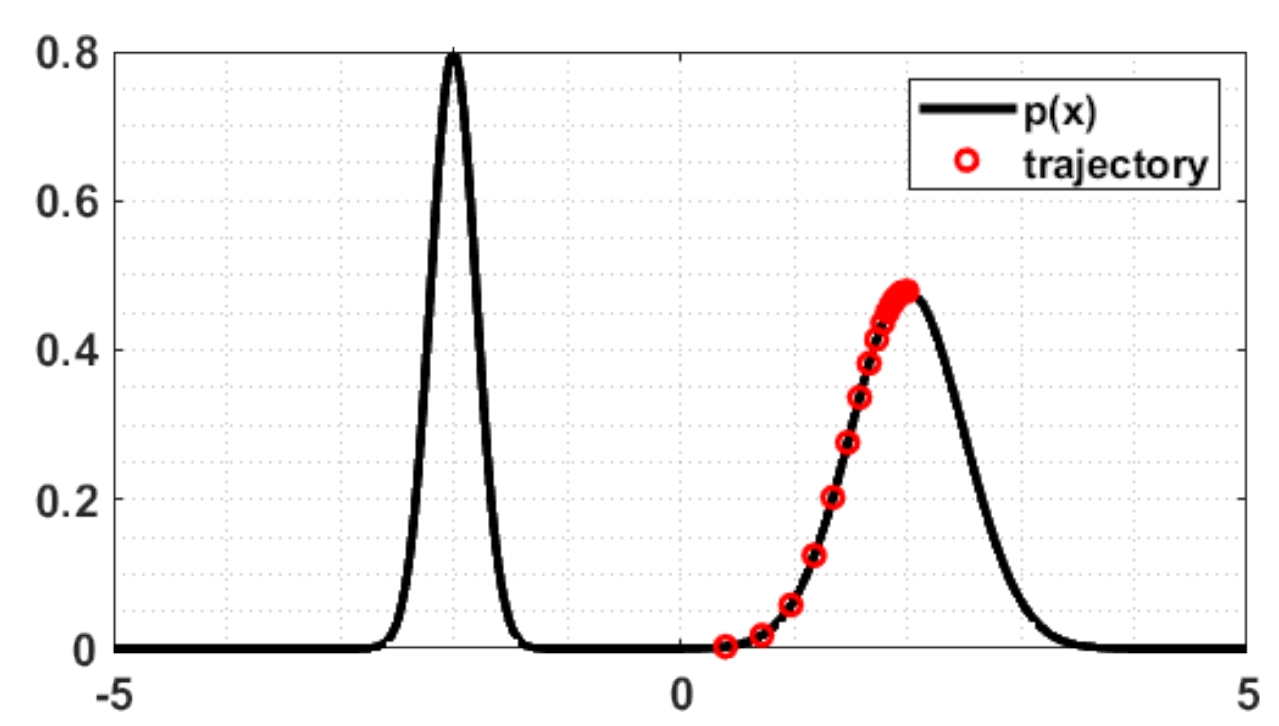
朗之万动力学(Langevin Dynamics)是扩散模型和score matching方法中的采样过程,是文本生成图像中的一个重要步骤。想要洞悉文生图的基本原理,朗之万动力学是绕不开的话题。 朗之万动力学原理简介 本文的主要内容是基于以下教程: Tutorial on Diffusion Models for Imaging and Vision 此教程写的非常好,非常推荐大家学习。教程的语言风格也很亲切,时不时地蹦出诸如“这是地球人能想出来的公式?”这样的话,为你枯燥的学习过程增添些许趣味。 朗之万动力学(Langevin Dynamics)是扩散模型和score matching方法中的采样过程,是文本生成图像中的一个重要步骤。想要洞悉文生图的基本原理,朗之万动力学是绕不开的话题。 给定一个已知的概率分布 \(p(x)\) ,我们的目标是采样出概率密度更大的那些样本。解决这个问题有多种方法,比如生成伪随机均匀分布,然后用概率分布变换的方法;或者用马尔可夫链蒙特卡洛方法(MCMC)。而朗之万动力学给出的方法是这样: 随机选取空间中一个点(这是很简单的,采用高斯生成与 \(x\)...
Generative Model
2026-03-04

SD模型原理 SD是CompVis、Stability AI和LAION等公司研发的一个文生图模型,它的模型和代码是开源的,而且训练数据LAION-5B也是开源的。SD在开源90天github仓库就收获了 33K的stars ,可见这个模型是多受欢迎。 SD是一个 基于latent的扩散模型 ,它在UNet中引入text condition来实现基于文本生成图像。SD的核心来源于 Latent Diffusion 这个工作,常规的扩散模型是基于pixel的生成模型,而Latent Diffusion是基于latent的生成模型,它先采用一个autoencoder将图像压缩到latent空间,然后用扩散模型来生成图像的latents,最后送入autoencoder的decoder模块就可以得到生成的图像。 基于latent的扩散模型的优势在于计算效率更高效,因为图像的latent空间要比图像pixel空间要小,这也是SD的核心优势...
Generative Model
2026-03-04

Flow Matching 其实是将 flow 的离散形式转换为连续形式(连续标准化流CNF),进而可以看成是一个ODE方程,实际求解的是这个ODE 求解的核心思路是:构建速度场通过数值积分求解位移,也就是通过预测速度场,从而转为ode求解 从概率路径的角度上来说,解是无穷多的,不同的方法本质上讲是在于构造尽可能简单、直接、易解的概率路径 通过不同的条件概率路径,可以构造出VP(score matching)、 VE(diffusion)、OT(1-rectified flow)等形式 实际的边缘概率分布路径并不是一条直线 ,我们是通过拟合条件速度场来逼近边缘速度场, 即使我们证明了对于参数 \(\theta\) 来说优化目标是等价的,但终究还是有一些gap Flow-based Models Normalizing Flow Normalizing Flow 是一种基于 变换 对概率分布进行建模的模型,其通过一系列 离散且可逆的变换 实现任意分布与先验分布(例如标准高斯分布)之间的相互转换。在 Normalizing Flow...
Generative Model
2026-03-04
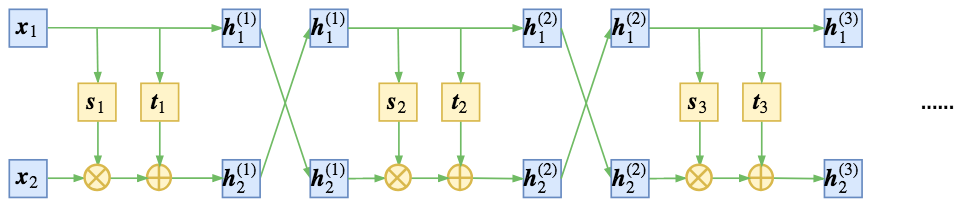
精巧的flow 不得不说,flow模型是一个在设计上非常精巧的模型。总的来看,flow就是想办法得到一个encoder将输入 𝑥 编码为隐变量 𝑧,并且使得 𝑧 服从标准正态分布。 得益于flow模型的精巧设计,这个encoder是可逆的,从而我们可以立马从encoder写出相应的decoder(生成器)出来,因此,只要encoder训练完成,我们就能同时得到decoder,完成生成模型的构建 。 为了完成这个构思,不仅仅要使得模型可逆,还要使得对应的雅可比行列式容易计算,为此,NICE提出了加性耦合层,通过多个加性耦合层的堆叠,使得模型既具有强大的拟合能力,又具有单位雅可比行列式。就这样,一种不同于VAE和GAN的生成模型——flow模型就这样出来了,它通过巧妙的构造,让我们能直接去拟合概率分布本身。 待探索的空间...
Generative Model
2026-03-03

1-Rectified Flow 可以认为是 flow matching的ot最优传输形式 Rectified Flow目的是将多对多无约束映射 转变成 一对一有约束映射。 ode会保证路径是“因果”的,也就是避免相交的情况 2-Rectified Flow或者叫Reflow 核心的实际上是加噪过程的样本交点数目降低,交点处模型无法精确学习向量场,交点数少了,模型在每个点预测都更准了,加噪过程是直线,所以能更少步数走到起点(但整体采样过程不是直线) 原本随机采样的DDPM模型中,也隐含了一个确定性的采样过程DDIM,它的连续极限也是一个ODE 。 细想上述过程, 可以发现不管是“DDPM→DDIM”还是“SDE→ODE”,都是从随机采样模型过渡到确定性模型,而如果我们一开始的目标就是ODE,那么该过程未免显得有点“迂回”了 。在本文中,笔者尝试给出ODE扩散模型的直接推导,并揭示了它与雅可比行列式、热传导方程等内容的联系。 Rectified Flow 理论推导 微分方程...
Generative Model
2026-03-03

基于文章 《Elucidating the Design Space of Diffusion-Based Generative Models》 来统一扩散模型框架 通用扩散模型框架推导 加噪公式 Flow Matching的一步加噪公式 \[\mathbf{x}_t=(1-t)\mathbf{x}_0+t\varepsilon\] 写成概率分布形式: \[p(\mathbf{x}_t|\mathbf{x}_0)=\mathcal{N}(\mathbf{x}_t;(1-t)\mathbf{x}_0,t^2\mathbf{I})\] Score Matching的一步加噪公式 \[\mathbf{x}_t=\mathbf{x}_0+\sigma_t\varepsilon \] 写成概率分布形式: \[p(\mathbf{x}_t|\mathbf{x}_0)=\mathcal{N}(\mathbf{x}_t;\mathbf{x}_0,\sigma_t^2\mathbf{I})\] DDPM/DDIM的一步加噪公式...
Generative Model
2026-03-03

背景 本文主要是 《NICE: Non-linear Independent Components Estimation》 一文的介绍和实现。这篇文章也是glow这个模型的基础文章之一,可以说它就是glow的奠基石。 艰难的分布 众所周知,目前主流的生成模型包括VAE和GAN,但事实上除了这两个之外,还有基于flow的模型(flow可以直接翻译为“流”,它的概念我们后面再介绍)。事实上flow的历史和VAE、GAN它们一样悠久,但是flow却鲜为人知。在我看来,大概原因是flow找不到像GAN一样的诸如“造假者-鉴别者”的直观解释吧,因为flow整体偏数学化,加上早期效果没有特别好但计算量又特别大,所以很难让人提起兴趣来。不过现在看来,OpenAI的这个好得让人惊叹的、基于flow的glow模型,估计会让更多的人投入到flow模型的改进中。 glow模型生成的高清人脸 生成模型的本质,就是希望用一个我们知道的概率模型来拟合所给的数据样本, 也就是说,我们得写出一个带参数 \(𝜃\) 的分布 \(q_{\boldsymbol{\theta}}(\boldsymbol{x})\)...
Generative Model
2026-03-03
本文受启发于著名的国外博文 《Wasserstein GAN and the Kantorovich-Rubinstein Duality》 ,内容跟它大体上相同,但是删除了一些冗余的部分,对不够充分或者含糊不清的地方作了补充。 Wasserstein距离 显然,整篇文章必然围绕着Wasserstein距离( \(\mathcal{W}\) 距离)来展开。假设我们有了两个概率分布 \(p(x),q(x)\) ,那么Wasserstein距离的定义为 \[\mathcal{W}[p,q]=\inf_{\gamma\in \Pi[p,q]} \iint \gamma(\boldsymbol{x},\boldsymbol{y}) d(\boldsymbol{x},\boldsymbol{y}) d\boldsymbol{x}d\boldsymbol{y}\] 事实上,这也算是最优传输理论中最核心的定义了。 成本函数 首先 \(d(x,y)\) ,它不一定是距离,其准确含义应该是一个成本函数,代表着从 \(x\) 运输到 \(y\) 的成本。常用的 \(d\) 是基于 \(l\)...
Computer Vision
2026-02-26

上图是Yolo v4中,对各种detector部件的总结:包含Input、backbone、neck、head、... Backbone 轻量级网络系列 Neck 例如:SPP 、 ASPP 、 RFB、 SAM 用来增加感受野 特征融合,主要是指不同输出层直接的特征融合,主要包括FPN、PAN、SFAM、ASFF和BiFPN。 结构 Path Aggregation Blcok Deformable Convolution系列 One stage Yolo系列 Focal Loss & RetinaNet Two-Stage Faster R-CNN R-FCN Anchor Free Anchor-Free Transformer DETR Problems 目标检测中的多尺度问题 NMS及其改进 IoU loss系列 目标检测中mAP计算
Computer Vision
2026-02-26
mAP定义及相关概念 mAP: mean Average Precision, 即各类别AP的平均值 AP: PR曲线下面积,后文会详细讲解 PR曲线: Precision-Recall曲线 Precision: TP / (TP + FP) Recall: TP / (TP + FN) TP: IoU>0.5的检测框数量(同一Ground Truth只计算一次) FP: IoU<=0.5的检测框,或者是检测到同一个GT的多余检测框的数量 FN: 没有检测到的GT的数量 mAP的具体计算 由前面定义,我们可以知道,要计算mAP必须先绘出各类别PR曲线,计算出AP。而如何采样PR曲线,VOC采用过两种不同方法。 在VOC2010以前,只需要选取当Recall >= 0, 0.1, 0.2, ..., 1共11个点时的Precision最大值,然后AP就是这11个Precision的平均值。 在VOC2010及以后,需要针对每一个不同的Recall值(包括0和1),选取其大于等于这些Recall值时的Precision最大值,然后计算PR曲线下面积作为AP值。 mAP计算示例 假设,对于...
Computer Vision
2026-02-26

简介 "Anchor-free"(无锚点)是一种目标检测方法,与传统的使用锚框(anchor boxes)的方法(例如Faster R-CNN)不同。在传统方法中,锚框是预先定义的、具有不同尺寸和长宽比的矩形区域,用于捕捉不同尺寸和形状的目标。而在"anchor-free"方法中,不再使用锚框,而是直接预测目标的位置和形状,通常使用网络输出的热图和偏移信息。 以下是对"anchor-free"方法的一些关键理解点: 无需预定义锚框: 在传统目标检测方法中,需要事先定义和生成一组锚框,这可能需要大量的人工工作。而在"anchor-free"方法中,不再需要锚框,模型可以自动学习目标的位置和形状。 直接位置和形状回归: "anchor-free"方法通过输出的热图来表示目标的存在概率,并使用偏移信息来定位目标的中心和形状。这些热图和偏移信息通常通过卷积神经网络预测。 适用于不规则目标: 传统的锚框在捕捉不规则形状的目标时可能会有困难,而"anchor-free"方法可以更好地适应不规则目标的检测。 减少计算复杂性:...
Computer Vision
2026-02-26
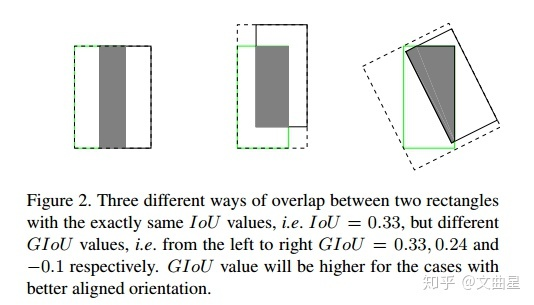
IOU(Intersection over Union) 特性(优点) IoU就是我们所说的 交并比 ,是目标检测中最常用的指标,在anchor-based的方法中,他的作用不仅用来确定正样本和负样本,还可以用来评价输出框(predict box)和ground-truth的距离。 \[IoU = \frac{|A \cap B|}{|A \cup B|}
\] 可以说 它可以反映预测检测框与真实检测框的检测效果。 还有一个很好的特性就是 尺度不变性 ,也就是对尺度不敏感(scale invariant), 在regression任务中,判断predict box和gt的距离最直接的指标就是IoU。 (满足非负性;同一性;对称性;三角不等性) import numpy as np
def Iou(box1, box2, wh=False):
if wh == False:
xmin1, ymin1, xmax1, ymax1 = box1
xmin2, ymin2, xmax2, ymax2 = box2
else:
xmin1, ymin1 =...