76. 最小覆盖子串 题目 给定两个字符串 s 和 t ,长度分别是 m 和 n ,返回 s 中的 最短窗口 子串 ,使得该子串包含 t 中的每一个字符( 包括重复字符 )。如果没有这样的子串,返回空字符串 "" 。 测试用例保证答案唯一。 示例 1: 输入:s = "ADOBECODEBANC", t = "ABC"
输出:"BANC"
解释:最小覆盖子串 "BANC" 包含来自字符串 t 的 'A'、'B' 和 'C'。 示例 2: 输入:s = "a", t = "a"
输出:"a"
解释:整个字符串 s 是最小覆盖子串。 示例 3: 输入: s = "a", t = "aa"
输出: ""
解释: t 中两个字符 'a' 均应包含在 s 的子串中,
因此没有符合条件的子字符串,返回空字符串。 提示: m == s.length n == t.length 1 <= m, n <= 10 5 s 和 t 由英文字母组成 题解 这是一个经典的 滑动窗口 (Sliding Window) 问题 我们需要维护一个动态的窗口 [left, right] : 右移扩大 :不断移动...
Computer Vision
2026-01-11
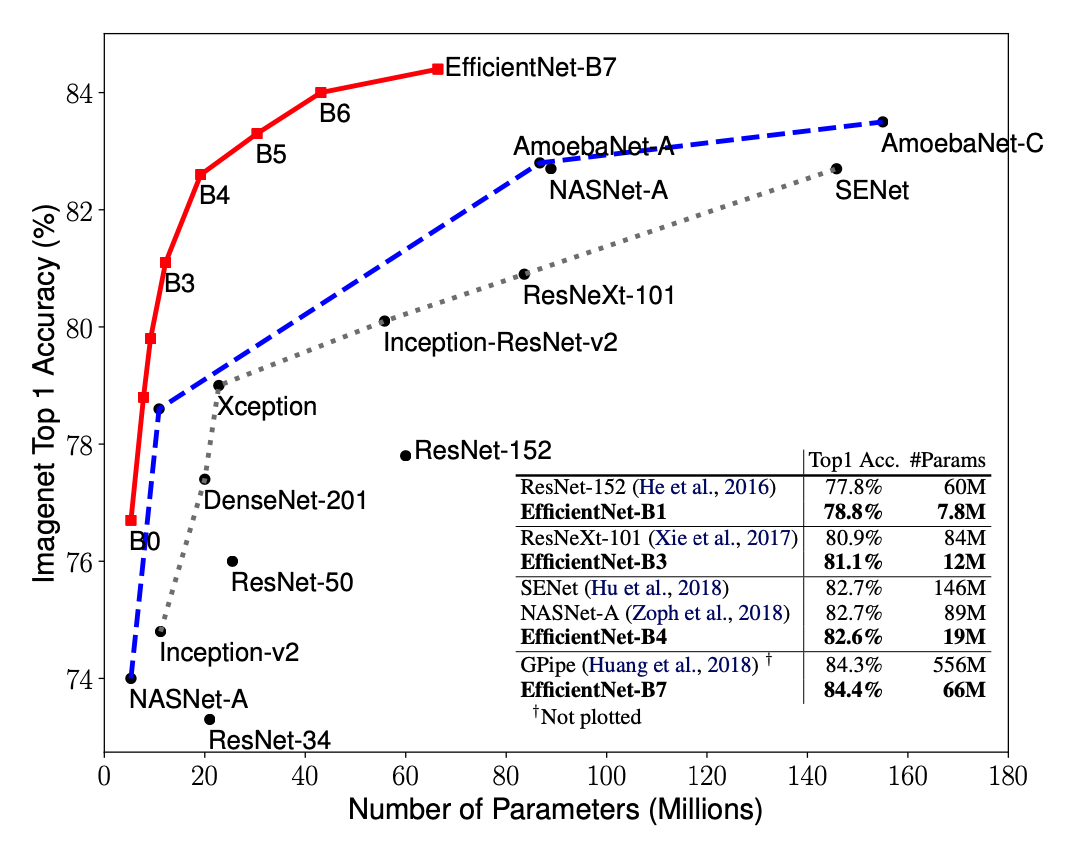
简介 EfficientNet源自Google Brain的论文EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks. 从标题也可以看出,这篇论文最主要的创新点是Model Scaling. 论文提出了compound scaling,混合缩放,把网络缩放的三种方式:深度、宽度、分辨率,组合起来按照一定规则缩放,从而提高网络的效果。EfficientNet在网络变大时效果提升明显,把精度上限进一步提升,成为了当前最强网络。EfficientNetB7在ImageNet上获得了最先进的 84.4%的top1精度 和 97.1%的top5精度,比之前最好的卷积网络(GPipe, Top1: 84.3%, ...
Computer Vision
2026-01-11

空洞卷积 Dilated/Atrous Convolution 或者是 Convolution with holes 从字面上就很好理解,是在标准的 convolution map 里注入空洞,以此来增加 reception field。相比原来的正常convolution,dilated convolution 多了一个 hyperparameter 称之为 dilation rate 指的是kernel的间隔数量(e.g. 正常的 convolution 是 dilatation rate 1)。 一个简单的例子 一维情况下空洞卷积的公式如下 [Formula] 不过光理解他的工作原理还是...
Computer Vision
2026-01-11
PA Pixel Accuracy(PA,像素精度):这是最简单的度量,为标记正确的像素占总像素的比例。 [公式] 图像中共有k+1(包含背景)类, p_{ii} 表示将第i类分成第 i 类的像素数量(正确分类的像素数量), p_{ij} 表示将第 i 类分成第 j 类的像素数量(所有像素数量) 因此该比值表示正确分类的像素数量占总像素数量的比例。 优点:简单 缺点:如果图像中大面积是背景,而目标较小,即使将整个图片预测为背景,也会有很高的PA得分,因此该指标不适用于评价以小目标为主的图像分割效果。 MPA Mean Pixel Accuracy(MPA,均像素精度):是PA的一种简单提升,计算每个类内被正确分类像素数的比例,之后求所有类的平均。 [公式] MIoU Mean Interse...
Computer Vision
2026-01-11

💡 轻量级网络系列 Introduction Inception 在最初的版本 Inception/GoogleNet,其核心思想是利用多尺寸卷积核去观察输入数据。举个栗子,我们看某个景象由于远近不同,同一个物体的大小也会有所不同,那么不同尺度的卷积核观察的特征就会有这样的效果。于是就有了如下的网络结构图: 于是我们的网络就变胖了,通过增加网络的宽度,提高了对于不同尺度的适应程度。但这样的话,计算量有点大了。 Pointwise Conv 为了减少在上面结构的参数量并降低计算量,于是在 Inception V1 的基础版本上加上了 1x1 卷积核,这就形成了 Inception V1 的最终网络结构,如下图。 这个 1x1 卷积就是 Pointwise Convolution,简称 PW。利...
Computer Vision
2026-01-11

网络整体介绍 ThunderNet的整体架构如下图所示。 ThunderNet使用320×320像素作为网络的输入分辨率。整体的网络结构分为两部分:Backbone部分和Detection部分。网络的骨干部分为SNet,SNet是基于ShuffleNetV2进行修改得到的。 网络的检测部分,利用了压缩的RPN网络,修改自LightHead RCNN网络用以提高效率。 并提出Context Enhancement Module整合局部和全局特征增强网络特征表达能力。 并提出Spatial Attention Module空间注意模块,引入来自RPN的前后景信息用以优化特征分布。 backbone 部分 1.输入分辨率 为了加快推理(前向操作)速度,作者使用320320大小的输入图像。需要注意的...
Computer Vision
2026-01-11

Segment Anything Segment Anything(SA)项目:一个用于图像分割的新任务、新模型和新数据集 通过FM(基础模型)+prompt解决了CV中难度较大的分割任务,给计算机视觉实现基础模型+提示学习+指令学习提供了一种思路 关键:加大模型容量(构造海量的训练数据,或者构造合适的自监督任务来预训练) Segment Anything Task SAM的一部分灵感是来源于NLP中的基座模型(Foundation Model),Foundation Model是OpenAI提出的一个概念,它指的是在超大量数据集上预训练过的大模型(如GPT系列、BERT),这些模型具有非常强大的 zeroshot 和 fewshot能力,结合prompt engineering和fine ...
Computer Vision
2026-01-11
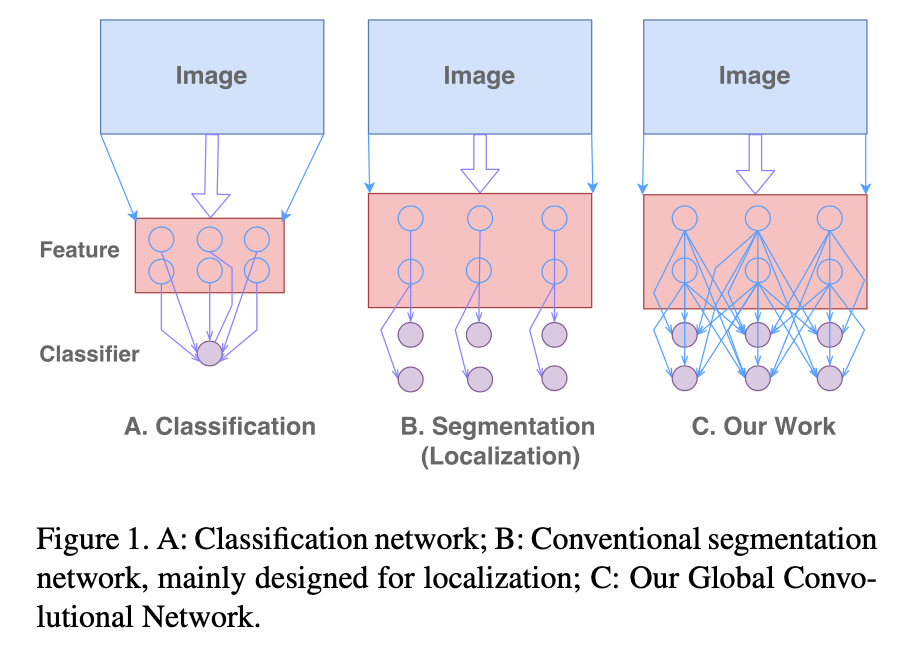
CVPR2017 算法 Global Convolutional Network(GCN),江湖人送外号“Large Kernel”。 Motivation GCN 主要将 Semantic Segmentation分解为:Classification 和 Localization两个问题。但是,这两个任务本质对特征的需求是矛盾的,Classification需要特征对多种Transformation具有不变性,而 Localization需要对 Transformation比较敏感。但是,普通的 Segmentation Model大多针对 Localization Issue设计,正如图(b)所示,而这不利于 Classification。 所以,为了兼顾这两个 Task,本文提出了两个...