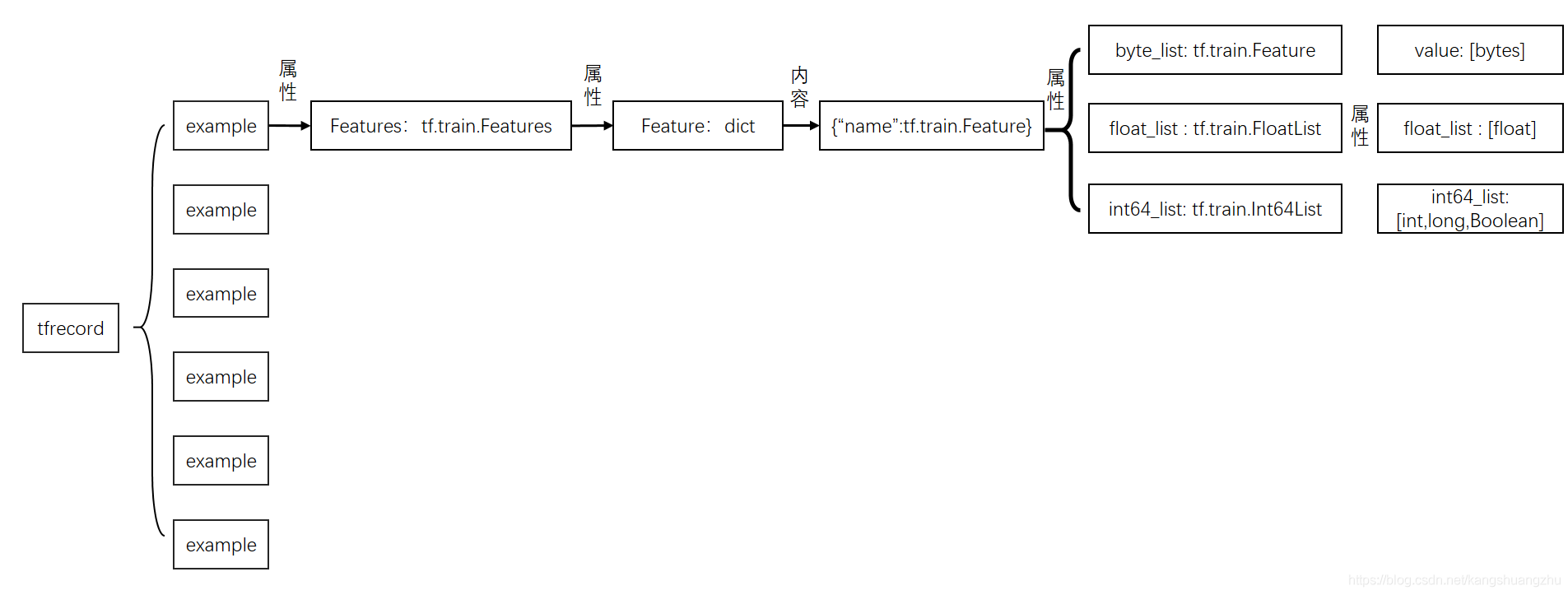
TFRecord TFRecord 是谷歌推荐的一种二进制文件格式,理论上它可以保存任何格式的信息。 tf.Example是一个Protobuffer定义的message,表达了一组string到bytes value的映射。TFRecord文件里面其实就是存储的序列化的tf.Example。关于Protobuffer参考Protobuf 终极教程。 example 我们可以具体到相关代码去详细地看下tf.Example的构成。作为一个Protobuffer message,它被定义在文件core/example/example.proto中: [代码] 只是包了一层Features的message。我们还需要进一步去查找Features的message定义: [代码] 到这里,我们可以看出...
Large Model
2026-01-11

UITARS 简介 UITARS(User Interface Task Automation and Reasoning System)是由字节跳动(ByteDance)研发的原生 GUI 智能体模型: 输入方式:仅使用屏幕截图作为视觉输入 交互方式:执行类人操作(键盘输入、鼠标点击、拖拽等) 模型特性:端到端的原生智能体模型,无需复杂的中间件或框架 传统 GUI 智能体的开发往往依赖于文本信息,例如 HTML 结构和可访问性树。虽然这些方法取得了一些进展,但它们也存在一些局限性: 平台不一致性:不同平台的 GUI 结构差异很大,导致智能体难以跨平台通用。 信息冗余:文本信息往往过于冗长,增加了模型的处理负担。 访问限制:获取系统底层的文本信息通常需要较高的权限,限制了应用的范围。 模块化...
Reinforcement Learning
2026-01-11
引言与背景 价值函数方法是强化学习中的核心技术,它解决了传统表格方法在处理大型状态或动作空间时的效率问题。本文探讨了从表格表示向函数表示的转变,这是强化学习算法发展的重要里程碑。 在强化学习的发展路径中,价值函数方法位于从基于模型到无模型、从表格表示到函数表示的演进过程中。它结合了时序差分学习的思想,并通过函数近似技术来处理复杂环境。 价值表示:从表格到函数 表格与函数表示的对比 传统的表格方法将状态值存储在一个表格中: 而函数近似方法则使用参数化函数来表示这些值,例如: [公式] 其中 [Math] 称作是状态 s 的特征向量, w 是参数向量。 两种不同的表现形式的区别主要体现在以下几个方面: 值的检索方式 值的更新方式 函数复杂度与近似能力 函数的复杂度决定了其近似的能力: 一阶线性函...
Reinforcement Learning
2026-01-11

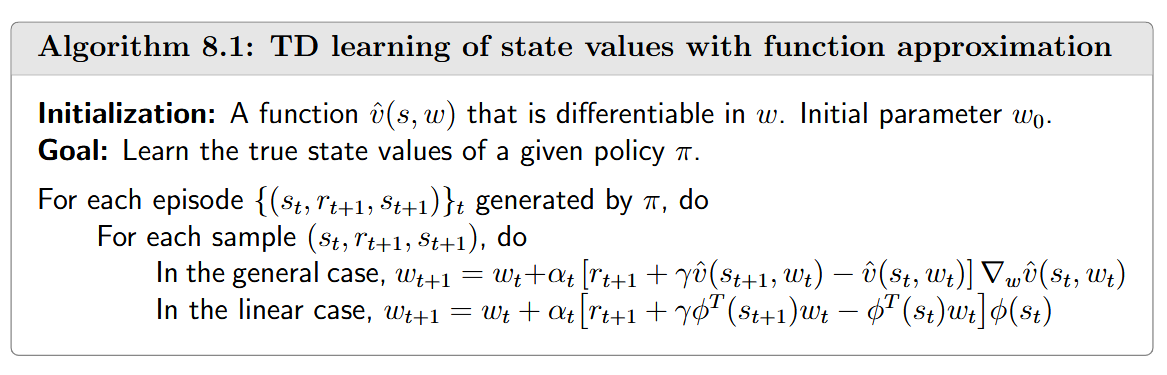
引言 时序差分(TemporalDifference,TD)方法是强化学习中的一类核心算法,它结合了动态规划与蒙特卡洛方法的优点。TD方法是无模型(modelfree)学习方法,不需要环境模型即可学习价值函数和最优策略。 TD方法的核心特点是通过比较不同时间步骤的估计值之间的差异来更新价值函数,这种差异被称为"时序差分误差"(TD error)。TD方法可以被视为解决贝尔曼方程或贝尔曼最优方程的特殊随机逼近算法。 基础TD算法:状态值函数学习 给定策略 [Math] ,基础TD算法用于估计状态值函数 [Math] 。假设我们有一些按照策略 [Math] 生成的经验样本 (s_0, r_1, s_1, ..., s_t, r_{t+1}, s_{t+1}, ...) ,TD算法的更新规则为: ...