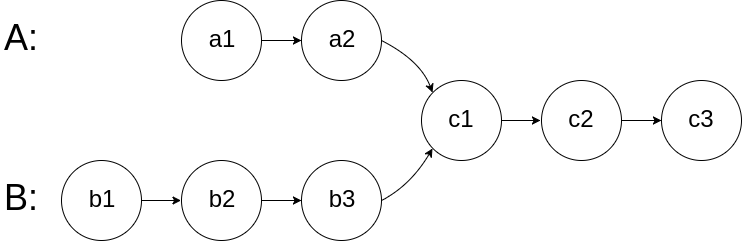
160. 相交链表 题目 给你两个单链表的头节点 headA 和 headB ,请你找出并返回两个单链表相交的起始节点。如果两个链表不存在相交节点,返回 null 。 图示两个链表在节点 c1 开始相交 : 题目数据 保证 整个链式结构中不存在环。 注意 ,函数返回结果后,链表必须 保持其原始结构 。 自定义评测: 评测系统 的输入如下(你设计的程序 不适用 此输入): intersectVal - 相交的起始节点的值。如果不存在相交节点,这一值为 0 listA - 第一个链表 listB - 第二个链表 skipA - 在 listA 中(从头节点开始)跳到交叉节点的节点数 skipB - 在 listB 中(从头节点开始)跳到交叉节点的节点数 评测系统将根据这些输入创建链式数据结构,并将两个头节点 headA 和 headB 传递给你的程序。如果程序能够正确返回相交节点,那么你的解决方案将被 视作正确答案 。 示例 1: 输入:intersectVal = 8, listA = [4,1,8,4,5], listB = [5,6,1,8,4,5], skipA = 2,...

48. 旋转图像 题目 给定一个 \(n × n\) 的二维矩阵 matrix 表示一个图像。请你将图像顺时针旋转 90 度。 你必须在 原地 旋转图像,这意味着你需要直接修改输入的二维矩阵。 请不要 使用另一个矩阵来旋转图像。 示例 1: 输入:matrix = [[1,2,3],[4,5,6],[7,8,9]]
输出:[[7,4,1],[8,5,2],[9,6,3]] 示例 2: 输入:matrix = [[5,1,9,11],[2,4,8,10],[13,3,6,7],[15,14,12,16]]
输出:[[15,13,2,5],[14,3,4,1],[12,6,8,9],[16,7,10,11]] 提示: n == matrix.length == matrix[i].length 1 <= n <= 20 -1000 <= matrix[i][j] <= 1000 题解 这是一个经典的矩阵操作问题。要在原地(In-place)将图像顺时针旋转 90 度,我们可以利用矩阵的几何性质。 最直观且易于实现的方法是将...
Deep Learning
2026-01-22

文章从连续情形出发开始介绍重参数,主要的例子是正态分布的重参数;然后引入离散分布的重参数,这就涉及到了Gumbel Softmax,包括Gumbel Softmax的一些证明和讨论;最后再讲讲重参数背后的一些故事,这主要跟梯度估计有关。 基本概念 重参数(Reparameterization) 实际上是处理如下期望形式的目标函数的一种技巧: \[L_{\theta}=\mathbb{E}_{z\sim p_{\theta}(z)}[f(z)]\tag{1}\] 这样的目标在VAE中会出现,在文本GAN也会出现,在强化学习中也会出现( \(f(z)\) 对应于奖励函数),所以深究下去,我们会经常碰到这样的目标函数。取决于 \(z\) 的连续性,它对应不同的形式: \[\int p_{\theta}(z) f(z)dz\,\,\,\text{(连续情形)}\qquad\qquad \sum_{z} p_{\theta}(z) f(z)\,\,\,\text{(离散情形)}\tag{2}\] 当然,离散情况下我们更喜欢将记号 \(z\) 换成 \(y\) 或者 \(c\) 。 为了最小化...
数组&链表&字符串 双指针 滑动窗口 哈希表 哈希表 栈&队列 单调队列 树与堆 图 数学 Math
Generative Model
2026-01-18

简介 如果以概率的视角看待世界的生成模型。 在这样的世界观中,我们可以将任何类型的观察数据(例如 \(D\) )视为来自底层分布(例如 \( p_{data}\) )的有限样本集。 任何生成模型的目标都是在访问数据集 \(D\) 的情况下近似该数据分布。 如果我们能够学习到一个好的生成模型,我们可以将学习到的模型用于下游推理。 我们主要对数据分布的参数近似感兴趣,在一组有限的参数中,它总结了关于数据集 \(D\) 的所有信息。 与非参数模型相比,参数模型在处理大型数据集时能够更有效地扩展,但受限于可以表示的分布族。 在参数的设置中,我们可以将学习生成模型的任务视为在模型分布族中挑选参数,以最小化模型分布和数据分布之间的距离。 如上图,给定一个狗的图像数据集,我们的目标是学习模型族 \(M\) 中生成模型 θ 的参数,使得模型分布 \(p_θ\) 接近 \(p_{data}\) 上的数据分布。 在数学上,我们可以将我们的目标指定为以下优化问题: \[\mathop{min}\limits_{\theta\in M}d(p_\theta,p_{data})\] 其中, \(d()\)...
Generative Model
2026-01-18

2022年中旬,以扩散模型为核心的图像生成模型将AI绘画带入了大众的视野。实际上,在更早的一年之前,就有了一个能根据文字生成高清图片的模型——VQGAN。VQGAN不仅本身具有强大的图像生成能力,更是传承了前作VQVAE把图像压缩成离散编码的思想,推广了「先压缩,再生成」的两阶段图像生成思路,启发了无数后续工作。 VQGAN 核心思想 VQGAN的论文名为 Taming Transformers for High-Resolution Image Synthesis,直译过来是「驯服Transformer模型以实现高清图像合成」。可以看出,该方法是在用Transformer生成图像。可是,为什么这个模型叫做VQGAN,是一个GAN呢?这是因为,VQGAN使用了两阶段的图像生成方法: 训练时,先训练一个图像压缩模型(包括编码器和解码器两个子模型),再训练一个生成压缩图像的模型。 生成时, 先用第二个模型生成出一个压缩图像,再用第一个模型复原成真实图像 。 其中,第一个图像压缩模型叫做VQGAN,第二个压缩图像生成模型是一个基于Transformer的模型。...
Generative Model
2026-01-18

分布变换 通常我们会拿VAE跟GAN比较,的确,它们两个的目标基本是一致的——希望构建一个从隐变量 \(Z\) 生成目标数据 \(X\) 的模型,但是实现上有所不同。更准确地讲,它们是假设了 \(Z\) 服从某些常见的分布(比如正态分布或均匀分布),然后希望训练一个模型 \(X=g(Z)\) ,这个模型能够将原来的概率分布映射到训练集的概率分布,也就是说,它们的目的都是进行分布之间的变换。 生成模型的难题就是判断生成分布与真实分布的相似度,因为我们只知道两者的采样结果,不知道它们的分布表达式 那现在假设 \(Z\) 服从标准的正态分布,那么我就可以从中采样得到若干个 \(Z_1, Z_2, \dots, Z_n\) ,然后对它做变换得到 \(\hat{X}_1 = g(Z_1),\hat{X}_2 = g(Z_2),\dots,\hat{X}_n = g(Z_n)\) ,我们怎么判断这个通过 \(g\)...
Computer Vision
2026-01-11

在正式介绍之前,先简单回顾一下现有的两大类方法。第一大类,也是从非Deep时代,乃至CV初期就被就被广泛使用的方法叫做image pyramid。在image pyramid中,我们直接对图像进行不同尺度的缩放,然后将这些图像直接输入到detector中去进行检测。虽然这样的方法十分简单,但其效果仍然是最佳,也后续启发了SNIP这一系列的工作。单论性能而言,multiscale training/testing仍然是一个不可缺少的组件。然而其缺点也是很明显的,测试时间大幅度提高,对于实际使用并不友好。 另外一大类方法,也是Deep方法所独有的,也就是feature pyramid。最具代表性的工作便是经典的FPN了。这一类方法的思想是直接在feature层面上来近似image pyramid...
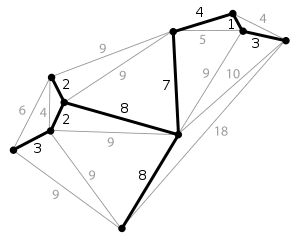
简介 生成树(spanning tree) 在图论中,无向图 G=(V,E) 的生成树(spanning tree)是具有G的全部顶点,但边数最少的联通子图。假设G中一共有n个顶点,一颗生成树满足下列条件: (1)n个顶点; (2)n1条边; (3)n个顶点联通; (4)一个图的生成树可能有多个。最小生成树(minimum spanning tree, MST)/最小生成森林:联通加权无向图中边缘权重加和最小的生成树。给定无向图 G=(V,E) , (u,v) 代表顶点 u 与顶点 v 的边, w(u,v) 代表此边的权重,若存在生成树T使得: [公式] 最小,则 T 为 G 的最小生成树。对于非连通无向图来说,它的每一连通分量同样有最小生成树,它们的并被称为最小生成森林。最小生成树除了继承...
Computer Vision
2026-01-11
在深度学习目标检测中,特别是人脸检测中,由于分辨率低、图像模糊、信息少、噪声多,小目标和小人脸的检测一直是一个实用和常见的难点问题。然而,在过去几年的发展中,也出现了一些提高小目标检测性能的解决方案。本文将对这些方法进行分析、整理和总结。 图像金字塔和多尺度滑动窗口检测 一开始,在深学习方法成为流行之前,对于不同尺度的目标,通常是从原始图像开始,使用不同的分辨率构建图像金字塔,然后使用分类器对金字塔的每一层进行滑动窗口的目标检测。 在著名的人脸检测器MTCNN中,使用图像金字塔法检测不同分辨率的人脸目标。然而,这种方法通常是缓慢的,虽然构建图像金字塔可以使用卷积核分离加速或简单粗暴地缩放,但仍需要做多个特征提取,后来有人借其想法想出一个特征金字塔网络FPN,在不同层融合特征,只需要一次正向计...
Computer Vision
2026-01-11

简介 "Anchorfree"(无锚点)是一种目标检测方法,与传统的使用锚框(anchor boxes)的方法(例如Faster RCNN)不同。在传统方法中,锚框是预先定义的、具有不同尺寸和长宽比的矩形区域,用于捕捉不同尺寸和形状的目标。而在"anchorfree"方法中,不再使用锚框,而是直接预测目标的位置和形状,通常使用网络输出的热图和偏移信息。 以下是对"anchorfree"方法的一些关键理解点: 无需预定义锚框: 在传统目标检测方法中,需要事先定义和生成一组锚框,这可能需要大量的人工工作。而在"anchorfree"方法中,不再需要锚框,模型可以自动学习目标的位置和形状。 直接位置和形状回归: "anchorfree"方法通过输出的热图来表示目标的存在概率,并使用偏移信息来定位目...
Computer Vision
2026-01-11

YOLO的核心思想就是利用整张图作为网络的输入,直接在输出层回归bounding box的位置和bounding box所属的类别。 faster RCNN中也直接用整张图作为输入,但是fasterRCNN整体还是采用了RCNN那种 proposal+classifier的思想,只不过是将提取proposal的步骤放在CNN中实现了,而YOLO则采用直接回归的思路。 YOLO v1 将一幅图像分成SxS个网格(grid cell),如果某个object的中心 落在这个网格中,则这个网格就负责预测这个object。 每个网格要预测B个bounding box,每个bounding box除了要回归自身的位置之外,还要附带预测一个confidence值。 这个confidence代表了所预测的b...