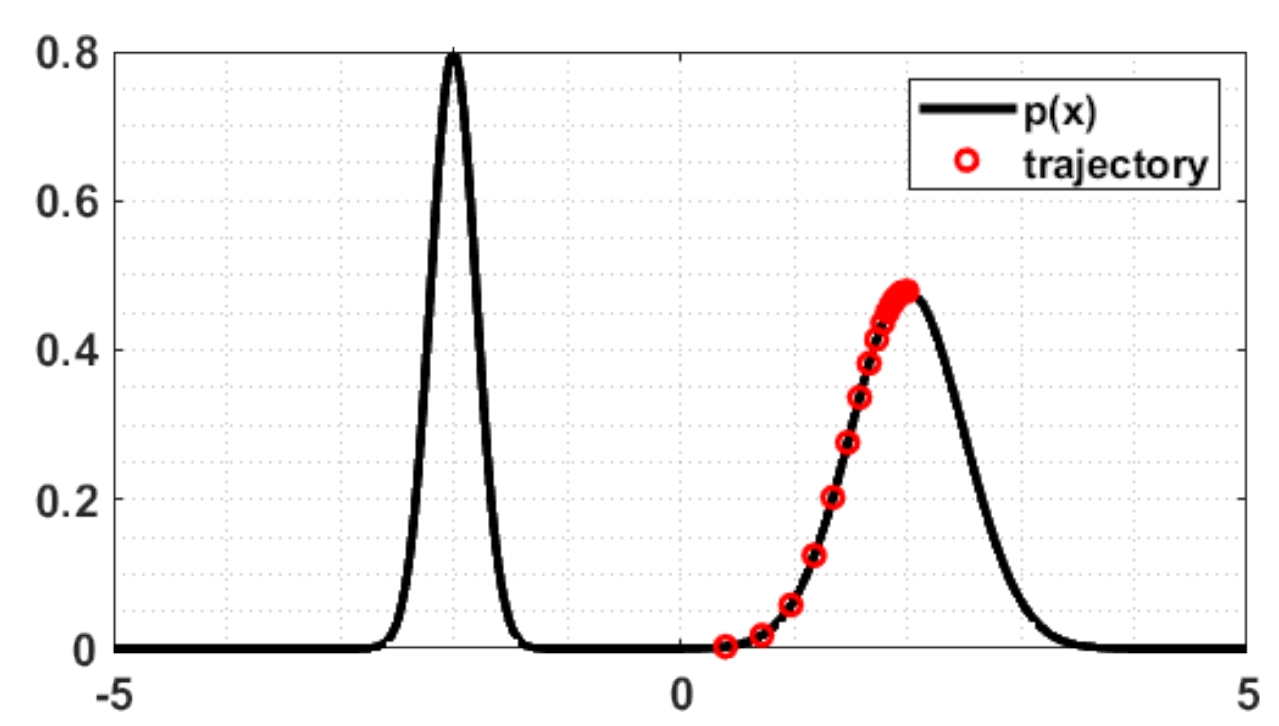
朗之万动力学(Langevin Dynamics)是扩散模型和score matching方法中的采样过程,是文本生成图像中的一个重要步骤。想要洞悉文生图的基本原理,朗之万动力学是绕不开的话题。 朗之万动力学原理简介 本文的主要内容是基于以下教程: Tutorial on Diffusion Models for Imaging and Vision 此教程写的非常好,非常推荐大家学习。教程的语言风格也很亲切,时不时地蹦出诸如“这是地球人能想出来的公式?”这样的话,为你枯燥的学习过程增添些许趣味。 朗之万动力学(Langevin Dynamics)是扩散模型和score matching方法中的采样过程,是文本生成图像中的一个重要步骤。想要洞悉文生图的基本原理,朗之万动力学是绕不开的话题。 给定一个已知的概率分布 \(p(x)\) ,我们的目标是采样出概率密度更大的那些样本。解决这个问题有多种方法,比如生成伪随机均匀分布,然后用概率分布变换的方法;或者用马尔可夫链蒙特卡洛方法(MCMC)。而朗之万动力学给出的方法是这样: 随机选取空间中一个点(这是很简单的,采用高斯生成与 \(x\)...
Large Model
2026-03-09
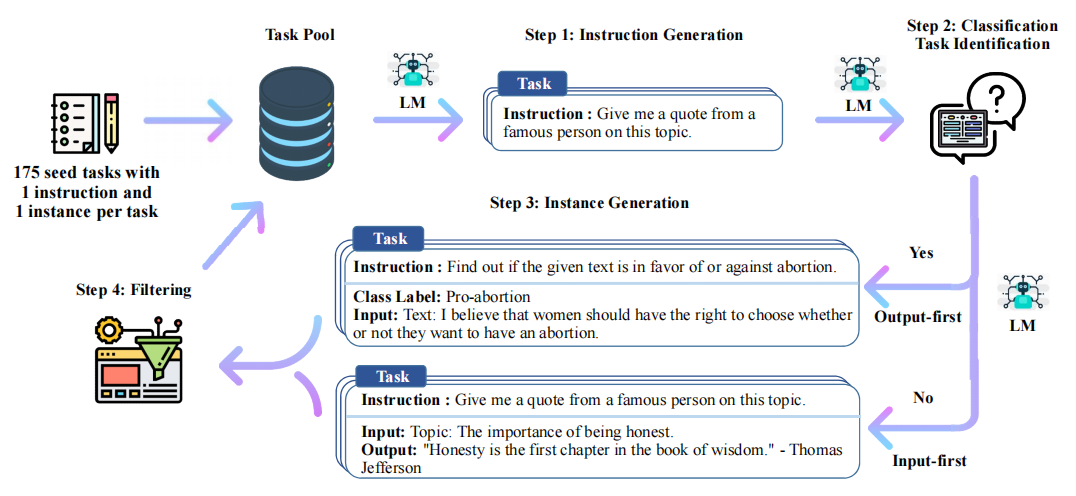
Stanford Alpaca 结合英文语料通过Self Instruct方式微调LLaMA 7B Stanford Alpaca简介 2023年3月中旬,斯坦福的Rohan Taori等人发布Alpaca(中文名:羊驼):号称只花100美元,人人都可微调Meta家70亿参数的LLaMA大模型(即LLaMA 7B), 具体做法是通过52k指令数据,然后在8个80GB A100上训练3个小时,使得Alpaca版的LLaMA 7B在单纯对话上的性能比肩GPT-3.5(text-davinci-003) ,这便是指令调优LLaMA的意义所在 论文《Alpaca: A Strong Open-Source Instruction-Following Model》 GitHub地址: https://github.com/tatsu-lab/stanford_alpaca 数据地址 (即斯坦福团队微调LLaMA 7B所用的52K英文指令数据): raw.githubusercontent.com/tatsu-lab/stanford_alpaca/main/alpaca_data.json...
Large Model
2026-03-06
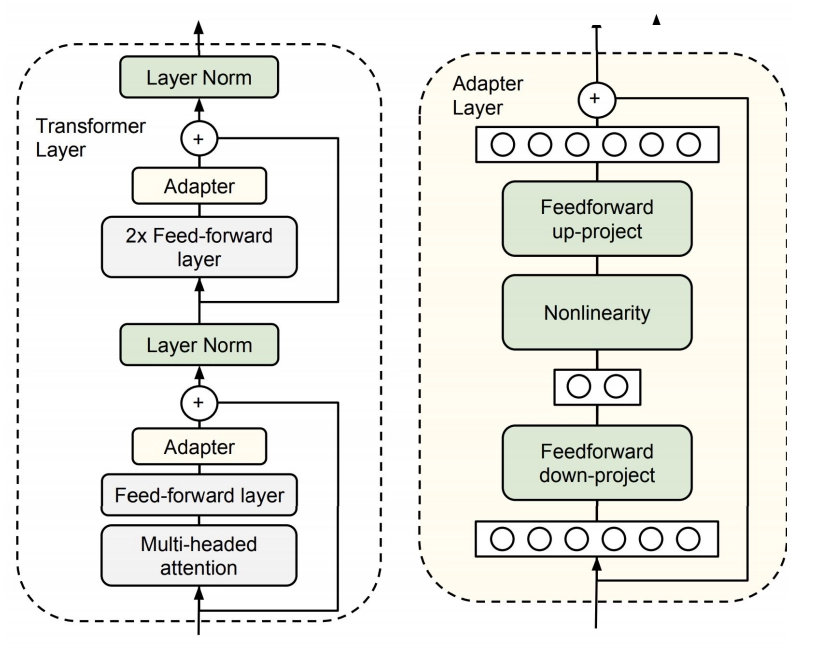
Adapter tuning Adapter Tuning试图在Transformer Layer的Self-Attetion+FFN之后插入一个先降维再升维的MLP(以及一层残差和LayerNormalization)来学习模型微调的知识。 在预训练模型每一层(或某些层)中添加Adapter模块(如上图左侧结构所示),微调时冻结预训练模型主体,由Adapter模块学习特定下游任务的知识。每个Adapter模块由两个前馈子层组成,第一个前馈子层将Transformer块的输出作为输入,将原始输入维度 \(d\) 投影到 \(m\) ,通过控制 \(m\) 的大小来限制Adapter模块的参数量,通常情况下 \(m\ll d\) 。在输出阶段,通过第二个前馈子层还原输入维度,将 \(m\) 重新投影到 \(d\)...
Deep Learning
2026-03-02

Random erasing data augmentation 论文名称:Random erasing data augmentation 论文地址: https://arxiv.org/pdf/1708.04896v2.pdf 随机擦除增强,非常容易理解。作者提出的目的主要是模拟遮挡,从而提高模型泛化能力,这种操作其实非常make sense,因为我把物体遮挡一部分后依然能够分类正确,那么肯定会迫使网络利用局部未遮挡的数据进行识别,加大了训练难度,一定程度会提高泛化能力。其也可以被视为add noise的一种,并且与随机裁剪、随机水平翻转具有一定的互补性,综合应用他们,可以取得更好的模型表现,尤其是对噪声和遮挡具有更好的鲁棒性。具体操作就是:随机选择一个区域,然后采用随机值进行覆盖,模拟遮挡场景。 在细节上,可以通过参数控制擦除的面积比例和宽高比,如果随机到指定数目还无法满足设置条件,则强制返回。 一些可视化效果如下: Cutout 论文名称:Improved Regularization of Convolutional Neural Networks with Cutout...
Deep Learning
2026-03-02
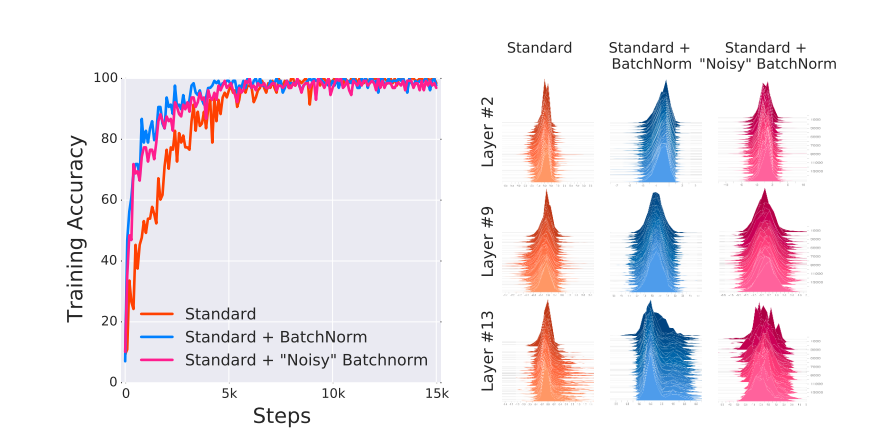
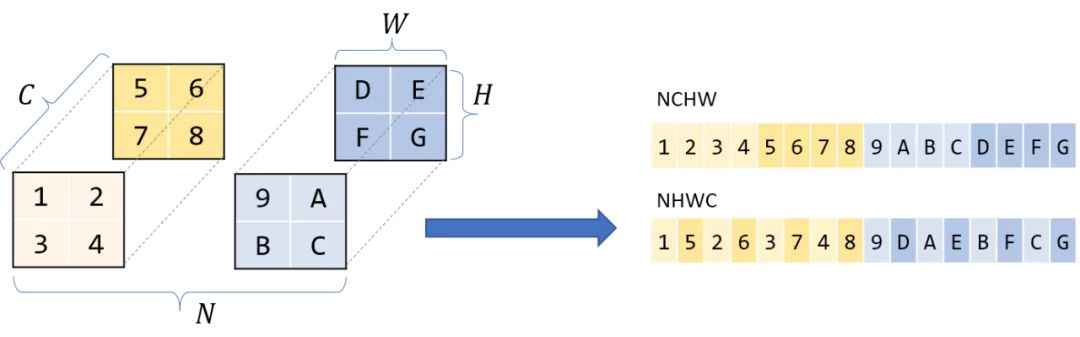
Batch Normalization 什么是批归一化(Batch Normalization) 以前在神经网络训练中,只是对输入层数据进行归一化处理,却没有在中间层进行归一化处理。要知道,虽然我们对输入数据进行了归一化处理,但是 输入数据经过 ** \(\sigma(WX+b)\) 这样的矩阵乘法以及非线性运算之后,其数据分布很可能被改变,而随着深度网络的多层运算之后,数据分布的变化将越来越大**。如果我们能在网络的中间也进行归一化处理,是否对网络的训练起到改进作用呢?答案是肯定的。 这种在神经网络中间层也进行归一化处理,使训练效果更好的方法,就是批归一化Batch Normalization(BN)。 其作用在整个mini-batch上,沿着 \(C\) 维度对 \(N,H,W\) 三个维度进行归一化。具体来说,就是把第1个样本的第1个通道,加上第2个样本第1个通道 ...... 加上第 \(N\) 个样本第1个通道,求平均,得到通道 1 的均值 (注意是除以 \(N×H×W\) 而不是单纯除以 \(N\) ,最后得到的是一个代表这个 batch...
Deep Learning
2026-03-02

通过卷积和池化等技术可以将图像进行降维,因此,一些研究人员也想办法恢复原分辨率大小的图像,特别是在语义分割领域应用很成熟。 Upsampling(上采样)[没有学习过程] 在FCN、U-net等网络结构中,涉及到了上采样。上采样概念: 上采样指的是任何可以让图像变成更高分辨率的技术 。最简单的方式是 重采样和插值 :将输入图片进行rescale到一个想要的尺寸,而且计算每个点的像素点,使用如双线性插值等插值方法对其余点进行插值来完成上采样过程。 在PyTorch中,上采样的层被封装在 torch.nn 中的 Vision Layers 里面,一共有4种: PixelShuffle Upsample UpsamplingNearest2d UpsamplingBilinear2d PixelShuffle 当stride = (1/r) < 1时,可以让卷积后的feature map变大——即分辨率变大,这个新的操作叫做sub-pixel convolution,具体原理可以看 “PixelShuffle:Real-Time Single Image and Video...
Deep Learning
2026-02-28
现代深度学习库对大多数操作都具有生产级的、高度优化的实现,这并不奇怪。但这些库究竟是什么魔法?他们如何能够将性能提高100倍?究竟怎样才能“优化”或加速神经网络的运行呢?在讨论高性能/高效DNNs时,我经常会问(也经常被问到)这些问题。 在这篇文章中,我将尝试带你了解在DNN库中卷积层是如何实现的。它不仅是在模型中最常见的和最重的操作,我还发现卷积高性能实现的技巧特别具有代表性——一点点算法的小聪明,非常多的仔细的调优和低层架构的开发。 我在这里介绍的很多内容都来自Goto等人的开创性论文:Anatomy of a high-performance matrix multiplication,该论文为OpenBLAS等线性代数库中使用的算法奠定了基础。 最原始的卷积实现 “过早的优化是万恶之源”——Donald Knuth 在进行优化之前,我们先了解一下基线和瓶颈。这是一个朴素的numpy/for循环卷积: '''
Convolve `input` with `kernel` to generate `output`
input.shape =...
Deep Learning
2026-02-27
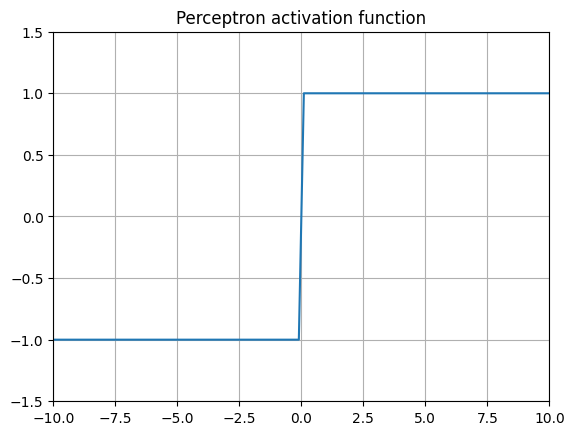
最近,似乎现在每个大型语言模型(LLM)和新闻中提到的复杂神经网络架构都使用略有不同的激活函数,而就在几年前,最常见的做法只是在神经网络的内部层中使用 ReLU。 曾经优秀的 ReLUs 怎么了,以及是什么促使最新的大型语言模型(LLMs)的创造者们开始使用不同的(更高级的)激活函数? Threshold activation (Perceptron) 1957 年,罗森布拉特建造了“感知机” 最古老的激活函数是基本感知器。它由芝加哥大学精神病学系的爱德华·麦克洛奇和沃尔特·皮茨构思,后来由弗兰克·罗森布拉特在 1957 年于康奈尔航空实验室为美国海军在硬件上更著名地实现了。该算法非常简单,其基本规则是:如果某个值超过某个阈值,则返回 1,否则返回 0。有些变体会返回 1 或-1。 由于其二元特性,除了某一点外,其导数为 0。这意味着权重无法通过反向传播等技术与网络提供的标签成比例地缩放。 多层感知器会简化为线性函数,使得它难以处理非线性可分的数据,比如这两个甜甜圈点云。 Sigmoid \[sigmoid(x) = \frac{1}{1 + e^{-x}}\] logistic...
Deep Learning
2026-02-27
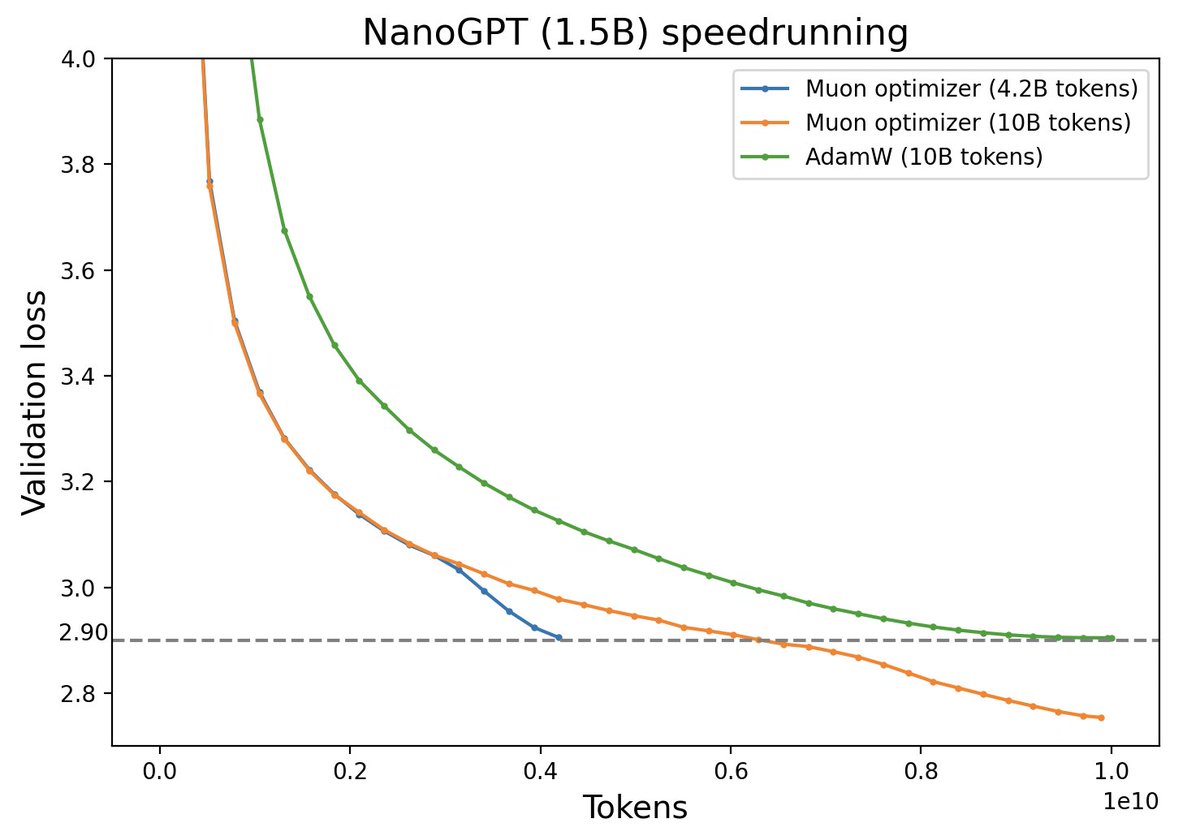
随着LLM时代的到来,学术界对于优化器的研究热情似乎有所减退。这主要是因为目前主流的AdamW已经能够满足大多数需求,而如果对优化器“大动干戈”,那么需要巨大的验证成本。因此,当前优化器的变化,多数都只是工业界根据自己的训练经验来对AdamW打的一些小补丁。 不过,最近推特上一个名为“Muon”的优化器颇为热闹,它声称比AdamW更为高效,且并不只是在Adam基础上的“小打小闹”,而是体现了关于向量与矩阵差异的一些值得深思的原理。本文让我们一起赏析一番。 算法初探 Muon全称是“MomentUm Orthogonalized by Newton-schulz”,它适用于矩阵参数 \(\boldsymbol{W}\in\mathbb{R}^{n\times m}\) ,其更新规则是 \[\begin{aligned}
\boldsymbol{M}_t =&\, \beta\boldsymbol{M}_{t-1} + \boldsymbol{G}_t \\[5pt]
\boldsymbol{W}_t =&\, \boldsymbol{W}_{t-1} - \eta_t...
Deep Learning
2026-02-27
一般来说,神经网络处理的东西都是连续的浮点数,标准的输出也是连续型的数字。但实际问题中,我们很多时候都需要一个离散的结果,比如分类问题中我们希望输出正确的类别,“类别”是离散的,“类别的概率”才是连续的;又比如我们很多任务的评测指标实际上都是离散的,比如分类问题的正确率和F1、机器翻译中的BLEU,等等。 还是以分类问题为例,常见的评测指标是正确率,而常见的损失函数是交叉熵。交叉熵的降低与正确率的提升确实会有一定的关联,但它们不是绝对的单调相关关系。换句话说,交叉熵下降了,正确率不一定上升。显然,如果能用正确率的相反数做损失函数,那是最理想的,但正确率是不可导的(涉及到 \(\text{argmax}\) 等操作),所以没法直接用。 这时候一般有两种解决方案;一是动用强化学习,将正确率设为奖励函数,这是“用牛刀杀鸡”的方案; 另外一种是试图给正确率找一个光滑可导的近似公式 。本文就来探讨一下常见的不可导函数的光滑近似,有时候我们称之为“光滑化”,有时候我们也称之为“软化”。 max 后面谈到的大部分内容,基础点就是max操作的光滑近似,我们有:...
Deep Learning
2026-02-27
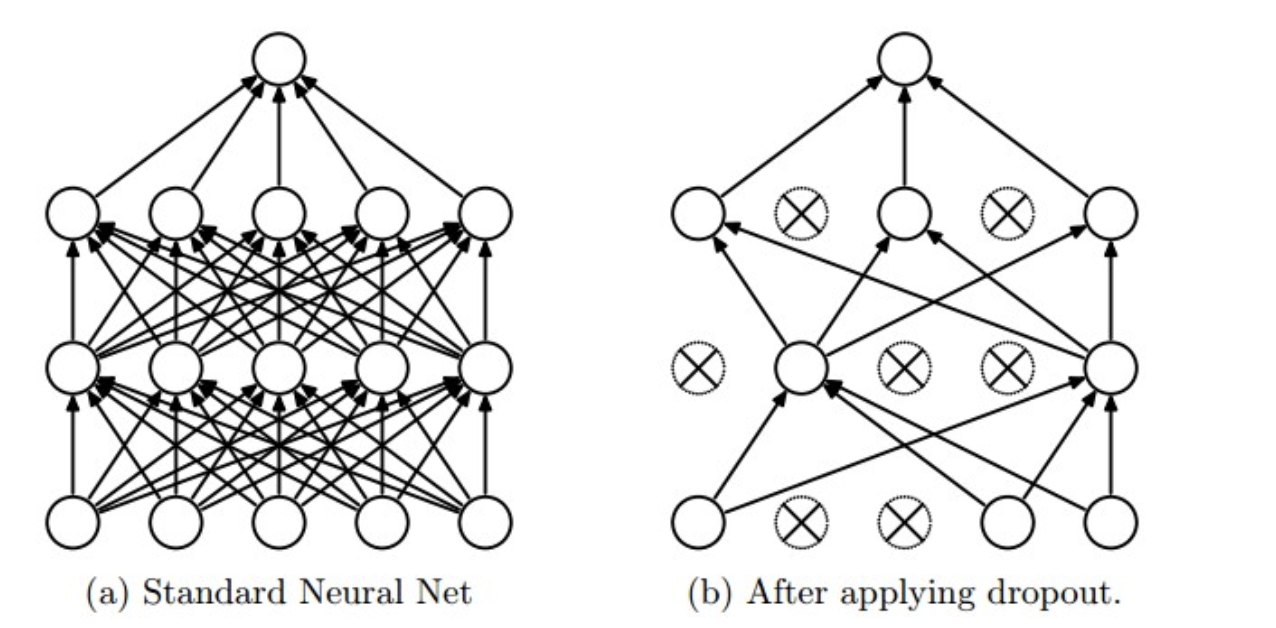
Dropout的运作方式 在神经网络的训练过程中,对于一次迭代中的某一层神经网络,先随机选择中的一些神经元并将其临时隐藏(丢弃),然后再进行本次训练和优化。在下一次迭代中,继续随机隐藏一些神经元,如此直至训练结束。由于是随机丢弃,故而每一个mini-batch都在训练不同的网络。 在训练时,每个神经单元以概率 \(𝑝\) 被保留(Dropout丢弃率为 \(1−𝑝\) );在预测阶段(测试阶段),每个神经单元都是存在的,权重参数 \(𝑤\) 要乘以 \(𝑝\) ,输出是: \(𝑝𝑤\) 。示意图如下: 预测阶段需要乘上 \(p\) 的原因: 前一层隐藏层的一个神经元在dropout之前的输出是 \(x\) ,训练时dropout之后的期望值是 \(E=px+0*(1−p)\) ; 在预测阶段该层神经元总是激活, 为了保持同样的输出期望值并使下一层也得到同样的结果 ,需要调整 \(x\rightarrow px\) . 其中 \(p\) 是Bernoulli分布(0-1分布)中值为1的概率。 Dropout 实现 如前文所述,在训练时随机隐藏部分神经元,在预测时必须要乘上p。代码如下:...
Deep Learning
2026-02-27
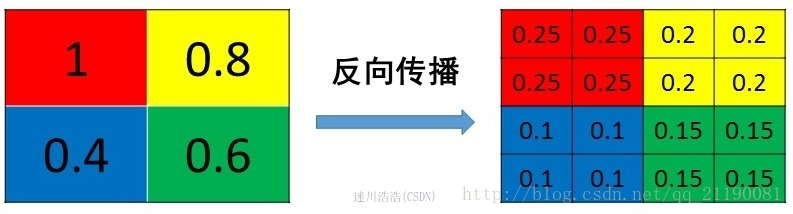
池化: 池化函数使用某一位置的相邻输出的总体统计特征来代替网络在该位置的输出。本质是 降采样,可以大幅减少网络的参数量 。 常用的池化有:均值池化(mean pooling)、最大池化(max pooling)。 pooling操作没有参数量!!! 下面来说说这两种池化的区别与作用: 均值池化 主要用来 抑制邻域值之间差别过大,造成的方差过大 。 如,输入(2,10),通过均值池化后是(6), 对于输入的整体信息保存的很好,在计算机视觉中:因为一般前景的值大于背景,并且背景较多,所以 对背景的保留效果好 反传 mean pooling的前向传播就是把一个patch中的值求取平均来做pooling,那么反向传播的过程也就是把某个元素的梯度等分为n份分配给前一层,这样就保证池化前后的梯度(残差)之和保持不变,还是比较理解的,图示如下 mean pooling比较容易让人理解错的地方就是会简单的认为直接把梯度复制N遍之后直接反向传播回去,但是这样会造成loss之和变为原来的N倍,网络是会产生梯度爆炸的。 最大池化 能够 抑制网络参数误差造成的估计均值偏移的现象 。...