Self-Supervised
2026-04-02

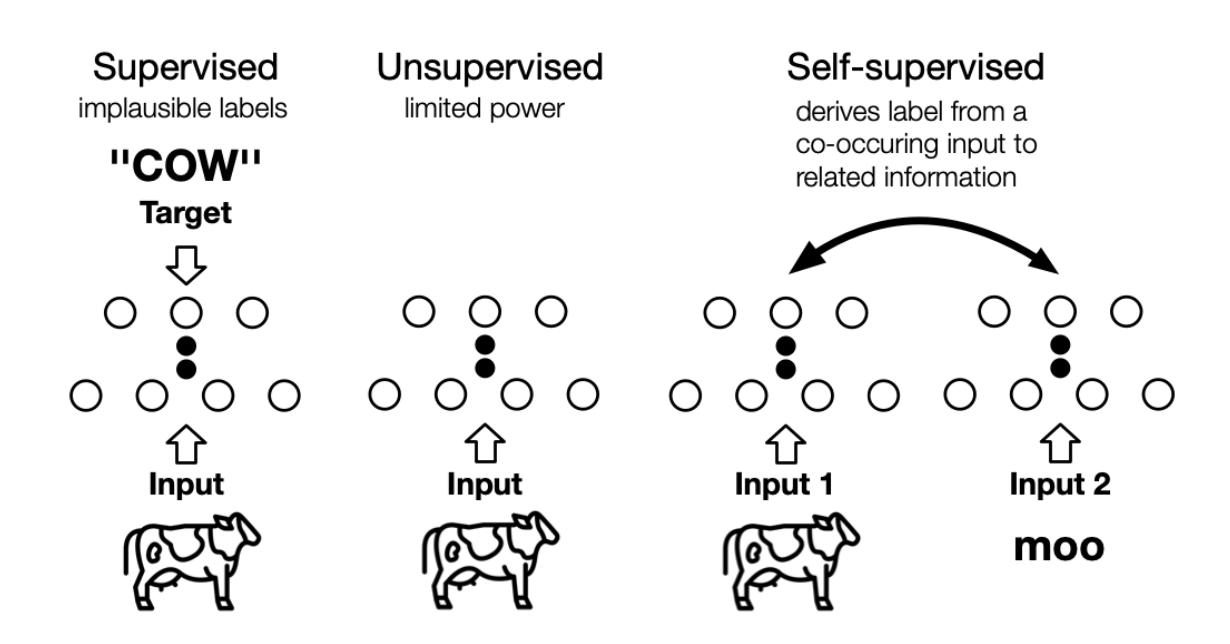
相关内容 自监督学习 (Self-supervised):属于无监督学习,其核心是自动为数据打标签(伪标签或其他角度的可信标签,包括图像的旋转、分块等等),通过让网络按照既定的规则,对数据打出正确的标签来更好地进行特征表示,从而应用于各种下游任务。 互信息 (Mutual Information):表示两个变量 \(X\) 和 \(Y\) 之间的关系,定义为: \[I(X;Y)=\sum_{x\in X}\sum_{y\in Y}p(x,y)log\frac{p(x|y)}{p(x)}\] 噪声对抗估计 (Noise Contrastive Estimation, NCE):在NLP任务中一种降低计算复杂度的方法,将语言模型估计问题简化为一个二分类问题。 Introduction 无监督学习一个重要的问题就是学习有用的 representation,本文的目的就是训练一个 representation learning 函数(即编码器encoder) ,其通过最大编码器输入和输出之间的互信息(MI)来学习对下游任务有用的 representation,而互信息可以通过 MINE...