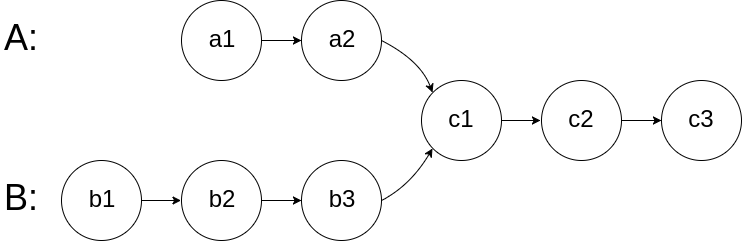
160. 相交链表 题目 给你两个单链表的头节点 headA 和 headB ,请你找出并返回两个单链表相交的起始节点。如果两个链表不存在相交节点,返回 null 。 图示两个链表在节点 c1 开始相交 : 题目数据 保证 整个链式结构中不存在环。 注意 ,函数返回结果后,链表必须 保持其原始结构 。 自定义评测: 评测系统 的输入如下(你设计的程序 不适用 此输入): intersectVal - 相交的起始节点的值。如果不存在相交节点,这一值为 0 listA - 第一个链表 listB - 第二个链表 skipA - 在 listA 中(从头节点开始)跳到交叉节点的节点数 skipB - 在 listB 中(从头节点开始)跳到交叉节点的节点数 评测系统将根据这些输入创建链式数据结构,并将两个头节点 headA 和 headB 传递给你的程序。如果程序能够正确返回相交节点,那么你的解决方案将被 视作正确答案 。 示例 1: 输入:intersectVal = 8, listA = [4,1,8,4,5], listB = [5,6,1,8,4,5], skipA = 2,...

48. 旋转图像 题目 给定一个 \(n × n\) 的二维矩阵 matrix 表示一个图像。请你将图像顺时针旋转 90 度。 你必须在 原地 旋转图像,这意味着你需要直接修改输入的二维矩阵。 请不要 使用另一个矩阵来旋转图像。 示例 1: 输入:matrix = [[1,2,3],[4,5,6],[7,8,9]]
输出:[[7,4,1],[8,5,2],[9,6,3]] 示例 2: 输入:matrix = [[5,1,9,11],[2,4,8,10],[13,3,6,7],[15,14,12,16]]
输出:[[15,13,2,5],[14,3,4,1],[12,6,8,9],[16,7,10,11]] 提示: n == matrix.length == matrix[i].length 1 <= n <= 20 -1000 <= matrix[i][j] <= 1000 题解 这是一个经典的矩阵操作问题。要在原地(In-place)将图像顺时针旋转 90 度,我们可以利用矩阵的几何性质。 最直观且易于实现的方法是将...

11. 盛最多水的容器 题目 给定一个长度为 n 的整数数组 height 。有 n 条垂线,第 i 条线的两个端点是 (i, 0) 和 (i, height[i]) 。 找出其中的两条线,使得它们与 x 轴共同构成的容器可以容纳最多的水。 返回容器可以储存的最大水量。 说明: 你不能倾斜容器。 示例 1: 输入:[1,8,6,2,5,4,8,3,7]
输出:49
解释:图中垂直线代表输入数组 [1,8,6,2,5,4,8,3,7]。在此情况下,容器能够容纳水(表示为蓝色部分)的最大值为 49。 示例 2: 输入:height = [1,1]
输出:1 提示: n == height.length 2 <= n <= 10 5 0 <= height[i] <= 10 4 题解 在初始时,左右指针分别指向数组的左右两端,它们可以容纳的水量为 \(min(1,7)∗8=8\) 。 此时我们需要移动一个指针。移动哪一个呢?直觉告诉我们,应该移动对应数字较小的那个指针(即此时的左指针)。这是因为,由于容纳的水量是由 两个指针指向的数字中较小值∗指针之间的距离...
NLP
2026-01-24

旋转式位置编码(ROPE) 原始的Sinusoidal位置编码总的感觉是一种“想要成为相对位置编码的绝对位置编码”。一般来说,绝对位置编码具有实现简单、计算速度快等优点,而相对位置编码则直接地体现了相对位置信号,跟我们的直观理解吻合,实际性能往往也更好。由此可见,如果可以通过绝对位置编码的方式实现相对位置编码,那么就是“集各家之所长”、“鱼与熊掌兼得”了。Sinusoidal位置编码隐约做到了这一点,但并不够好。 本文将会介绍我们自研的Rotary Transformer(RoFormer)模型,它的主要改动是应用了笔者构思的“旋转式位置编码(Rotary Position Embedding,RoPE)”,这是一种配合Attention机制能达到“绝对位置编码的方式实现相对位置编码”的设计。而也正因为这种设计,它还是目前唯一一种可用于线性Attention的相对位置编码。 RoFormer:https://github.com/ZhuiyiTechnology/roformer 基本思路 这里简要介绍过RoPE: Transformer位置编码...
NLP
2026-01-24
不同于RNN、CNN等模型,对于Transformer模型来说,位置编码的加入是必不可少的,因为纯粹的Attention模块是无法捕捉输入顺序的,即无法区分不同位置的Token。为此我们大体有两个选择: 想办法将位置信息融入到输入中,这构成了绝对位置编码的一般做法; 想办法微调一下Attention结构,使得它有能力分辨不同位置的Token,这构成了相对位置编码的一般做法。 虽然说起来主要就是绝对位置编码和相对位置编码两大类,但每一类其实又能衍生出各种各样的变种,为此研究人员可算是煞费苦心、绞尽脑汁了,此外还有一些不按套路出牌的位置编码。本文就让我们来欣赏一下研究人员为了更好地表达位置信息所构建出来的“八仙过海,各显神通”般的编码方案。 绝对位置编码 形式上来看,绝对位置编码是相对简单的一种方案,但即便如此,也不妨碍各路研究人员的奇思妙想,也有不少的变种。一般来说,绝对位置编码会加到输入中:在输入的第 𝑘 个向量 \(𝑥_𝑘\) 中加入位置向量 \(𝑝_𝑘\) 变为 \(\boldsymbol{x}_k + \boldsymbol{p}_k\) ,其中 \(...
数组&链表&字符串 双指针 滑动窗口 哈希表 哈希表 栈&队列 单调队列 树与堆 图 数学 Math
Computer Vision
2026-01-11

在正式介绍之前,先简单回顾一下现有的两大类方法。第一大类,也是从非Deep时代,乃至CV初期就被就被广泛使用的方法叫做image pyramid。在image pyramid中,我们直接对图像进行不同尺度的缩放,然后将这些图像直接输入到detector中去进行检测。虽然这样的方法十分简单,但其效果仍然是最佳,也后续启发了SNIP这一系列的工作。单论性能而言,multiscale training/testing仍然是一个不可缺少的组件。然而其缺点也是很明显的,测试时间大幅度提高,对于实际使用并不友好。 另外一大类方法,也是Deep方法所独有的,也就是feature pyramid。最具代表性的工作便是经典的FPN了。这一类方法的思想是直接在feature层面上来近似image pyramid...
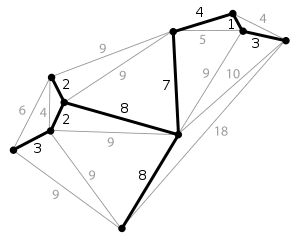
简介 生成树(spanning tree) 在图论中,无向图 G=(V,E) 的生成树(spanning tree)是具有G的全部顶点,但边数最少的联通子图。假设G中一共有n个顶点,一颗生成树满足下列条件: (1)n个顶点; (2)n1条边; (3)n个顶点联通; (4)一个图的生成树可能有多个。最小生成树(minimum spanning tree, MST)/最小生成森林:联通加权无向图中边缘权重加和最小的生成树。给定无向图 G=(V,E) , (u,v) 代表顶点 u 与顶点 v 的边, w(u,v) 代表此边的权重,若存在生成树T使得: [公式] 最小,则 T 为 G 的最小生成树。对于非连通无向图来说,它的每一连通分量同样有最小生成树,它们的并被称为最小生成森林。最小生成树除了继承...
Computer Vision
2026-01-11
在深度学习目标检测中,特别是人脸检测中,由于分辨率低、图像模糊、信息少、噪声多,小目标和小人脸的检测一直是一个实用和常见的难点问题。然而,在过去几年的发展中,也出现了一些提高小目标检测性能的解决方案。本文将对这些方法进行分析、整理和总结。 图像金字塔和多尺度滑动窗口检测 一开始,在深学习方法成为流行之前,对于不同尺度的目标,通常是从原始图像开始,使用不同的分辨率构建图像金字塔,然后使用分类器对金字塔的每一层进行滑动窗口的目标检测。 在著名的人脸检测器MTCNN中,使用图像金字塔法检测不同分辨率的人脸目标。然而,这种方法通常是缓慢的,虽然构建图像金字塔可以使用卷积核分离加速或简单粗暴地缩放,但仍需要做多个特征提取,后来有人借其想法想出一个特征金字塔网络FPN,在不同层融合特征,只需要一次正向计...
Computer Vision
2026-01-11

简介 "Anchorfree"(无锚点)是一种目标检测方法,与传统的使用锚框(anchor boxes)的方法(例如Faster RCNN)不同。在传统方法中,锚框是预先定义的、具有不同尺寸和长宽比的矩形区域,用于捕捉不同尺寸和形状的目标。而在"anchorfree"方法中,不再使用锚框,而是直接预测目标的位置和形状,通常使用网络输出的热图和偏移信息。 以下是对"anchorfree"方法的一些关键理解点: 无需预定义锚框: 在传统目标检测方法中,需要事先定义和生成一组锚框,这可能需要大量的人工工作。而在"anchorfree"方法中,不再需要锚框,模型可以自动学习目标的位置和形状。 直接位置和形状回归: "anchorfree"方法通过输出的热图来表示目标的存在概率,并使用偏移信息来定位目...
Computer Vision
2026-01-11

YOLO的核心思想就是利用整张图作为网络的输入,直接在输出层回归bounding box的位置和bounding box所属的类别。 faster RCNN中也直接用整张图作为输入,但是fasterRCNN整体还是采用了RCNN那种 proposal+classifier的思想,只不过是将提取proposal的步骤放在CNN中实现了,而YOLO则采用直接回归的思路。 YOLO v1 将一幅图像分成SxS个网格(grid cell),如果某个object的中心 落在这个网格中,则这个网格就负责预测这个object。 每个网格要预测B个bounding box,每个bounding box除了要回归自身的位置之外,还要附带预测一个confidence值。 这个confidence代表了所预测的b...
Algorithm
2026-01-11
给一个无向图,判断其是否为一棵树。如果是树的话,所有的节点必须是连接的,也就是说必须是连通图,而且不能有环,所以就变成了验证是否是连通图和是否含有环。 [代码]