
11. 盛最多水的容器 题目 给定一个长度为 n 的整数数组 height 。有 n 条垂线,第 i 条线的两个端点是 (i, 0) 和 (i, height[i]) 。 找出其中的两条线,使得它们与 x 轴共同构成的容器可以容纳最多的水。 返回容器可以储存的最大水量。 说明: 你不能倾斜容器。 示例 1: 输入:[1,8,6,2,5,4,8,3,7]
输出:49
解释:图中垂直线代表输入数组 [1,8,6,2,5,4,8,3,7]。在此情况下,容器能够容纳水(表示为蓝色部分)的最大值为 49。 示例 2: 输入:height = [1,1]
输出:1 提示: n == height.length 2 <= n <= 10 5 0 <= height[i] <= 10 4 题解 在初始时,左右指针分别指向数组的左右两端,它们可以容纳的水量为 \(min(1,7)∗8=8\) 。 此时我们需要移动一个指针。移动哪一个呢?直觉告诉我们,应该移动对应数字较小的那个指针(即此时的左指针)。这是因为,由于容纳的水量是由 两个指针指向的数字中较小值∗指针之间的距离...
Computer Vision
2026-01-11

空洞卷积 Dilated/Atrous Convolution 或者是 Convolution with holes 从字面上就很好理解,是在标准的 convolution map 里注入空洞,以此来增加 reception field。相比原来的正常convolution,dilated convolution 多了一个 hyperparameter 称之为 dilation rate 指的是kernel的间隔数量(e.g. 正常的 convolution 是 dilatation rate 1)。 一个简单的例子 一维情况下空洞卷积的公式如下 [Formula] 不过光理解他的工作原理还是...
Computer Vision
2026-01-11
PA Pixel Accuracy(PA,像素精度):这是最简单的度量,为标记正确的像素占总像素的比例。 [公式] 图像中共有k+1(包含背景)类, p_{ii} 表示将第i类分成第 i 类的像素数量(正确分类的像素数量), p_{ij} 表示将第 i 类分成第 j 类的像素数量(所有像素数量) 因此该比值表示正确分类的像素数量占总像素数量的比例。 优点:简单 缺点:如果图像中大面积是背景,而目标较小,即使将整个图片预测为背景,也会有很高的PA得分,因此该指标不适用于评价以小目标为主的图像分割效果。 MPA Mean Pixel Accuracy(MPA,均像素精度):是PA的一种简单提升,计算每个类内被正确分类像素数的比例,之后求所有类的平均。 [公式] MIoU Mean Interse...
Python
2026-01-11
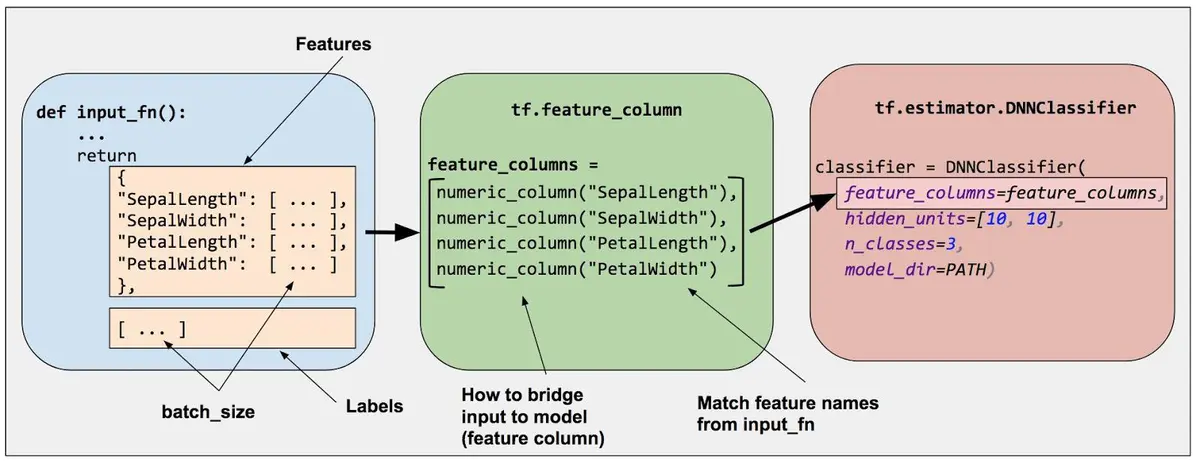
Overview 特征工程是机器学习流程中重要的一个环节,即使是通常用来做端到端学习的深度学习模型在训练之前也免不了要做一些特征工程相关的工作。Tensorflow平台提供的FeatureColumn API为特征工程提供了强大的支持。 Feature cloumns是原始数据和Estimator模型之间的桥梁,它们被用来把各种形式的原始数据转换为模型能够使用的格式。深度神经网络只能处理数值数据,网络中的每个神经元节点执行一些针对输入数据和网络权重的乘法和加法运算。然而,现实中的有很多非数值的类别数据,比如产品的品牌、类目等,这些数据如果不加转换,神经网络是无法处理的。另一方面,即使是数值数据,在仍给网络进行训练之前有时也需要做一些处理,比如标准化、离散化等。 在Tensorflow中,通过...
Python
2026-01-11
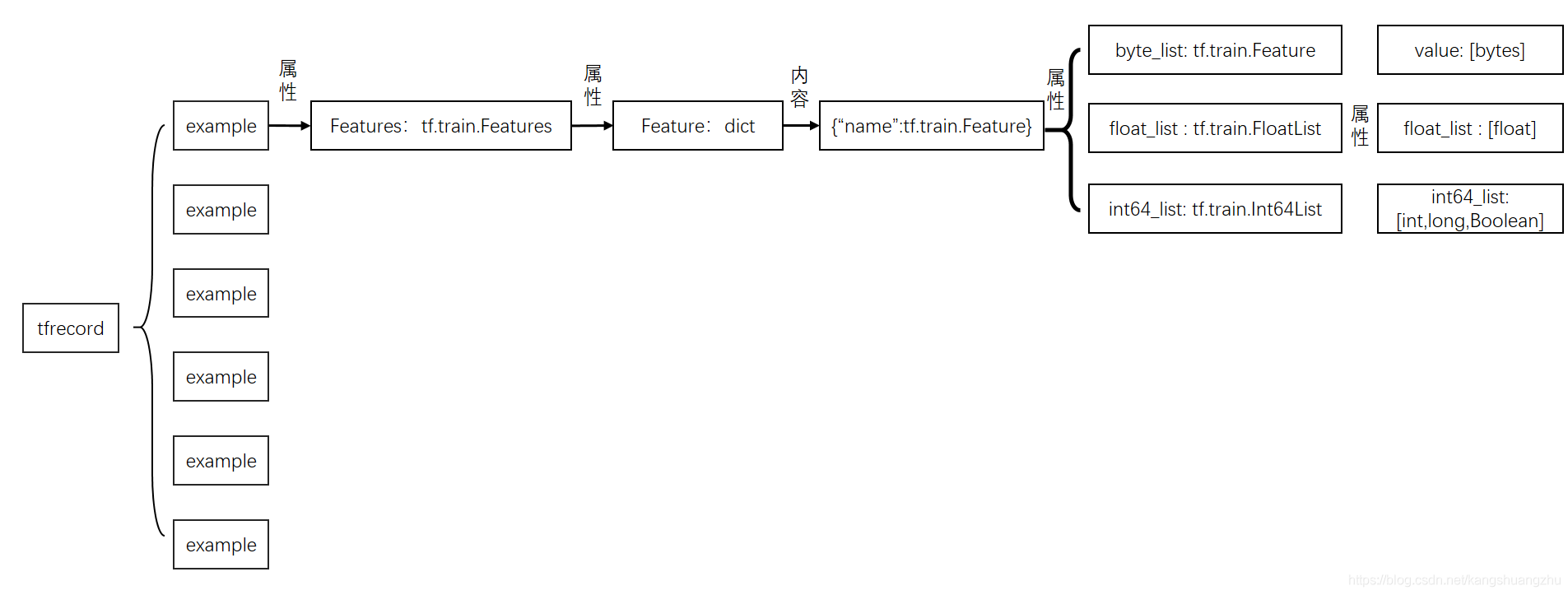
TFRecord TFRecord 是谷歌推荐的一种二进制文件格式,理论上它可以保存任何格式的信息。 tf.Example是一个Protobuffer定义的message,表达了一组string到bytes value的映射。TFRecord文件里面其实就是存储的序列化的tf.Example。关于Protobuffer参考Protobuf 终极教程。 example 我们可以具体到相关代码去详细地看下tf.Example的构成。作为一个Protobuffer message,它被定义在文件core/example/example.proto中: [代码] 只是包了一层Features的message。我们还需要进一步去查找Features的message定义: [代码] 到这里,我们可以看出...
Large Model
2026-01-11

UITARS 简介 UITARS(User Interface Task Automation and Reasoning System)是由字节跳动(ByteDance)研发的原生 GUI 智能体模型: 输入方式:仅使用屏幕截图作为视觉输入 交互方式:执行类人操作(键盘输入、鼠标点击、拖拽等) 模型特性:端到端的原生智能体模型,无需复杂的中间件或框架 传统 GUI 智能体的开发往往依赖于文本信息,例如 HTML 结构和可访问性树。虽然这些方法取得了一些进展,但它们也存在一些局限性: 平台不一致性:不同平台的 GUI 结构差异很大,导致智能体难以跨平台通用。 信息冗余:文本信息往往过于冗长,增加了模型的处理负担。 访问限制:获取系统底层的文本信息通常需要较高的权限,限制了应用的范围。 模块化...
Computer Vision
2026-01-11

Segment Anything Segment Anything(SA)项目:一个用于图像分割的新任务、新模型和新数据集 通过FM(基础模型)+prompt解决了CV中难度较大的分割任务,给计算机视觉实现基础模型+提示学习+指令学习提供了一种思路 关键:加大模型容量(构造海量的训练数据,或者构造合适的自监督任务来预训练) Segment Anything Task SAM的一部分灵感是来源于NLP中的基座模型(Foundation Model),Foundation Model是OpenAI提出的一个概念,它指的是在超大量数据集上预训练过的大模型(如GPT系列、BERT),这些模型具有非常强大的 zeroshot 和 fewshot能力,结合prompt engineering和fine ...
Computer Vision
2026-01-11
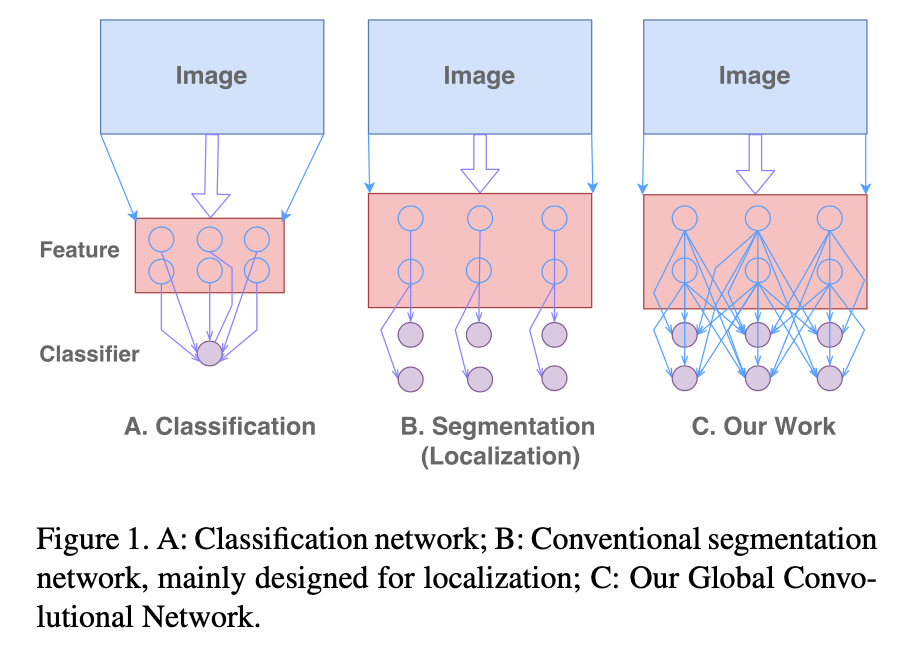
CVPR2017 算法 Global Convolutional Network(GCN),江湖人送外号“Large Kernel”。 Motivation GCN 主要将 Semantic Segmentation分解为:Classification 和 Localization两个问题。但是,这两个任务本质对特征的需求是矛盾的,Classification需要特征对多种Transformation具有不变性,而 Localization需要对 Transformation比较敏感。但是,普通的 Segmentation Model大多针对 Localization Issue设计,正如图(b)所示,而这不利于 Classification。 所以,为了兼顾这两个 Task,本文提出了两个...