
11. 盛最多水的容器 题目 给定一个长度为 n 的整数数组 height 。有 n 条垂线,第 i 条线的两个端点是 (i, 0) 和 (i, height[i]) 。 找出其中的两条线,使得它们与 x 轴共同构成的容器可以容纳最多的水。 返回容器可以储存的最大水量。 说明: 你不能倾斜容器。 示例 1: 输入:[1,8,6,2,5,4,8,3,7]
输出:49
解释:图中垂直线代表输入数组 [1,8,6,2,5,4,8,3,7]。在此情况下,容器能够容纳水(表示为蓝色部分)的最大值为 49。 示例 2: 输入:height = [1,1]
输出:1 提示: n == height.length 2 <= n <= 10 5 0 <= height[i] <= 10 4 题解 在初始时,左右指针分别指向数组的左右两端,它们可以容纳的水量为 \(min(1,7)∗8=8\) 。 此时我们需要移动一个指针。移动哪一个呢?直觉告诉我们,应该移动对应数字较小的那个指针(即此时的左指针)。这是因为,由于容纳的水量是由 两个指针指向的数字中较小值∗指针之间的距离...
Deep Learning
2026-01-22

文章从连续情形出发开始介绍重参数,主要的例子是正态分布的重参数;然后引入离散分布的重参数,这就涉及到了Gumbel Softmax,包括Gumbel Softmax的一些证明和讨论;最后再讲讲重参数背后的一些故事,这主要跟梯度估计有关。 基本概念 重参数(Reparameterization) 实际上是处理如下期望形式的目标函数的一种技巧: \[L_{\theta}=\mathbb{E}_{z\sim p_{\theta}(z)}[f(z)]\tag{1}\] 这样的目标在VAE中会出现,在文本GAN也会出现,在强化学习中也会出现( \(f(z)\) 对应于奖励函数),所以深究下去,我们会经常碰到这样的目标函数。取决于 \(z\) 的连续性,它对应不同的形式: \[\int p_{\theta}(z) f(z)dz\,\,\,\text{(连续情形)}\qquad\qquad \sum_{z} p_{\theta}(z) f(z)\,\,\,\text{(离散情形)}\tag{2}\] 当然,离散情况下我们更喜欢将记号 \(z\) 换成 \(y\) 或者 \(c\) 。 为了最小化...
Generative Model
2026-01-19
基于文章 《Elucidating the Design Space of Diffusion-Based Generative Models》 来统一扩散模型框架 通用扩散模型框架推导 加噪公式 Flow Matching的一步加噪公式 \[\mathbf{x}_t=(1-t)\mathbf{x}_0+t\varepsilon\] 写成概率分布形式: \[p(\mathbf{x}_t|\mathbf{x}_0)=\mathcal{N}(\mathbf{x}_t;(1-t)\mathbf{x}_0,t^2\mathbf{I})\] Score Matching的一步加噪公式 \[\mathbf{x}_t=\mathbf{x}_0+\sigma_t\varepsilon \] 写成概率分布形式: \[p(\mathbf{x}_t|\mathbf{x}_0)=\mathcal{N}(\mathbf{x}_t;\mathbf{x}_0,\sigma_t^2\mathbf{I})\] DDPM/DDIM的一步加噪公式...
Deep Learning
2026-01-11
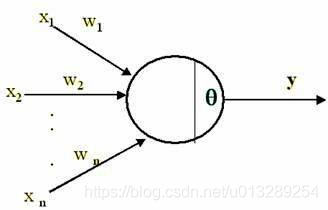
1.深度学习偏置的作用? 我们在学深度学习的时候,最早接触到的神经网络应该属于感知器(感知器本身就是一个很简单的神经网络,也许有人认为它不属于神经网络,当然认为它和神经网络长得像也行) 要想激活这个感知器,使得 y=1 ,就必须使 x_1w_1 + x_2w_2 +....+x_nw_n T ( T 为一个阈值),而 T 越大,想激活这个感知器的难度越大,人工选择一个阈值并不是一个好的方法,因为样本那么多,我不可能手动选择一个阈值,使得模型整体表现最佳,那么我们可以使得T变成可学习的,这样一来, T 会自动学习到一个数,使得模型的整体表现最佳。当把T移动到左边,它就成了偏置, x_1w_1 + x_2w_2 +....+x_nw_n T 0 xw +b 0 ,总之,偏置的大小控制着激活这个感...
Deep Learning
2026-01-11
一般来说,神经网络处理的东西都是连续的浮点数,标准的输出也是连续型的数字。但实际问题中,我们很多时候都需要一个离散的结果,比如分类问题中我们希望输出正确的类别,“类别”是离散的,“类别的概率”才是连续的;又比如我们很多任务的评测指标实际上都是离散的,比如分类问题的正确率和F1、机器翻译中的BLEU,等等。 还是以分类问题为例,常见的评测指标是正确率,而常见的损失函数是交叉熵。交叉熵的降低与正确率的提升确实会有一定的关联,但它们不是绝对的单调相关关系。换句话说,交叉熵下降了,正确率不一定上升。显然,如果能用正确率的相反数做损失函数,那是最理想的,但正确率是不可导的(涉及到 [Math] 等操作),所以没法直接用。 这时候一般有两种解决方案;一是动用强化学习,将正确率设为奖励函数,这是“用牛刀杀...
Deep Learning
2026-01-11
如何计算RF 公式一:这个算法从top往下层层迭代直到追溯回input image,从而计算出RF。 [公式] 其中,RF是感受野。RF和RF有点像,N代表 neighbour,指的是第n层的 a feature在n1层的RF,记住N_RF只是一个中间变量,不要和RF混淆。 stride是步长,ksize是卷积核大小。
Generative Model
2026-01-11

Diffusion Models from SDE 连续扩散模型 (Continuous Diffusion Models) 将传统的离散时间扩散过程扩展到连续时间域,可以被视为一个随机过程,使用随机微分方程(SDE)来描述。其前向过程可以写成如下形式: [公式] 其中, f(x,t) 可以看成偏移系数, g(t) 可以看成是扩散系数, dw 是标准布朗运动。这个SDE 描述了数据在连续时间域内如何被噪声逐渐破坏。 这个随机过程的逆向过程存在(更准确的描述:下面的逆向时间SDE具有与正向过程SDE相同的联合分布)为 [公式] 前面我们得到了扩散过程的逆向过程可以用一个SDE描述(逆向随机过程),事实上,存在一个确定性过程 (用ODE描述)也是它的逆向过程 (更准确的描述:这个ODE过程的在任...
Deep Learning
2026-01-11
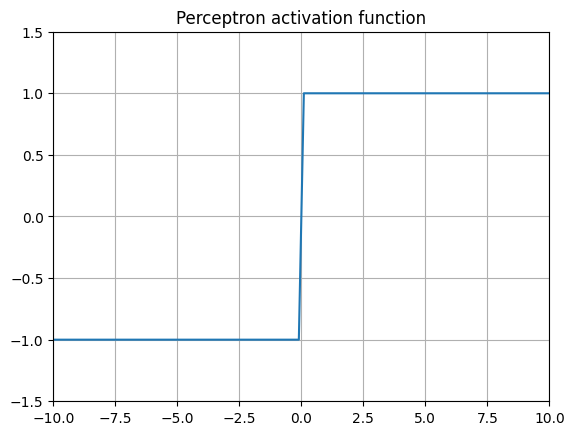
最近,似乎现在每个大型语言模型(LLM)和新闻中提到的复杂神经网络架构都使用略有不同的激活函数,而就在几年前,最常见的做法只是在神经网络的内部层中使用 ReLU。 曾经优秀的 ReLUs 怎么了,以及是什么促使最新的大型语言模型(LLMs)的创造者们开始使用不同的(更高级的)激活函数? Threshold activation (Perceptron) 1957 年,罗森布拉特建造了“感知机” 最古老的激活函数是基本感知器。它由芝加哥大学精神病学系的爱德华·麦克洛奇和沃尔特·皮茨构思,后来由弗兰克·罗森布拉特在 1957 年于康奈尔航空实验室为美国海军在硬件上更著名地实现了。该算法非常简单,其基本规则是:如果某个值超过某个阈值,则返回 1,否则返回 0。有些变体会返回 1 或1。 由于其二元...
Deep Learning
2026-01-11

引言与背景 随机逼近(Stochastic Approximation)是一类用于求解寻根或优化问题的随机迭代算法,其特点是不需要知道目标函数或其导数的表达式。 随机逼近的核心优势在于: 能够处理带有随机噪声的观测数据 不需要目标函数的解析表达式 可以在线学习,每获得一个新样本就更新估计值 均值估计问题 考虑一个随机变量 X ,其取值来自有限集合 [Math] 。我们的目标是估计 E[X] 。假设我们有一个独立同分布的样本序列 \{x_i\}_{i=1}^n ,那么 X 的期望值可以近似为: [公式] 非增量方法与增量方法 非增量方法:先收集所有样本,然后计算平均值。缺点是如果样本数量很大,可能需要等待很长时间。 增量方法:定义 [公式] 可以推导出递归公式: [公式] 这个算法可以增量式地...
Deep Learning
2026-01-11

通过卷积和池化等技术可以将图像进行降维,因此,一些研究人员也想办法恢复原分辨率大小的图像,特别是在语义分割领域应用很成熟。 1、Upsampling(上采样)[没有学习过程] 在FCN、Unet等网络结构中,涉及到了上采样。上采样概念:上采样指的是任何可以让图像变成更高分辨率的技术。最简单的方式是重采样和插值:将输入图片进行rescale到一个想要的尺寸,而且计算每个点的像素点,使用如双线性插值等插值方法对其余点进行插值来完成上采样过程。 在PyTorch中,上采样的层被封装在torch.nn中的Vision Layers里面,一共有4种: PixelShuffle Upsample UpsamplingNearest2d UpsamplingBilinear2d 0)PixelShuffl...
Generative Model
2026-01-11

💡 Score based generative model SMLD的关键点: 正式开始介绍之前首先解答一下这个问题:scorebased 模型是什么东西,微分方程在这个模型里到底有什么用?我们知道生成模型基本都是从某个现有的分布中进行采样得到生成的样本,为此模型需要完成对分布的建模。根据建模方式的不同可以分为隐式建模(例如 GAN、diffusion models)和显式建模(例如 VAE、normalizing flows)。和上述的模型相同,scorebased 模型也是用一定方式对分布进行了建模。具体而言,这类模型建模的对象是概率分布函数 log 的梯度,也就是 score function,而为了对这个建模对象进行学习,需要使用一种叫做 score matching 的技术,这也...
Generative Model
2026-01-11

💡 随机微分 在DDPM中,扩散过程被划分为了固定的T步,还是用DDPM中的类比来说,就是“拆楼”和“建楼”都被事先划分为了T步,这个划分有着相当大的人为性。事实上,真实的“拆”、“建”过程应该是没有刻意划分的步骤的,我们可以将它们理解为一个在时间上连续的变换过程,可以用随机微分方程(Stochastic Differential Equation,SDE)来描述。 为此,我们用下述SDE描述前向过程(“拆楼”): [公式] 相信很多读者都对SDE很陌生,笔者也只是在硕士阶段刚好接触过一段时间,略懂皮毛。不过不懂不要紧,我们只需要将它看成是下述离散形式在 [Math] 时的极限: [公式] 再直白一点,如果假设拆楼需要1天,那么拆楼就是 [Math] 从 t=0 到 t=1 的变化过程,每一...