
💡 GRPO相比PPO主要优势: 1. 训练更稳定 引入 KL 散度惩罚项,有效控制策略更新的幅度,避免策略崩溃,提高训练的稳定性 GRPO用组内相对优势替代value model,消除了value估计误差 通过组内归一化,自动消除reward scale和bias的影响 实验中发现GRPO的advantage方差比PPO小30%左右,训练崩溃率更低 2. 工程更简单 只需要1-2个模型(policy + reference),而PPO需要4个 显存占用减少50%以上,训练速度提升2-3倍 超参数更少,更容易调优 3. 相对奖励机制 通过对同一输入生成的多个输出进行比较,GRPO 能够更稳定地估计优势函数,减少了训练过程中的方差 背景 GRPO是 DeepSeek-Math model中提出的对PPO方法的改进策略: 强化学习(RL)在提升模型数学推理能力方面被证明是有效的 传统PPO算法需要较大训练资源 GRPO作为PPO的变体被提出,可以更高效地优化模型 PPO Vs GRPO PPO回顾 PPO的目标函数为: \[\begin{aligned}J_{PPO}(\theta) =...
NLP
2026-03-26

这篇文章主要去“复盘”一下主流的长度外推结果,并试图从中发现免训练长度外推的关键之处。 问题定义 顾名思义,免训练长度外推,就是不需要用长序列数据进行额外的训练,只用短序列语料对模型进行训练,就可以得到一个能够处理和预测长序列的模型,即“Train Short, Test Long”。那么如何判断一个模型能否用于长序列呢?最基本的指标就是模型的长序列Loss或者PPL不会爆炸,更加符合实践的评测则是输入足够长的Context,让模型去预测答案,然后跟真实答案做对比,算BLEU、ROUGE等, LongBench 就是就属于这类榜单。 但要注意的是,长度外推应当不以牺牲远程依赖为代价——否则考虑长度外推就没有意义了,倒不如直接截断文本——这意味着通过显式地截断远程依赖的方案都需要谨慎选择,比如ALIBI,还有带显式Decay的 线性RNN ,这些方案当序列长度足够大时都表现为局部注意力,即便有可能实现长度外推,也会有远程依赖不足的风险,需要根据自己的场景斟酌使用。 如何判断在长度外推的同时有没有损失远程依赖呢?比较严谨的是像 ReRoPE...
Large Model
2026-03-18
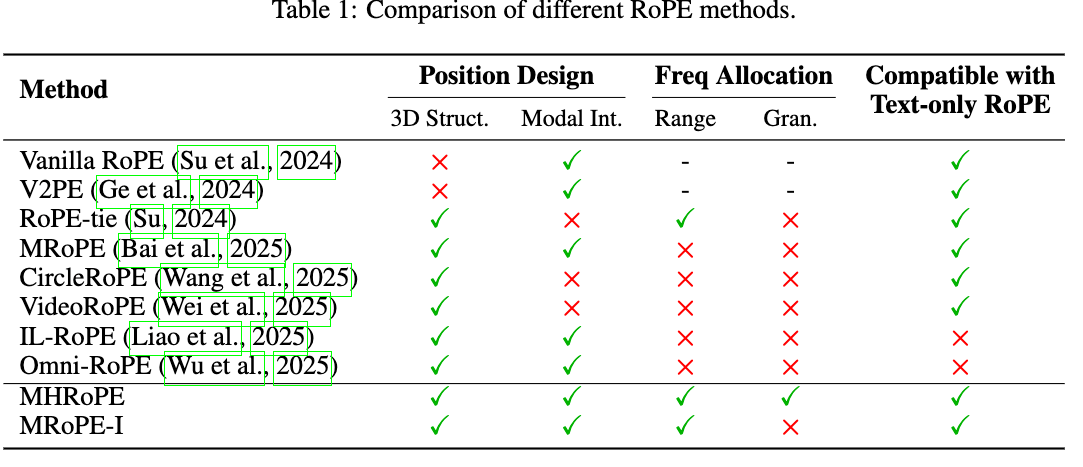
简介 论文: 《REVISITING MULTIMODAL POSITIONAL ENCODING IN VISION–LANGUAGE MODELS》 通过对多模态旋转位置嵌入(RoPE)的两个核心组件——位置设计和频率分配进行综合分析。通过实验,确定了三个关键指南:位置一致性、频率全利用和保留文本先验。基于这些见解,提出了多头RoPE(MHRoPE)和MRoPE-Interleave(MRoPE-I),这两种简单且即插即用的变体不需要任何架构更改。 为了构建更稳健的多模态位置编码,作者在MRoPE的基础上,系统地探索了三个未充分研究的方案: 位置设计——如何为文本和视觉标记分配无歧义、分离良好的坐标; 频率分配——如何将旋转频率分配到每个位置轴的嵌入维度; 与纯文本RoPE的兼容性——确保设计默认为标准RoPE,以便进行有效的迁移学习。 Vanilla RoPE RoPE与加性位置嵌入不同,RoPE对query和key向量应用旋转变换,从而将相对位置依赖直接纳入自注意力机制。给定位置 \(m\) 的查询向量 \(q\) 和位置 \(n\) 的键向量 \(k\) ,注意力分数...
NLP
2026-03-16
不同于RNN、CNN等模型,对于Transformer模型来说,位置编码的加入是必不可少的,因为纯粹的Attention模块是无法捕捉输入顺序的,即无法区分不同位置的Token。为此我们大体有两个选择: 想办法将位置信息融入到输入中,这构成了绝对位置编码的一般做法; 想办法微调一下Attention结构,使得它有能力分辨不同位置的Token,这构成了相对位置编码的一般做法。 虽然说起来主要就是绝对位置编码和相对位置编码两大类,但每一类其实又能衍生出各种各样的变种,为此研究人员可算是煞费苦心、绞尽脑汁了,此外还有一些不按套路出牌的位置编码。本文就让我们来欣赏一下研究人员为了更好地表达位置信息所构建出来的“八仙过海,各显神通”般的编码方案。 绝对位置编码 形式上来看,绝对位置编码是相对简单的一种方案,但即便如此,也不妨碍各路研究人员的奇思妙想,也有不少的变种。一般来说,绝对位置编码会加到输入中:在输入的第 𝑘 个向量 \(𝑥_𝑘\) 中加入位置向量 \(𝑝_𝑘\) 变为 \(\boldsymbol{x}_k + \boldsymbol{p}_k\) ,其中 \(...
Large Model
2026-03-10

k1.5—CoT强化训练 概述 Kimi k1.5采用了一种简化而有效的强化学习框架,其核心在于长上下文扩展和改进的策略优化方法,而不依赖于更复杂的技术如蒙特卡洛树搜索、价值函数和过程奖励模型。 问题设定 给定训练数据集 \(D = \{(x_i, y^*_i)\}_{i=1}^n\) ,其中包含问题 \(x_i\) 和对应的真实答案 \(y^*_i\) ,目标是训练一个策略模型 \(\pi_\theta\) 来准确解决测试问题。在复杂推理场景中,思维链(CoT)方法提出使用一系列中间步骤 \(z = (z_1, z_2, ..., z_m)\) 来连接问题 \(x\) 和答案 \(y\) ,每个 \(z_i\) 是解决问题的重要中间步骤。 当解决问题 \(x\) 时,思维 \(z_t \sim \pi_\theta(\cdot|x, z_1, ..., z_{t-1})\) 被自回归采样,最终答案 \(y \sim \pi_\theta(\cdot|x, z_1, ..., z_m)\) 。 强化学习目标 基于真实答案 \(y^*\) ,分配一个值 \(r(x, y, y^*)...
Computer Vision
2026-02-26
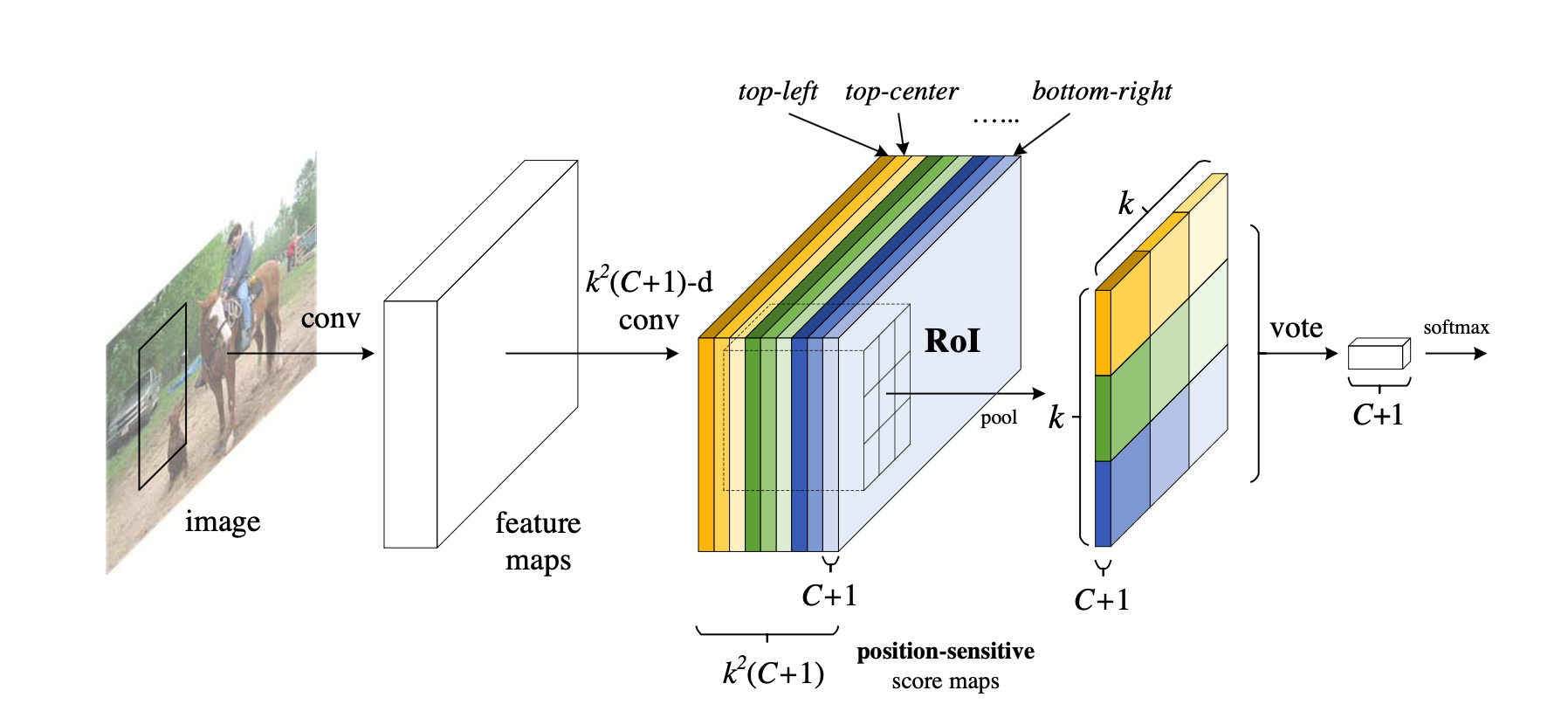
动机 Faster R-CNN是首个利用CNN来完成proposals的预测的,之后的很多目标检测网络都是借助了Faster R-CNN的思想。而Faster R-CNN系列的网络都可以分成2个部分: Fully Convolutional subnetwork before RoI Layer RoI-wise subnetwork 第1部分就是直接用普通分类网络的卷积层,用其来提取共享特征,然后一个RoI Pooling Layer在第1部分的最后一张特征图上进行提取针对各个RoIs的特征向量(或者说是特征图,维度变换一下即可),然后将所有RoIs的特征向量都交由第2部分来处理(分类和回归),而第二部分一般都是一些全连接层,在最后有2个并行的loss函数:softmax和smoothL1,分别用来对每一个RoI进行分类和回归,这样就可以得到每个RoI的真实类别和较为精确的坐标和长宽了。...
Computer Vision
2026-02-26

Deformable Conv v1 这篇文章其实比较老了,是 2017 年 5 月出的 Motivation Task 上的难点 视觉任务中一个难点就是如何 model 物体的几何变换,比如由于物体大小,pose, viewpoint 引起的。一般有两类做法: 在数据集上做文章,让 training dataset 就包含所有可能的集合变换。通过 affine transformation 去做 augmentation 另一种就是设计 transformation-invariant (对那些几何变换不变)的 feature 和算法。比如 SIFT 和 sliding window 的方式。 文章说上述两种方式有问题,几何变换我们是事先知道的,这种不能 generalize 到其它场景和任务中。以及 hand-crafted 的设计适应不了负责场景。 CNN 的缺陷 对于geometric transformation 的问题,目前的 CNN 主要是通过 data augmentation 和一些手工设计,比如 max-pooling 解决的(max-pooling...
NLP
2026-01-24

旋转式位置编码(ROPE) 原始的Sinusoidal位置编码总的感觉是一种“想要成为相对位置编码的绝对位置编码”。一般来说,绝对位置编码具有实现简单、计算速度快等优点,而相对位置编码则直接地体现了相对位置信号,跟我们的直观理解吻合,实际性能往往也更好。由此可见,如果可以通过绝对位置编码的方式实现相对位置编码,那么就是“集各家之所长”、“鱼与熊掌兼得”了。Sinusoidal位置编码隐约做到了这一点,但并不够好。 本文将会介绍我们自研的Rotary Transformer(RoFormer)模型,它的主要改动是应用了笔者构思的“旋转式位置编码(Rotary Position Embedding,RoPE)”,这是一种配合Attention机制能达到“绝对位置编码的方式实现相对位置编码”的设计。而也正因为这种设计,它还是目前唯一一种可用于线性Attention的相对位置编码。 RoFormer:https://github.com/ZhuiyiTechnology/roformer 基本思路 这里简要介绍过RoPE: Transformer位置编码...
Self-Supervised
2026-01-23

如果把 近几年对比学习在视觉领域有代表性的工作做一下总结,那么对比学习的发展历程大概可以分为四个阶段: 百花齐放 这个阶段代表性工作有InstDisc(instance discrimination,)、CPC、CMC等。在这个阶段中,方法、模型、目标函数、代理任务都还没有统一,所以说是一个百花齐放的时代 CV双雄 代表作有MoCo v1、SimCLR v1、MoCo v2、SimCLR v2;CPC、CMC的延伸工作、SwAV等。这个阶段发展非常迅速,有的工作间隔甚至不到一个月,ImageNet上的成绩基本上每个月都在被刷新。 不用负样本 BYOL及其改进工作、SimSiam(CNN在对比学习中的总结性工作) transformer MoCo v3、DINO。这个阶段,无论是对比学习还是最新的掩码学习,都是用Vision Transformer做的。 第一阶段:百花齐放(2018-2019Mid) InstDisc(instance discrimination) 这篇文章提出了个体判别任务(代理任务)以及 memory bank ,非常经典,后人给它的方法起名为InstDisc。...
Self-Supervised
2026-01-23
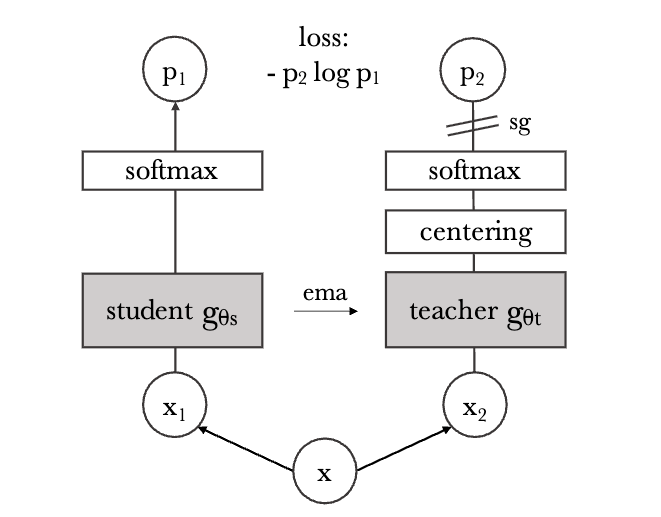
DINO Emerging Properties in Self-Supervised Vision Transformers 论文地址: arxiv.org/pdf/2104.14294 DINO摇摆到了动量式更新,果然【加动量】还是比【只用梯度停止】香。DINO的名字来自于Self- di stillation with no labels中的蒸馏和No标签。 DINO的训练步骤 其实以前的对比学习方案也可以理解为知识蒸馏,DINO里更具体得描述了知识蒸馏的含义。 下图展示了一个样本通过数据增强得到一对views \((x_1,x_2)\) 。注意DINO后面还会使用更复杂的裁剪和对比方案,但这里简单起见先不考虑那些。模型将输入图像的两种不同的随机变换 \(x_1\) 和 \(x_2\) 分别传递给学生和教师网络。 这两个网络具有相同的架构,但参数不同 。教师网络的输出以batch内计算的平均值,进行中心化(减去均值)。每个网络输出一个 \(K\)...
Self-Supervised
2026-01-23
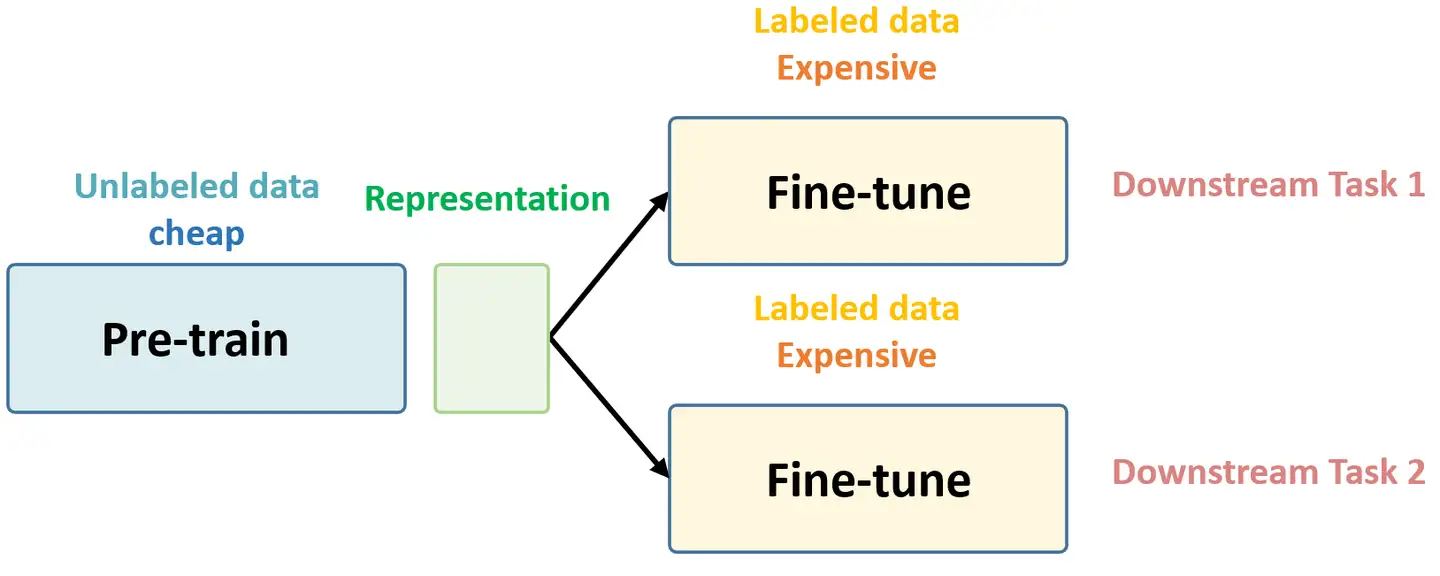
Self-Supervised Learning ,又称为自监督学习,我们知道一般机器学习分为有监督学习,无监督学习和强化学习。 而 Self-Supervised Learning 是无监督学习里面的一种,主要是希望能够学习到一种 通用的特征表达 用于 下游任务 (Downstream Tasks) 。 其主要的方式就是通过自己监督自己。作为代表作的 kaiming 的 MoCo 引发一波热议, Yann Lecun也在 AAAI 上讲 Self-Supervised Learning 是未来的大势所趋。所以在这个系列中,我会系统地解读 Self-Supervised Learning 的经典工作。 总结下 Self-Supervised Learning 的方法,用 4 个英文单词概括一下就是: Unsupervised Pre-train, Supervised Fine-tune. 这段话先放在这里,可能你现在还不一定完全理解,后面还会再次提到它。 在预训练阶段我们使用 无标签的数据集 (unlabeled data) ,因为有标签的数据集 很贵...
Self-Supervised
2026-01-23
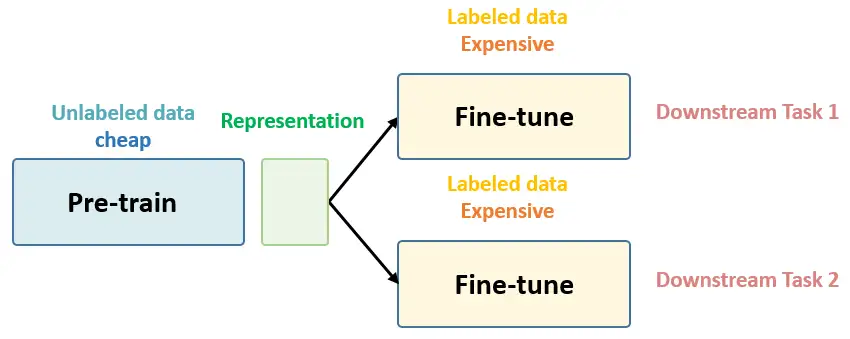
总结下 Self-Supervised Learning 的方法,用 4 个英文单词概括一下就是: Unsupervised Pre-train, Supervised Fine-tune. 在预训练阶段我们使用 无标签的数据集 (unlabeled data) ,因为有标签的数据集 很贵 ,打标签得要多少人工劳力去标注,那成本是相当高的,所以这玩意太贵。相反,无标签的数据集网上随便到处爬,它 便宜 。在训练模型参数的时候,我们不追求把这个参数用带标签数据从 初始化的一张白纸 给一步训练到位,原因就是数据集太贵。于是 Self-Supervised Learning 就想先把参数从 一张白纸 训练到 初步成型 ,再从 初步成型 训练到 完全成型 。注意这是2个阶段。这个 训练到初步成型的东西 ,我们把它叫做 Visual Representation 。预训练模型的时候,就是模型参数从 一张白纸 到 初步成型 的这个过程,还是用无标签数据集。等我把模型参数训练个八九不离十,这时候再根据你 下游任务 (Downstream Tasks) 的不同去用带标签的数据集把参数训练到 完全成型...