
💡 GRPO相比PPO主要优势: 1. 训练更稳定 引入 KL 散度惩罚项,有效控制策略更新的幅度,避免策略崩溃,提高训练的稳定性 GRPO用组内相对优势替代value model,消除了value估计误差 通过组内归一化,自动消除reward scale和bias的影响 实验中发现GRPO的advantage方差比PPO小30%左右,训练崩溃率更低 2. 工程更简单 只需要1-2个模型(policy + reference),而PPO需要4个 显存占用减少50%以上,训练速度提升2-3倍 超参数更少,更容易调优 3. 相对奖励机制 通过对同一输入生成的多个输出进行比较,GRPO 能够更稳定地估计优势函数,减少了训练过程中的方差 背景 GRPO是 DeepSeek-Math model中提出的对PPO方法的改进策略: 强化学习(RL)在提升模型数学推理能力方面被证明是有效的 传统PPO算法需要较大训练资源 GRPO作为PPO的变体被提出,可以更高效地优化模型 PPO Vs GRPO PPO回顾 PPO的目标函数为: \[\begin{aligned}J_{PPO}(\theta) =...
Large Model
2026-03-18
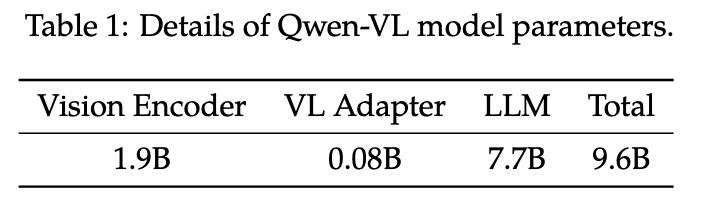
Qwen-VL 模型框架 Qwen-VL的整体网络架构由三个组件组成: LLM:使用 Qwen-7B 的预训练权重进行初始化。 视觉编码器:Qwen-VL 的可视化编码器使用ViT 架构,使用 Openclip 的 ViT-bigG 的预训练权重进行初始化。在训练和推理过程中,输入图像的大小都会调整为特定分辨率。视觉编码器通过以 14 步幅将图像分割成块来处理图像,生成一组图像特征。 位置感知视觉语言适配器:为了缓解长图像特征序列带来的效率问题,Qwen-VL 引入了一种视觉语言适配器来压缩图像特征。类似QFormer,该适配器包括一个随机初始化的单层交叉注意力模块。使用一组可训练向量(嵌入)作为query,并将视觉编码器中的图像特征作为交叉注意力作的key。该机制将视觉特征序列压缩到固定长度 256。 图像输入 图像不会直接以像素形式喂给语言模型(LLM)。 典型流程是: Visual Encoder :把图片编码成一串视觉特征(embedding/feature sequence)。 Adapter :把视觉特征映射到语言模型可接入的表征空间/维度。 最终得到:...
Large Model
2026-03-18
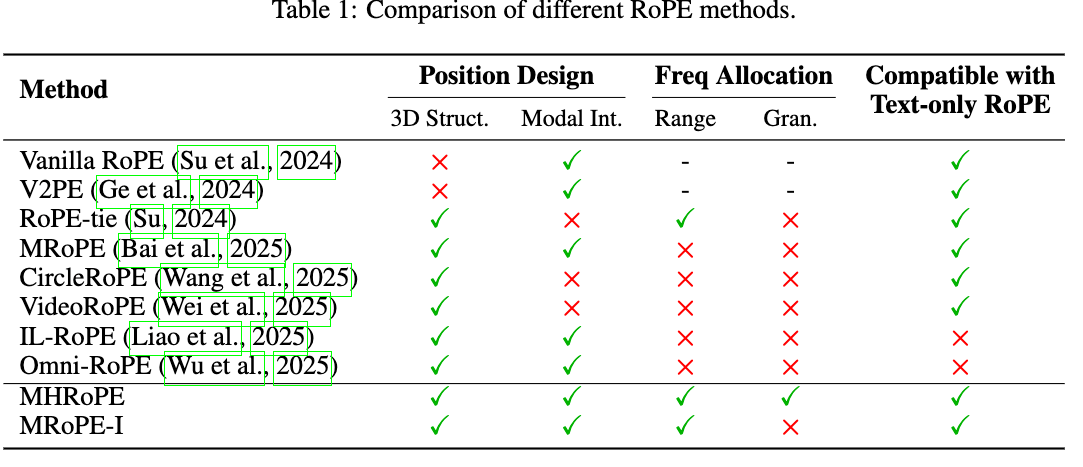
简介 论文: 《REVISITING MULTIMODAL POSITIONAL ENCODING IN VISION–LANGUAGE MODELS》 通过对多模态旋转位置嵌入(RoPE)的两个核心组件——位置设计和频率分配进行综合分析。通过实验,确定了三个关键指南:位置一致性、频率全利用和保留文本先验。基于这些见解,提出了多头RoPE(MHRoPE)和MRoPE-Interleave(MRoPE-I),这两种简单且即插即用的变体不需要任何架构更改。 为了构建更稳健的多模态位置编码,作者在MRoPE的基础上,系统地探索了三个未充分研究的方案: 位置设计——如何为文本和视觉标记分配无歧义、分离良好的坐标; 频率分配——如何将旋转频率分配到每个位置轴的嵌入维度; 与纯文本RoPE的兼容性——确保设计默认为标准RoPE,以便进行有效的迁移学习。 Vanilla RoPE RoPE与加性位置嵌入不同,RoPE对query和key向量应用旋转变换,从而将相对位置依赖直接纳入自注意力机制。给定位置 \(m\) 的查询向量 \(q\) 和位置 \(n\) 的键向量 \(k\) ,注意力分数...
Large Model
2026-03-10

问题背景 首先简化一下问题,本文所讨论的多模态,主要指图文混合的双模态,即输入和输出都可以是图文。可能有不少读者的第一感觉是:多模态模型难道不也是烧钱堆显卡,Transformer“一把梭”,最终“大力出奇迹”吗? 其实没那么简单。先看文本生成,事实上文本生成自始至终都只有一条主流路线,那就是语言模型,即建模条件概率 \(p(x_t|x_1,\cdots,x_{t-1})\) ,不论是最初的 n-gram语言模型,还是后来的Seq2Seq、GPT,都是这个条件概率的近似。也就是说,一直以来,人们对“实现文本生成需要往哪个方向走”是很明确的,只是背后所用的模型有所不同,比如LSTM、CNN、Attention乃至最近复兴的线性RNN等。所以, 文本生成确实可以All in Transformer来大力出奇迹,因为方向是标准的、清晰的。 然而,对于图像生成,并没有这样的“标准方向”。就本站所讨论过的图像生成模型,就有 VAE 、 GAN 、 Flow 、 Diffusion ,还有小众的 EBM...
Large Model
2026-03-10

k1.5—CoT强化训练 概述 Kimi k1.5采用了一种简化而有效的强化学习框架,其核心在于长上下文扩展和改进的策略优化方法,而不依赖于更复杂的技术如蒙特卡洛树搜索、价值函数和过程奖励模型。 问题设定 给定训练数据集 \(D = \{(x_i, y^*_i)\}_{i=1}^n\) ,其中包含问题 \(x_i\) 和对应的真实答案 \(y^*_i\) ,目标是训练一个策略模型 \(\pi_\theta\) 来准确解决测试问题。在复杂推理场景中,思维链(CoT)方法提出使用一系列中间步骤 \(z = (z_1, z_2, ..., z_m)\) 来连接问题 \(x\) 和答案 \(y\) ,每个 \(z_i\) 是解决问题的重要中间步骤。 当解决问题 \(x\) 时,思维 \(z_t \sim \pi_\theta(\cdot|x, z_1, ..., z_{t-1})\) 被自回归采样,最终答案 \(y \sim \pi_\theta(\cdot|x, z_1, ..., z_m)\) 。 强化学习目标 基于真实答案 \(y^*\) ,分配一个值 \(r(x, y, y^*)...
Large Model
2026-03-06
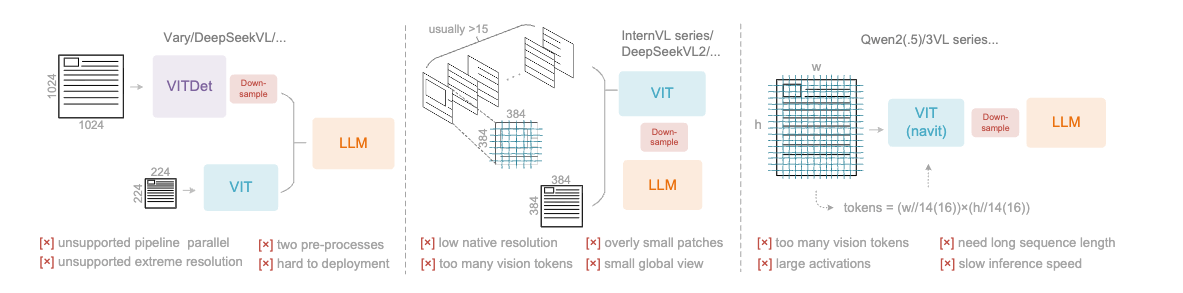
DeeSeek-OCR 简介 当前的大型语言模型(LLMs)在处理长文本时面临显著的计算挑战,其开销随序列长度呈二次增长。本文探索一种潜在的解决方案:将视觉模态作为高效的文本信息压缩媒介。 单张包含文档文本的图像,能够用显著更少的 token 表达丰富信息,相比等量的数字文本更为紧凑;这表明,通过视觉 token 进行光学压缩有望实现更高的压缩比。 本文关注视觉编码器如何提升 LLM 在处理文本信息时的效率,而非人类本就擅长的基础 VQA 任务 当前主流 VLM 视觉编码器的问题 第一类是以 Vary 为代表的双塔(dual-tower)架构,通过并行的 SAM 编码器来提升高分辨率图像处理时的视觉词表参数规模。该方法虽然在参数量与激活内存上更可控,但也存在显著缺点:需要对图像进行两套预处理,增加了部署复杂度;同时在训练中使编码器管线的并行化变得困难。 第二类是以 InternVL2.0 为代表的切片(tile-based)方法,通过将图像划分为小块并行处理,在高分辨率场景下降低激活内存。尽管这种方法能够处理极高分辨率,但由于其原生编码器分辨率通常较低(低于...
Large Model
2026-03-04
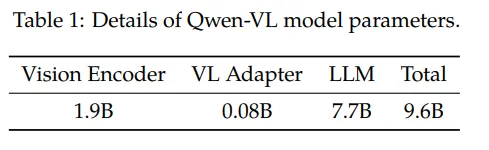
Qwen-VL系列 Qwen-VL 阿里巴巴的Qwen-VL是另一个比较经典的模型,十分值得作为案例介绍多模态大模型的训练要点。Qwen-VL使用Qwen-7B LLM作为语言模型基座,Openclip预训练的ViT-bigG作为视觉特征Encoder,随机初始化的单层Cross-Attention模块作为视觉和自然语言的的Adapter,总参数大小约9.6B。 如下图,Qwen-VL的训练过程分为三个阶段: Stage1 为预训练,目标是使用大量的图文Pair对数据对齐视觉模块和LLM的特征,这个阶段冻结LLM模块的参数; Stage2 为多任务预训练,使用更高质量的图文多任务数据(主要来源自开源VL任务,部分自建数据集),更高的图片像素输入,全参数训练; Stage3 为指令微调阶段,这个阶段冻结视觉Encoder模块,使用的数据主要来自大模型Self-Instruction方式自动生成,目标是提升模型的指令遵循和多轮对话能力。...
Large Model
2026-03-04
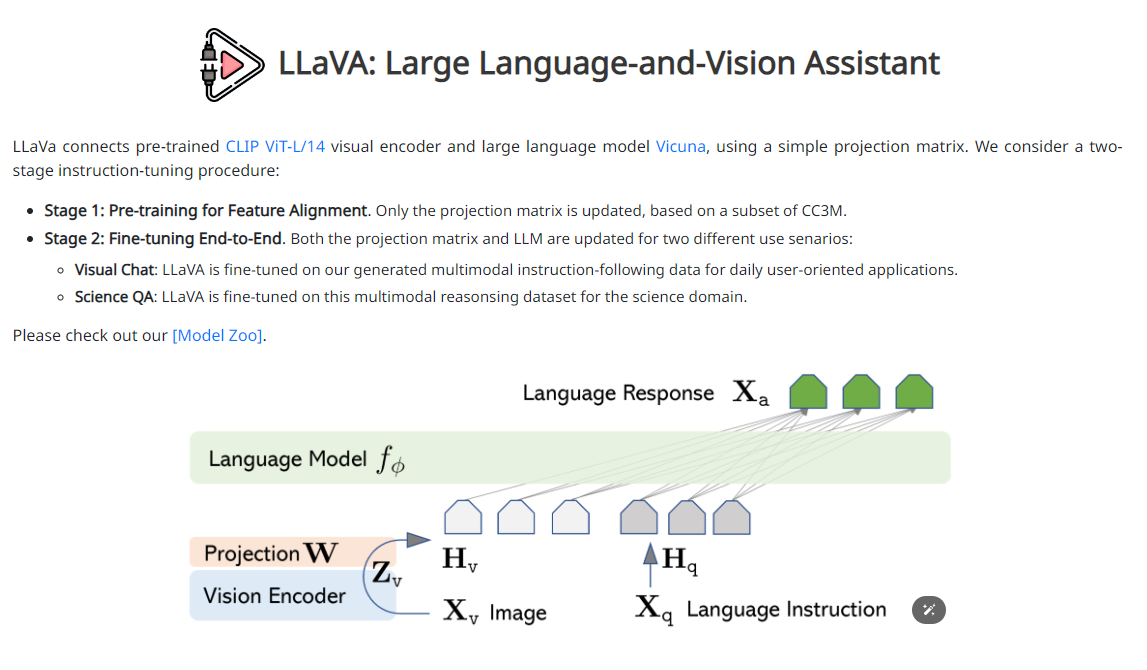
项目: https://llava-vl.github.io/ github: https://github.com/haotian-liu/LLaVA 一句话 优点 : 极大简化了VLM的训练方式:Pre-training + Instruction Tuning 训练量得到简化:1M量级数据+ 8卡A100 → 一天完成训练 LLaVA LLaVA是2023的连续工作,包含了LLaVA 1.0, 1.5, 1.6几个版本(后续会有更多),也是2023年多模态领域妥妥的顶流。发表9个月620的stars,GitHub超过12K的stars。 LLaVA它的网络结构简单、微调成本比较低,任何研究组、企业甚至个人都可以基于它构建自己的领域的多模态模型。 非常建议对多模态大模型感兴趣的朋友关注LLaVA这篇工作。 简介...
Computer Vision
2026-02-26

上图是Yolo v4中,对各种detector部件的总结:包含Input、backbone、neck、head、... Backbone 轻量级网络系列 Neck 例如:SPP 、 ASPP 、 RFB、 SAM 用来增加感受野 特征融合,主要是指不同输出层直接的特征融合,主要包括FPN、PAN、SFAM、ASFF和BiFPN。 结构 Path Aggregation Blcok Deformable Convolution系列 One stage Yolo系列 Focal Loss & RetinaNet Two-Stage Faster R-CNN R-FCN Anchor Free Anchor-Free Transformer DETR Problems 目标检测中的多尺度问题 NMS及其改进 IoU loss系列 目标检测中mAP计算
Computer Vision
2026-02-26
mAP定义及相关概念 mAP: mean Average Precision, 即各类别AP的平均值 AP: PR曲线下面积,后文会详细讲解 PR曲线: Precision-Recall曲线 Precision: TP / (TP + FP) Recall: TP / (TP + FN) TP: IoU>0.5的检测框数量(同一Ground Truth只计算一次) FP: IoU<=0.5的检测框,或者是检测到同一个GT的多余检测框的数量 FN: 没有检测到的GT的数量 mAP的具体计算 由前面定义,我们可以知道,要计算mAP必须先绘出各类别PR曲线,计算出AP。而如何采样PR曲线,VOC采用过两种不同方法。 在VOC2010以前,只需要选取当Recall >= 0, 0.1, 0.2, ..., 1共11个点时的Precision最大值,然后AP就是这11个Precision的平均值。 在VOC2010及以后,需要针对每一个不同的Recall值(包括0和1),选取其大于等于这些Recall值时的Precision最大值,然后计算PR曲线下面积作为AP值。 mAP计算示例 假设,对于...
Computer Vision
2026-02-26

简介 "Anchor-free"(无锚点)是一种目标检测方法,与传统的使用锚框(anchor boxes)的方法(例如Faster R-CNN)不同。在传统方法中,锚框是预先定义的、具有不同尺寸和长宽比的矩形区域,用于捕捉不同尺寸和形状的目标。而在"anchor-free"方法中,不再使用锚框,而是直接预测目标的位置和形状,通常使用网络输出的热图和偏移信息。 以下是对"anchor-free"方法的一些关键理解点: 无需预定义锚框: 在传统目标检测方法中,需要事先定义和生成一组锚框,这可能需要大量的人工工作。而在"anchor-free"方法中,不再需要锚框,模型可以自动学习目标的位置和形状。 直接位置和形状回归: "anchor-free"方法通过输出的热图来表示目标的存在概率,并使用偏移信息来定位目标的中心和形状。这些热图和偏移信息通常通过卷积神经网络预测。 适用于不规则目标: 传统的锚框在捕捉不规则形状的目标时可能会有困难,而"anchor-free"方法可以更好地适应不规则目标的检测。 减少计算复杂性:...
Computer Vision
2026-02-26
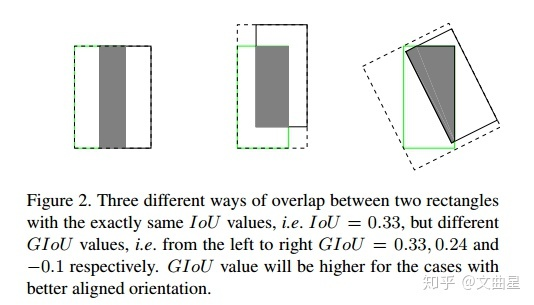
IOU(Intersection over Union) 特性(优点) IoU就是我们所说的 交并比 ,是目标检测中最常用的指标,在anchor-based的方法中,他的作用不仅用来确定正样本和负样本,还可以用来评价输出框(predict box)和ground-truth的距离。 \[IoU = \frac{|A \cap B|}{|A \cup B|}
\] 可以说 它可以反映预测检测框与真实检测框的检测效果。 还有一个很好的特性就是 尺度不变性 ,也就是对尺度不敏感(scale invariant), 在regression任务中,判断predict box和gt的距离最直接的指标就是IoU。 (满足非负性;同一性;对称性;三角不等性) import numpy as np
def Iou(box1, box2, wh=False):
if wh == False:
xmin1, ymin1, xmax1, ymax1 = box1
xmin2, ymin2, xmax2, ymax2 = box2
else:
xmin1, ymin1 =...