
11. 盛最多水的容器 题目 给定一个长度为 n 的整数数组 height 。有 n 条垂线,第 i 条线的两个端点是 (i, 0) 和 (i, height[i]) 。 找出其中的两条线,使得它们与 x 轴共同构成的容器可以容纳最多的水。 返回容器可以储存的最大水量。 说明: 你不能倾斜容器。 示例 1: 输入:[1,8,6,2,5,4,8,3,7]
输出:49
解释:图中垂直线代表输入数组 [1,8,6,2,5,4,8,3,7]。在此情况下,容器能够容纳水(表示为蓝色部分)的最大值为 49。 示例 2: 输入:height = [1,1]
输出:1 提示: n == height.length 2 <= n <= 10 5 0 <= height[i] <= 10 4 题解 在初始时,左右指针分别指向数组的左右两端,它们可以容纳的水量为 \(min(1,7)∗8=8\) 。 此时我们需要移动一个指针。移动哪一个呢?直觉告诉我们,应该移动对应数字较小的那个指针(即此时的左指针)。这是因为,由于容纳的水量是由 两个指针指向的数字中较小值∗指针之间的距离...
129. 滑动窗口最大值 题目 给你一个整数数组 nums ,有一个大小为 k 的滑动窗口从数组的最左侧移动到数组的最右侧。你只可以看到在滑动窗口内的 k 个数字。滑动窗口每次只向右移动一位。 返回 滑动窗口中的最大值 。 示例 1: 输入:nums = [1,3,-1,-3,5,3,6,7], k = 3
输出:[3,3,5,5,6,7]
解释:
滑动窗口的位置 最大值
--------------- -----
[1 3 -1] -3 5 3 6 7 3
1 [3 -1 -3] 5 3 6 7 3
1 3 [-1 -3 5] 3 6 7 5
1 3 -1 [-3 5 3] 6 7 5
1 3 -1 -3 [5 3 6] 7 6
1 3 -1 -3 5 [3 6 7] 7 示例 2: 输入:nums = [1], k = 1
输出:[1] 提示: 1 <= nums.length...
Large Model
2026-01-20
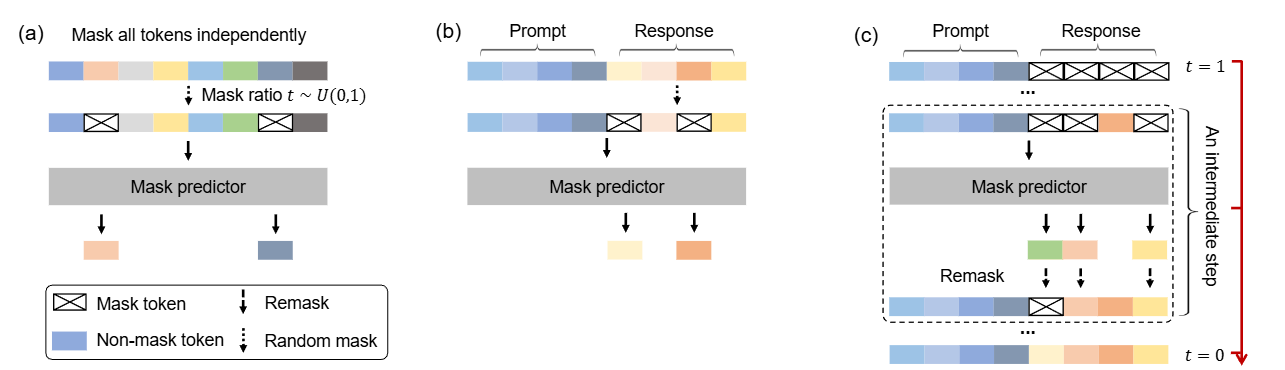
这是一篇尝试改变LLM「范式」的文章:当前主流的LLM架构都是「自回归」的,通俗地理解就是必须「从左到右依次生成」。这篇文章挑战了这一范式,探索扩散模型在 LLMs 上的可行性,通过 随机掩码 - 预测 的逆向思维,让模型学会「全局思考」。 论文: [2502.09992] Large Language Diffusion Models 背景 主流大语言模型架构:自回归模型 (Autoregressive LLMs) 过去几年, 自回归模型(Autoregressive Models, ARMs)一直是大语言模型(LLM)的主流架构。典型的自回归语言模型以Transformer解码器为基础,按照从左到右 的顺序依次预测下一个词元(token)。 形式化地,自回归模型将一个长度为 \(N\) 的文本序列 \(X=(x_1, x_2, ..., x_N)\) 的概率分解为各位置的条件概率连乘积: \[P_{\theta}(x_1, x_2, \dots, x_N) = \prod_{i=1}^{N} P_{\theta}(x_i \mid x_1, x_2, \dots,...
Large Model
2026-01-20
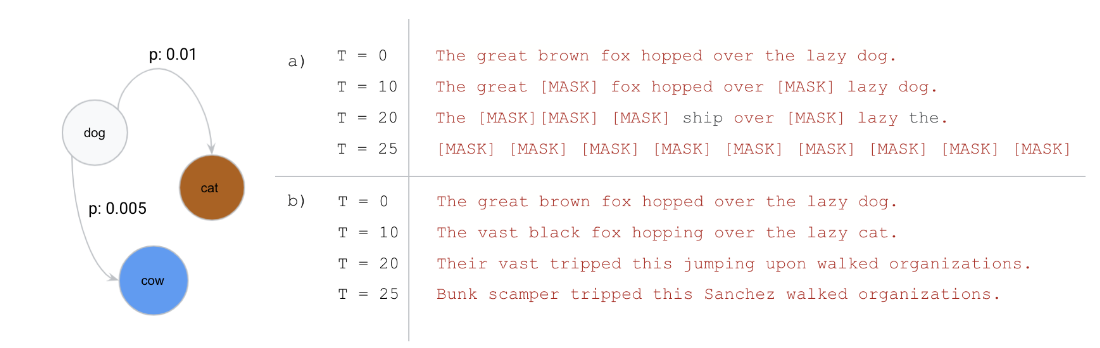
引言 Diffusion模型近年来在图像生成这一连续域任务中取得了显著成果,展现出强大的生成能力。然而,在文本生成这一离散域任务中整体效果仍不尽如人意,未能在该领域引起广泛关注。 去年,一篇研究离散扩散模型在文本生成的文章《Discrete Diffusion Modeling by Estimating the Ratios of the Data Distribution》获得ICML 2024的Best Paper,引发了学术界的广泛兴趣,也激发了新一轮的研究热潮。随后在2025年,越来越多高校和企业也开始积极探索基于Diffusion的文本生成方法。其中,近期备受关注的Block Diffusion也成功入选ICLR oral,进一步推动了该方向的发展。...
Generative Model
2026-01-19

💡 扩散模型:通过加噪的方式去学习原始数据的分布, 从学到的分布中去生成样本 DDPM 关键点: 1. 正向加噪是离散时间马尔可夫链:从 \(x_0\) 逐步加噪得到 \(x_1,x_2,...,x_T\) ;在合适的噪声调度与足够大的 \(T\) 下, \(x_T\) 近似服从 \( N(0,I) \) 的各向同性高斯。 2. 每一步噪声方差 \(β_t\) 满足 \(0<β_t<1\) ,通常随 \(t\) 增大;因此 \(q(x_t|x_{t-1}) \) 的均值缩放系数 \(\sqrt{1-β_t} \) 逐渐减小。 3. 训练通过最大化对数似然的变分下界(ELBO)来学习反向过程 \( p_θ(x_{t-1}|x_t)\) ,并将其参数化为高斯分布(神经网络预测均值/噪声或 score)。 4. 将目标写成 score/DSM 形式时,loss 的权重与对应噪声层的方差尺度(如 \(1-\bar{α}_t\) 或相关量)有关;采样通常是按学习到的反向转移逐步生成(祖先采样),与经典 Langevin MCMC 更新形式不同,但可在 SDE 视角下统一理解。...
Generative Model
2026-01-19
基于文章 《Elucidating the Design Space of Diffusion-Based Generative Models》 来统一扩散模型框架 通用扩散模型框架推导 加噪公式 Flow Matching的一步加噪公式 \[\mathbf{x}_t=(1-t)\mathbf{x}_0+t\varepsilon\] 写成概率分布形式: \[p(\mathbf{x}_t|\mathbf{x}_0)=\mathcal{N}(\mathbf{x}_t;(1-t)\mathbf{x}_0,t^2\mathbf{I})\] Score Matching的一步加噪公式 \[\mathbf{x}_t=\mathbf{x}_0+\sigma_t\varepsilon \] 写成概率分布形式: \[p(\mathbf{x}_t|\mathbf{x}_0)=\mathcal{N}(\mathbf{x}_t;\mathbf{x}_0,\sigma_t^2\mathbf{I})\] DDPM/DDIM的一步加噪公式...
Computer Vision
2026-01-11

在正式介绍之前,先简单回顾一下现有的两大类方法。第一大类,也是从非Deep时代,乃至CV初期就被就被广泛使用的方法叫做image pyramid。在image pyramid中,我们直接对图像进行不同尺度的缩放,然后将这些图像直接输入到detector中去进行检测。虽然这样的方法十分简单,但其效果仍然是最佳,也后续启发了SNIP这一系列的工作。单论性能而言,multiscale training/testing仍然是一个不可缺少的组件。然而其缺点也是很明显的,测试时间大幅度提高,对于实际使用并不友好。 另外一大类方法,也是Deep方法所独有的,也就是feature pyramid。最具代表性的工作便是经典的FPN了。这一类方法的思想是直接在feature层面上来近似image pyramid...
Computer Vision
2026-01-11
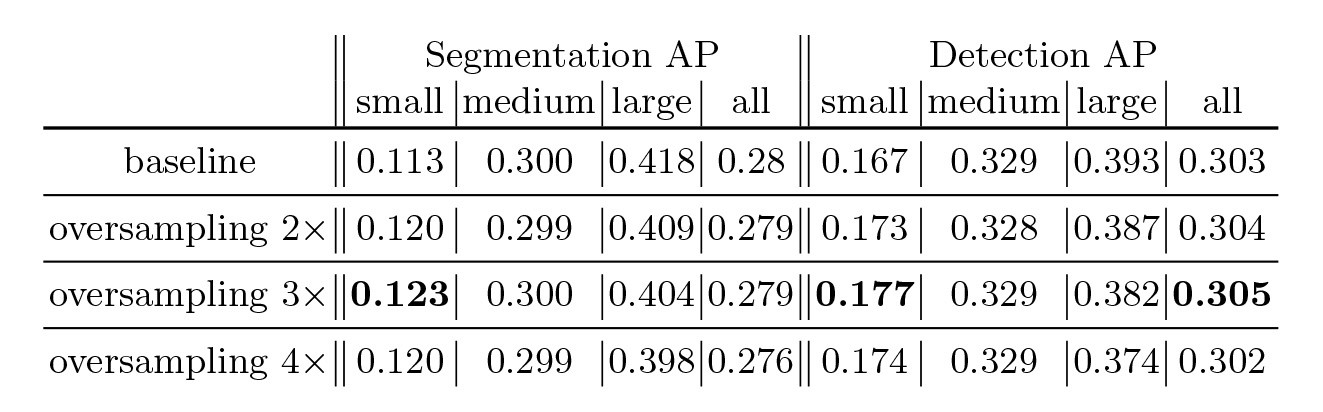
在深度学习目标检测中,特别是人脸检测中,由于分辨率低、图像模糊、信息少、噪声多,小目标和小人脸的检测一直是一个实用和常见的难点问题。然而,在过去几年的发展中,也出现了一些提高小目标检测性能的解决方案。本文将对这些方法进行分析、整理和总结。 图像金字塔和多尺度滑动窗口检测 一开始,在深学习方法成为流行之前,对于不同尺度的目标,通常是从原始图像开始,使用不同的分辨率构建图像金字塔,然后使用分类器对金字塔的每一层进行滑动窗口的目标检测。 在著名的人脸检测器MTCNN中,使用图像金字塔法检测不同分辨率的人脸目标。然而,这种方法通常是缓慢的,虽然构建图像金字塔可以使用卷积核分离加速或简单粗暴地缩放,但仍需要做多个特征提取,后来有人借其想法想出一个特征金字塔网络FPN,在不同层融合特征,只需要一次正向计...
Computer Vision
2026-01-11

简介 "Anchorfree"(无锚点)是一种目标检测方法,与传统的使用锚框(anchor boxes)的方法(例如Faster RCNN)不同。在传统方法中,锚框是预先定义的、具有不同尺寸和长宽比的矩形区域,用于捕捉不同尺寸和形状的目标。而在"anchorfree"方法中,不再使用锚框,而是直接预测目标的位置和形状,通常使用网络输出的热图和偏移信息。 以下是对"anchorfree"方法的一些关键理解点: 无需预定义锚框: 在传统目标检测方法中,需要事先定义和生成一组锚框,这可能需要大量的人工工作。而在"anchorfree"方法中,不再需要锚框,模型可以自动学习目标的位置和形状。 直接位置和形状回归: "anchorfree"方法通过输出的热图来表示目标的存在概率,并使用偏移信息来定位目...
Computer Vision
2026-01-11

YOLO的核心思想就是利用整张图作为网络的输入,直接在输出层回归bounding box的位置和bounding box所属的类别。 faster RCNN中也直接用整张图作为输入,但是fasterRCNN整体还是采用了RCNN那种 proposal+classifier的思想,只不过是将提取proposal的步骤放在CNN中实现了,而YOLO则采用直接回归的思路。 YOLO v1 将一幅图像分成SxS个网格(grid cell),如果某个object的中心 落在这个网格中,则这个网格就负责预测这个object。 每个网格要预测B个bounding box,每个bounding box除了要回归自身的位置之外,还要附带预测一个confidence值。 这个confidence代表了所预测的b...
Generative Model
2026-01-11
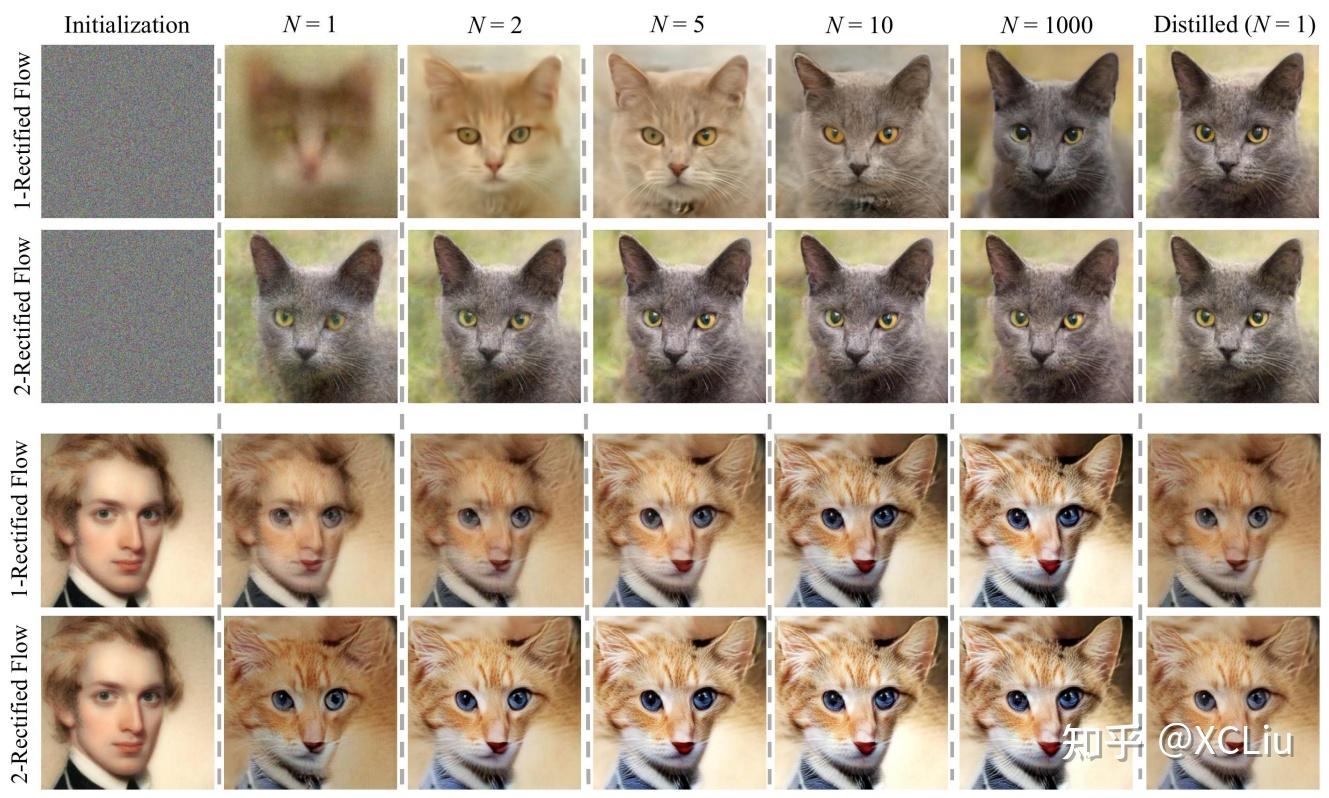
💡 原本随机采样的DDPM模型中,也隐含了一个确定性的采样过程DDIM,它的连续极限也是一个ODE。 细想上述过程,可以发现不管是“DDPM→DDIM”还是“SDE→ODE”,都是从随机采样模型过渡到确定性模型,而如果我们一开始的目标就是ODE,那么该过程未免显得有点“迂回”了。在本文中,笔者尝试给出ODE扩散模型的直接推导,并揭示了它与雅可比行列式、热传导方程等内容的联系。 Rectified Flow 理论推导 微分方程 像GAN这样的生成模型,它本质上是希望找到一个确定性变换,能将从简单分布(如标准正态分布)采样出来的随机变量,变换为特定数据分布的样本。flow模型也是生成模型之一,它的思路是反过来,先找到一个能将数据分布变换简单分布的可逆变换,再求解相应的逆变换来得到一个生成模型。 ...
Generative Model
2026-01-11

DDPM 有一个非常明显的问题:采样过程很慢。因为 DDPM 的反向过程利用了马尔可夫假设,所以每次都必须在相邻的时间步之间进行去噪,而不能跳过中间步骤。原始论文使用了 1000 个时间步,所以我们在采样时也需要循环 1000 次去噪过程,这个过程是非常慢的。 为了加速 DDPM 的采样过程,DDIM 在不利用马尔可夫假设的情况下推导出了 diffusion 的反向过程,最终可以实现仅采样 20~100 步的情况下达到和 DDPM 采样 1000 步相近的生成效果,也就是提速 10~50 倍。这篇文章将对 DDIM 的理论进行讲解,并实现 DDIM 采样的代码。 DDPM 的反向过程 首先我们回顾一下 DDPM 反向过程的推导,为了推导出 [Math] 这个条件概率分布,DDPM 利用贝叶斯...