Reinforcement Learning
2026-03-30
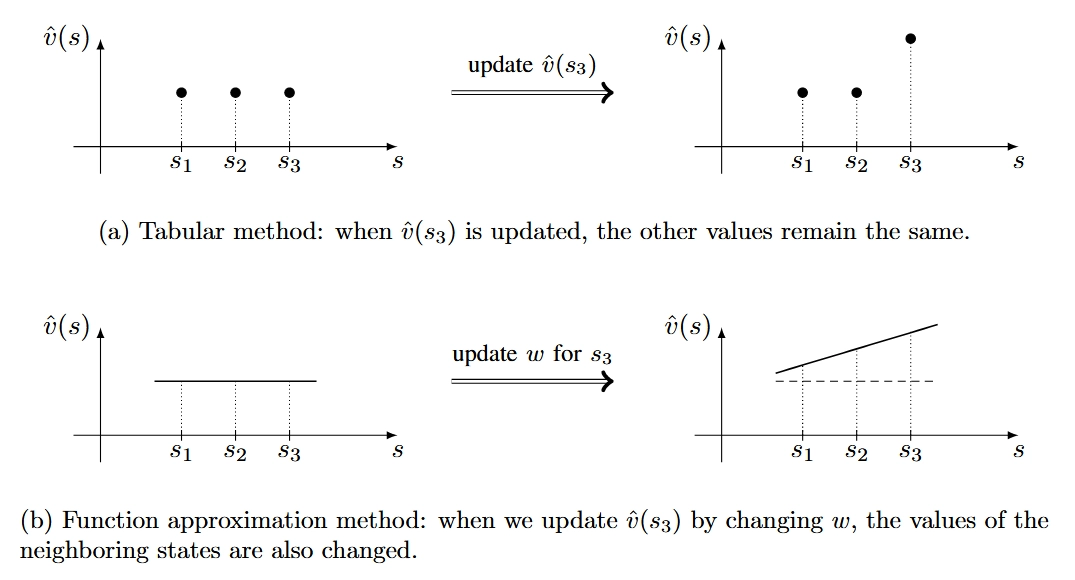
引言与背景 价值函数方法是强化学习中的核心技术,它解决了传统表格方法在处理大型状态或动作空间时的效率问题。本文探讨了从表格表示向函数表示的转变,这是强化学习算法发展的重要里程碑。 在强化学习的发展路径中,价值函数方法位于从基于模型到无模型、从表格表示到函数表示的演进过程中。它结合了时序差分学习的思想,并通过函数近似技术来处理复杂环境。 价值表示:从表格到函数 表格与函数表示的对比 传统的表格方法将状态值存储在一个表格中: 状态 \(s_1\) \(s_2\) \(\cdots\) \(s_n\) 估计值 \(\hat{v}(s_1)\) \(\hat{v}(s_2)\) \(\cdots\) \(\hat{v}(s_n)\) 而函数近似方法则使用参数化函数来表示这些值,例如: \[\hat{v}(s, w) = as + b = [s, 1] \begin{bmatrix} a \\ b \end{bmatrix} = \phi^T(s)w\] 其中 \(\phi(s)\in\mathbb{R}^2\) 称作是状态 \(s\) 的特征向量, \(w\) 是参数向量。...