
💡 GRPO相比PPO主要优势: 1. 训练更稳定 引入 KL 散度惩罚项,有效控制策略更新的幅度,避免策略崩溃,提高训练的稳定性 GRPO用组内相对优势替代value model,消除了value估计误差 通过组内归一化,自动消除reward scale和bias的影响 实验中发现GRPO的advantage方差比PPO小30%左右,训练崩溃率更低 2. 工程更简单 只需要1-2个模型(policy + reference),而PPO需要4个 显存占用减少50%以上,训练速度提升2-3倍 超参数更少,更容易调优 3. 相对奖励机制 通过对同一输入生成的多个输出进行比较,GRPO 能够更稳定地估计优势函数,减少了训练过程中的方差 背景 GRPO是 DeepSeek-Math model中提出的对PPO方法的改进策略: 强化学习(RL)在提升模型数学推理能力方面被证明是有效的 传统PPO算法需要较大训练资源 GRPO作为PPO的变体被提出,可以更高效地优化模型 PPO Vs GRPO PPO回顾 PPO的目标函数为: \[\begin{aligned}J_{PPO}(\theta) =...
Large Model
2026-03-10

k1.5—CoT强化训练 概述 Kimi k1.5采用了一种简化而有效的强化学习框架,其核心在于长上下文扩展和改进的策略优化方法,而不依赖于更复杂的技术如蒙特卡洛树搜索、价值函数和过程奖励模型。 问题设定 给定训练数据集 \(D = \{(x_i, y^*_i)\}_{i=1}^n\) ,其中包含问题 \(x_i\) 和对应的真实答案 \(y^*_i\) ,目标是训练一个策略模型 \(\pi_\theta\) 来准确解决测试问题。在复杂推理场景中,思维链(CoT)方法提出使用一系列中间步骤 \(z = (z_1, z_2, ..., z_m)\) 来连接问题 \(x\) 和答案 \(y\) ,每个 \(z_i\) 是解决问题的重要中间步骤。 当解决问题 \(x\) 时,思维 \(z_t \sim \pi_\theta(\cdot|x, z_1, ..., z_{t-1})\) 被自回归采样,最终答案 \(y \sim \pi_\theta(\cdot|x, z_1, ..., z_m)\) 。 强化学习目标 基于真实答案 \(y^*\) ,分配一个值 \(r(x, y, y^*)...
Generative Model
2026-03-04

SD模型原理 SD是CompVis、Stability AI和LAION等公司研发的一个文生图模型,它的模型和代码是开源的,而且训练数据LAION-5B也是开源的。SD在开源90天github仓库就收获了 33K的stars ,可见这个模型是多受欢迎。 SD是一个 基于latent的扩散模型 ,它在UNet中引入text condition来实现基于文本生成图像。SD的核心来源于 Latent Diffusion 这个工作,常规的扩散模型是基于pixel的生成模型,而Latent Diffusion是基于latent的生成模型,它先采用一个autoencoder将图像压缩到latent空间,然后用扩散模型来生成图像的latents,最后送入autoencoder的decoder模块就可以得到生成的图像。 基于latent的扩散模型的优势在于计算效率更高效,因为图像的latent空间要比图像pixel空间要小,这也是SD的核心优势...
Generative Model
2026-03-04

Flow Matching 其实是将 flow 的离散形式转换为连续形式(连续标准化流CNF),进而可以看成是一个ODE方程,实际求解的是这个ODE 求解的核心思路是:构建速度场通过数值积分求解位移,也就是通过预测速度场,从而转为ode求解 从概率路径的角度上来说,解是无穷多的,不同的方法本质上讲是在于构造尽可能简单、直接、易解的概率路径 通过不同的条件概率路径,可以构造出VP(score matching)、 VE(diffusion)、OT(1-rectified flow)等形式 实际的边缘概率分布路径并不是一条直线 ,我们是通过拟合条件速度场来逼近边缘速度场, 即使我们证明了对于参数 \(\theta\) 来说优化目标是等价的,但终究还是有一些gap Flow-based Models Normalizing Flow Normalizing Flow 是一种基于 变换 对概率分布进行建模的模型,其通过一系列 离散且可逆的变换 实现任意分布与先验分布(例如标准高斯分布)之间的相互转换。在 Normalizing Flow...
Generative Model
2026-03-04
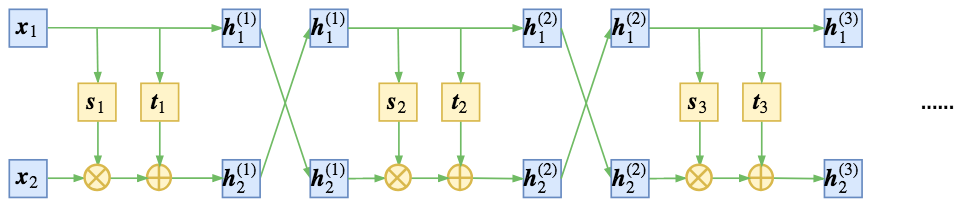
精巧的flow 不得不说,flow模型是一个在设计上非常精巧的模型。总的来看,flow就是想办法得到一个encoder将输入 𝑥 编码为隐变量 𝑧,并且使得 𝑧 服从标准正态分布。 得益于flow模型的精巧设计,这个encoder是可逆的,从而我们可以立马从encoder写出相应的decoder(生成器)出来,因此,只要encoder训练完成,我们就能同时得到decoder,完成生成模型的构建 。 为了完成这个构思,不仅仅要使得模型可逆,还要使得对应的雅可比行列式容易计算,为此,NICE提出了加性耦合层,通过多个加性耦合层的堆叠,使得模型既具有强大的拟合能力,又具有单位雅可比行列式。就这样,一种不同于VAE和GAN的生成模型——flow模型就这样出来了,它通过巧妙的构造,让我们能直接去拟合概率分布本身。 待探索的空间...
Generative Model
2026-03-03

1-Rectified Flow 可以认为是 flow matching的ot最优传输形式 Rectified Flow目的是将多对多无约束映射 转变成 一对一有约束映射。 ode会保证路径是“因果”的,也就是避免相交的情况 2-Rectified Flow或者叫Reflow 核心的实际上是加噪过程的样本交点数目降低,交点处模型无法精确学习向量场,交点数少了,模型在每个点预测都更准了,加噪过程是直线,所以能更少步数走到起点(但整体采样过程不是直线) 原本随机采样的DDPM模型中,也隐含了一个确定性的采样过程DDIM,它的连续极限也是一个ODE 。 细想上述过程, 可以发现不管是“DDPM→DDIM”还是“SDE→ODE”,都是从随机采样模型过渡到确定性模型,而如果我们一开始的目标就是ODE,那么该过程未免显得有点“迂回”了 。在本文中,笔者尝试给出ODE扩散模型的直接推导,并揭示了它与雅可比行列式、热传导方程等内容的联系。 Rectified Flow 理论推导 微分方程...
Generative Model
2026-03-03

基于文章 《Elucidating the Design Space of Diffusion-Based Generative Models》 来统一扩散模型框架 通用扩散模型框架推导 加噪公式 Flow Matching的一步加噪公式 \[\mathbf{x}_t=(1-t)\mathbf{x}_0+t\varepsilon\] 写成概率分布形式: \[p(\mathbf{x}_t|\mathbf{x}_0)=\mathcal{N}(\mathbf{x}_t;(1-t)\mathbf{x}_0,t^2\mathbf{I})\] Score Matching的一步加噪公式 \[\mathbf{x}_t=\mathbf{x}_0+\sigma_t\varepsilon \] 写成概率分布形式: \[p(\mathbf{x}_t|\mathbf{x}_0)=\mathcal{N}(\mathbf{x}_t;\mathbf{x}_0,\sigma_t^2\mathbf{I})\] DDPM/DDIM的一步加噪公式...
Generative Model
2026-03-03

背景 本文主要是 《NICE: Non-linear Independent Components Estimation》 一文的介绍和实现。这篇文章也是glow这个模型的基础文章之一,可以说它就是glow的奠基石。 艰难的分布 众所周知,目前主流的生成模型包括VAE和GAN,但事实上除了这两个之外,还有基于flow的模型(flow可以直接翻译为“流”,它的概念我们后面再介绍)。事实上flow的历史和VAE、GAN它们一样悠久,但是flow却鲜为人知。在我看来,大概原因是flow找不到像GAN一样的诸如“造假者-鉴别者”的直观解释吧,因为flow整体偏数学化,加上早期效果没有特别好但计算量又特别大,所以很难让人提起兴趣来。不过现在看来,OpenAI的这个好得让人惊叹的、基于flow的glow模型,估计会让更多的人投入到flow模型的改进中。 glow模型生成的高清人脸 生成模型的本质,就是希望用一个我们知道的概率模型来拟合所给的数据样本, 也就是说,我们得写出一个带参数 \(𝜃\) 的分布 \(q_{\boldsymbol{\theta}}(\boldsymbol{x})\)...
3D Model
2026-02-12

深度相机 “工欲善其事必先利其器‘’我们先从能够获取RGBD数据的相机开始谈起。首先我们来看一看其分类。 根据其工作原理主要分为三类: 1.双目方案 基于双目立体视觉的深度相机类似人类的双眼,和基于TOF、结构光原理的深度相机不同,它不对外主动投射光源,完全依靠拍摄的两张图片(彩色RGB或者灰度图)来计算深度,因此有时候也被称为被动双目深度相机。比较知名的产品有STEROLABS 推出的 ZED 2K Stereo Camera和Point Grey 公司推出的 BumbleBee。 双目立体视觉是基于视差原理,由多幅图像获取物体三维几何信息的方法。在机器视觉系统中, 双目视觉一般由双摄像机从不同角度同时获取周围景物的两幅数字图像,或有由单摄像机在不同时刻从不同角度获取周围景物的两幅数字图像 ,并基于视差原理即可恢复出物体三维几何信息,重建周围景物的三维形状与位置。 双目视觉有的时候我们也会把它称为体视,是人类利用双眼获取环境三维信息的主要途径。从目前来看,随着机器视觉理论的发展,双目立体视觉在机器视觉研究中发回来看了越来越重要的作用 为什么非得用双目相机才能得到深度?...
3D Model
2026-02-12
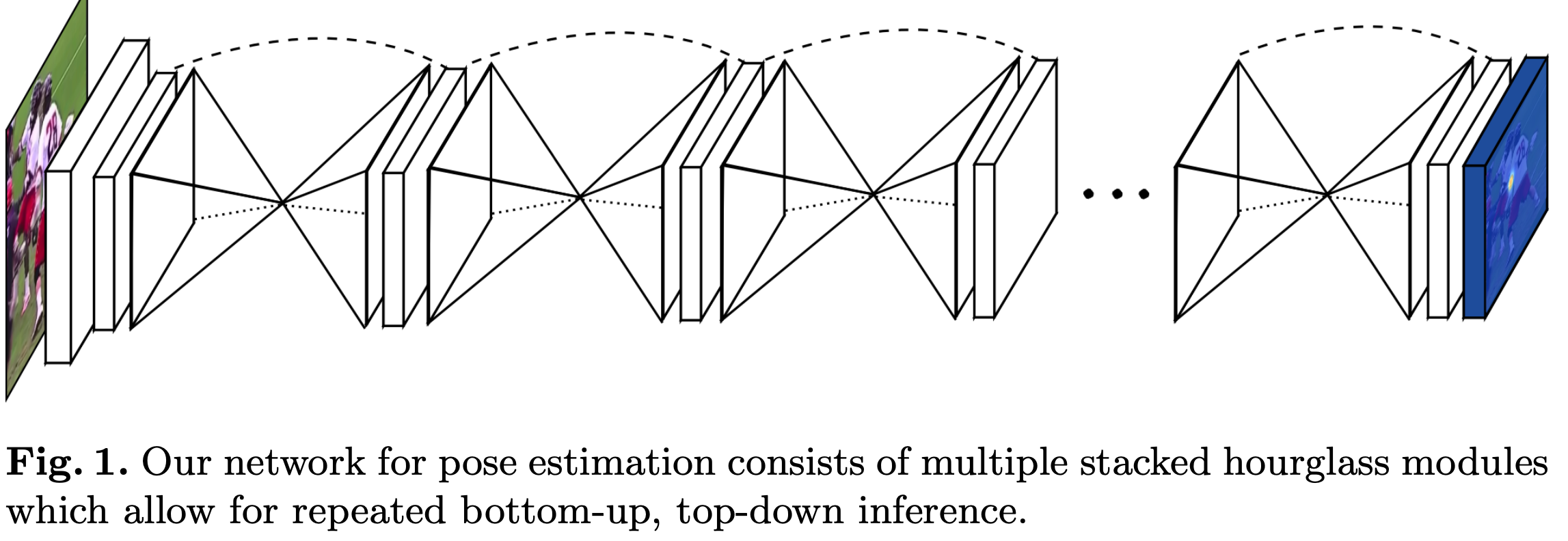
论文介绍了一种新的网络结构用于人体姿态检测,作者在论文中展现了不断重复bottom-up、top-down过程以及运用intermediate supervison(中间监督)对于网络性能的提升,下面来介绍Stacked Hourglass Networks. 简介 理解人类的姿态对于一些高级的任务比如行为识别来说特别重要,而且也是一些人机交互任务的基础。作者提出了一种新的网络结构Stacked Hourglass Networks来对人体的姿态进行识别,这个网络结构能够捕获并整合图像所有尺度的信息。之所以称这种网络为Stacked Hourglass Networks,主要是它长得很像堆叠起来的沙漏,如下图所示: 这种堆叠在一起的Hourglass模块结构是对称的,bottom-up过程将图片从高分辨率降到低分辨率,top-down过程将图片从低分辨率升到高分辨率,这种网络结构包含了许多pooling和upsampling的步骤,pooling可以将图片降到一个很低的分辨率,upsampling可以结合多个分辨率的特征。 下面介绍具体的网络结构。 Hourglass Module...
3D Model
2026-02-12

概述 问题定义 广义的 Gaze Estimation 泛指与眼球、眼动、视线等相关的研究,因此有不少做 saliency 和 egocentric 的论文也以 gaze 为关键词。而本文介绍的 Gaze Estimation 主要以眼睛图像或人脸图像为处理对象,估算人的视线方向或注视点位置, 如下图所示。 gaze角度的表示一般使用一个3d向量作为表示,也可以转换为pitch 和yaw角度,具体可参考 欧拉角、旋转矩阵、旋转向量、四元数 Model Gaze模型一般使用回归模型,所以这里基本只介绍一些在gaze model中使用的小技巧 Rle Loss RLE Loss 实际问题 Gaze采集标定方案
3D Model
2026-02-12
整体流程 # 文件夹biaoding处理加crop以及生成.yml系列文件,保存在calib_params以及biaoding_pipeline文件夹中
0_test_calibprocess.sh
# 内参标定,往往需要多天数据,且要保证标定板出现的多样性以及cover大部分区域
1_calib_intrics.sh
# 外参标定,使用混合的内参对单天数据进行外参标定,最好loss在0.000x
1_calib_extrics.sh
# 修改anchor.yaml相机信息进行15标定,loss 100以下,A88参考为50左右
2_test_merge.sh
# 选择数据送标anchor,返回后, loss 0.00x, 不准基本就是anchor标错或者方向盘等位置发生运动
python tools/display_tags.py --anchor_path /mnt/.../anchor
3_test_anchors.sh
# 检查anchor的3d位置是否正确
# 首先根据点位加入颜色
python 3_addcolor_anchor.py
#...